




Если x/t0 4; 1, то процесс модуляции можно рассматривать как статический, т. е. в промежутке t0 амплитуду и фазу ЧМ-колебания на выходе линейной цепи можно определять методом комплексных амплитуд (по АЧХ и ФЧХ), как в стационарном режиме. Общее решение методом мгновенной частоты изложено в [11].
Применим указанный метод к оценке нелинейных искажений при гармонической ЧМ. Пусть мгновенная частота
cu(tf) = co0-f AcoflcosQ/. (15.66)
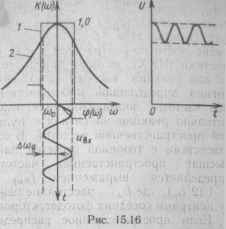
Согласно методу мгновенной частоты в квазистационарном приближении выходное напряжение линейной цепи с передаточной функцией К (И
Здесь ывх (г) — входное ЧМ-колеба-ние; i|> (г) = u)0t + т sin Qr — его полная фаза; ср (со) — ФЧХ цепи.
Амплитуда выходного напряжения (15.67) изменяется по закону U {t) = Аи К (со„ f Дсод cos Qt), а мгновенная частота

— слагаемое, характеризующее влияние ФЧХ на изменение мгновенной частоты выходного колебания. При настройке цепи на среднюю частоту ЧМ-сигнала ый с учетом симметричности ФЧХ относительно со,, частота (15.68 а) может быть разложена в ряд Фурье, который содержит лишь
нечетные гармоники частоты модуляции (2н 1 1) Q, п ~ 0, 1,2,...:
 (15.69)
(15.69)
где S,, Sa,... — амплитуда гармоник функции s (t). Подставляя ряд (15.69) в (15.68), получаем

Сравнивая закон изменения частоты для входного (15.66) и выходного (15.70) ЧМ-сигналов, замечаем, что влияние избирательных цепей линейной части приемника вызывает не-, большое изменение амплитуды частотного отклонения и запаздывание фазы основной частоты модуляции Q на угол у да arctg (Si /АсОд), а также возникновение нечетных гармоник сообщения в законе изменения мгновенной частоты. Это и есть нелинейные искажения сообщения, проявляющиеся на выходе частотного детектора.
Таким образом, чтобы рассчитать нелинейные искажения ЧМ-сигнала в линейных цепях приемника, необходимо записать ФЧХ ср (со), взять производную по времени dtp/dr = = S(t), и разложить ее в ряд Фурье, определив амплитуды гармоник 52п+| (я = 0,1,2...).
Коэффициент нелинейных искажений определяется соотношением
 (15.71)
(15.71)
Приведем результаты расчета коэффициента нелинейных искажений для 3-й гармоники при прохождении ЧМ-колебаний через одиночный колебательный контур:
 (15.72)
(15.72)
где т = Асо д/Q.
При Ло)дт„. 1 формула (15.72) упрощается и принимает вид к3 да да (Асодт„)3/4т. Для «-каскадного усилителя с одиночными контурами к<л> пи-., да п (Ашдт„)я Ат.
При воздействии на приемник мешающего ЧМ-сигнала со спектром, находящимся вне полосы пропускания приемника, могут возникнуть перекрестные искажения полезного сигнала из-за нелинейности вольт-амперных характеристик активных приборов. Коэффициент частотных (фазовых) перекрестных искажений определяется отношением перекрестной и полезной модуляций сигнала: Кпер = Афиер/Афг- Так- Д-™ избирательной системы в виде одиночного колебательного контура перекрестная модуляция возникает из-за воздействия напряжения помехи на изменение активной и реактивной составляющих проводимости электронного прибора, что соответственно вызывает изменение добротности AQ и емкости ДСК контура.
Коэффициент перекрестной модуляции 1101

где Q и Ск — добротность и емкость контура.
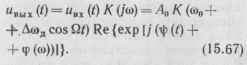
Еще одной причиной нелинейных искажений является возникновение паразитной амплитудной модуляции при прохождении ЧМ-сигнала через избирательные цепи (рис. 15.16) с криволинейными фазовыми характеристиками. При точной настройке линейной части приемника на среднюю частоту ЧМ-сигнала амплитуда его на выходе избирательной цепи изменяется с удвоенной частотой модуляции. Если же в приемнике имеется некоторая расстройка по частоте, то амплитуда сигнала еще больше искажается и появляются нелинейные искажения также на основной частоте модуляции. Естественно, что при детектировании все эти искажения выявляются в выходном сигнале. Для устранения влияния паразитной AM в демодуляторах ЧМ-сигналов используют амплитудный ограничитель, предшествующий частотному детектору.
Линейные искажения ЧМ-сигнала связаны с тем, что амп литуды боковых составляющих спек ра при прохождении их через избир тельные цепи уменьшаются, что экв; валентно уменьшению индекса мод ляции. Расчет линейных искажен! производят как спектральным мет дом (при т < 1), так и методом мгн венной частоты (т)>• 1). Нетрудно п пять, что если ЧМ-колебание проход! через усилитель с идеальным полос вым фильтром (график / на рис. 15.И у которого АЧХ К (со) равномерна полосе Дсо, занимаемой спектром си нала (Дсо > 2А(од), а ФЧХ ст (со) л нейна в пределах той же полосы,; амплитуды всех k-x спектральных с ставляющих сигнала получат один ковое усиление и линейный сдвиг ф &Ф,, где ф, — фазовый сдвиг nepei боковой частоты относительно нес щей. Таким образом, в этом случ происходит лишь запаздывание времени, а линейные искажения с сутствуют.
Когда же избирательная цепь с личается от идеальной, возникают л нейные искажения. Поясним это 1 примере прохождения ЧМ-колеб ния через резонансный усилитель одиночным колебательным контур! (на рис. 15.16, график 2), у которо уравнение нормированной АЧХ их ет вид п ■ \1у 1 4- а|к, где аяк
2A<o<<Wto0 — обобщенная расстройка контура.
В случае узкополосной гармонической ЧМ (т — Дид/Q С 1) колебание, прошедшее через резонансный усилитель, описывается выражением

Следовательно, амплитуды частотного отклонения (девиации Дсод) у боковых частот ослабляются в п раз, т. е. происходят линейные искажения, а фаза модуляции запаздывает на угол Ф = arctg а-лк. Вместе с тем закон изменения мгновенной частоты to (t) сохраняется неизменным, т. е. нелинейные искажения отсутствуют.
Аналогично может быть произведен расчет ослабления девиации частоты для каждой из частот спектра ЧМ-колебания и при т > 1.
§ 15.6. Приемники ЧМ-сигнала с обратным управлением
Техника приема ЧМ-сигналов непрерывно совершенствуется в направлении повышения помехоустойчивости в условиях воздействий на приемники достаточно больших помех, при которых помехоустойчивость обычных (некогерентных) приемников ЧМ-сигналов падает. Таким образом, инженерная мысль работает над эвристическими методами снижения пороговых областей приема ЧМ-сигнала (см. § 15.4).
Идея повышения помехоустойчивости ЧМ-приемников заключается в более полном использовании свойств ЧМ-сигнала. Рассматривая частотно-временную плоскость — со, /, изобразим на ней закон изменения частоты во времени (рис. 15.17) для простейшего случая гармонической ЧМ. Если закон ЧМ априорно известен и в момент времени tt мгновенная частота принимает значение со (г,), то с высокой вероятностью можно записать пределы значений мгновенной частоты в момент времени tx -f Дг:

Из этого выражения следует, что можно создать устройство типа узкополосного линейного фильтра с регулируемой средней частотой, которое следило бы за мгновенной частотой принятого ЧМ-сигнала (см. рис. 15.17). Важно, что при таком приеме полоса пропускания следящего фильтра должна воспроизводить полезный сигнал, спектр модулирующих частот которого ограничивается максимальной частотой Fmax. Поэтому необходимо, чтобы полоса пропускания фильтра ДГф > 2/гтах. Вспомним, что в обычном некогерентном приемнике (см. § 15.4, рис. 15.10) ширину полосы пропускания УПЧ выбирали, исходя из ширины спектра частот, занимаемого ЧМ-сигналом, при этом ДТупч > 2(1 -т т) Fmax.
Очевидным преимуществом приемника со следящим фильтром является значительное уменьшение мощности шумов, поступающих на вход демодулятора. Уменьшение шумов можно оценить через отношение полос пропускания ДГупч/ДТф «(1 ; т), т.е. приблизительно в индекс модуляции раз, что обеспечивает повышенную помехоустойчивость приема, выражающуюся в снижении критического порогового уровня.
Далее рассмотрим несколько способов структурной реализации следящих приемных систем.
Приемник со следящей настройкой (рис. 15.18). Специфическая его часть состоит из узкополосного УПЧ, резонансная частота которого с помощью управляемого элемента (УЭ) изменяется частью напряжения, поступающего с выхода частотного детектора (ЧД) через ФНЧ, придающий управлению избирательный характер. Переменная составляющая сор^, резонансной частоты следящего УПЧ связана с переменной составляющей шх^, колебательного процесса в УПЧ соотношением со„_. = К„ых^, где
 — передаточная функция частотной девиации, т. е. отношение комплексных амплитуд частотной девиации ЧМ-колебания на следящем фильтре к частотной девиации ЧМ-сигнала на его входе; а = R /2L — коэффициент затухания узкополосного УПЧ; Ку— комплексный коэффициент передачи тракта управления резонансной частотой следящего фильтра, включающего в себя ЧД, ФНЧ и УЭ. Зависимость \КЧ\ от Q называется эквивалентной частотной характеристикой следящего фильтра и имеет вид, показанный на рис. 15.19, где ту — постоянная времени эквивалентной уп-
— передаточная функция частотной девиации, т. е. отношение комплексных амплитуд частотной девиации ЧМ-колебания на следящем фильтре к частотной девиации ЧМ-сигнала на его входе; а = R /2L — коэффициент затухания узкополосного УПЧ; Ку— комплексный коэффициент передачи тракта управления резонансной частотой следящего фильтра, включающего в себя ЧД, ФНЧ и УЭ. Зависимость \КЧ\ от Q называется эквивалентной частотной характеристикой следящего фильтра и имеет вид, показанный на рис. 15.19, где ту — постоянная времени эквивалентной уп-
равляющей цепи. Основной недостаток подобной системы — относительная сложность устройства и возможность потери входного сигнала, если оценка частоты на выходе ФНЧ неверна.
Приемник с отрицательной обратной связью по частоте (рис. 15.20). Эффекта следящего УПЧ можно достигнуть иным способом, используя обратную связь по частоте (ОСЧ). Напряжение с выхода ЧД подается через фильтр нижних частот (ФНЧ) и управляемый элемент (УЭ) на управляемый генератор (УГ), осуществляя его частотную модуляцию. При этом знак модуляции УГ соответствует знаку полезного ЧМ-сигнала.
«Частота покоя» УГ, соответствующая нулевому значению напряжения на его выходе, сдвинута относительно средней частоты соп ЧМ-сигнала на величину со,,.
Напряжение УГ можно записать в виде
 (15.73)
(15.73)
где со7 (г) — оценка частоты гетеродина.
юв*
Ш
В результате воздействия на смеси тель (См) двух синфазно-модулиро-ванных сигналов:
от УРЧ us(t) = A0sm [co0t +
 и от УГ [см.
и от УГ [см.
(15.73)1 образуется сигнал со средней частотой шп, модулируемый по частоте сигналом ошибки, допускаемой при оценке мгновенной частоты входного сигнала:

Кчц, /Cyi— коэффициенты передачи ЧД и УГ; Н (р) — передаточная функция ФНЧ.
Из выражения (15.74) следует, что частотное отклонение входного ЧМ-сигнала уменьшается системой ОСЧ в 1 + Кчд Куг Н (р) раз, так что перед ЧД можно поставить узкополосный УПЧ с фиксированной настройкой, который должен без искажений фильтровать полезные сигналы в полосе ДТупч > 2/7тах и режектиро-вать все остальные частоты. Сигнал с выхода узкополосного УПЧ подается на амплитудный ограничитель (АО) и ЧД, выходное колебание которого складывается из напряжения, пропорционального ошибке «чд ft
*= Кчд |со (/) — шг (г)|, и шумов. Последние влияют на точность оценки частоты, поэтому в петле регулирования всегда существует сигнал ошибки, вводящий систему в режим синхронизации по частоте. По аналогии со следящим фильтром для приемника с ОСЧ можно ввести эквива-
лентную передаточную функцию как отношение комплексных амплитуд частотных отклонений напряжения УГ и входного сигнала:

Таким образом, введение ОСЧ приводит к сжатию спектра входного сигнала, что способствует у пию шума на входе ЧД и снижению пороговой области ЧМ-приема.
Приемник с ФАПЧ (рис. 15.21). Особенность его состоит в том, что узкополосность приемного тракта создается только по низкой частоте — с помощью фильтра ФНЧ. На фазовый детектор (ФД) подаются два напряжения — управляемого гетеродина (УГ) с мгновенной фазой 9 (/), являющейся оценкой мгновенной фазы принимаемого ЧМ-сигнала:
uT(t) =j= (Уго cosloV -H 9(01, и принятой смеси сигнала и шума иг (/)-• = Л„ sin \uj„t + 9(01 + "ш (0-
На выходе ФД образуется напряжение разностной и суммарной частот
ифд (0~ sin (9 (|) - 9>)|-г
^sin[2too/+9(0 + '9(0l + «m (t).
После прохождения через ФНЧ второе слагаемое отфильтровывается, а первое будет создавать входное управляющее напряжение УГ в правильном направлении при условии,
что |9 (t) — 8* (01 < л. Следовательно, данная система будет отслеживать мгновенную фазу принимаемого сигнала, так как выходное колебание УГ синхронизировано по фазе с принимаемым сигналом. Подобная система похожа на оптимальный демодулятор приемника ЧМ-сигналов, полу-
ченный в результате синтеза на основе теории нелинейной фильтрации (см. § 15.4). Однако отнести приемники ЧМ-сигнала с обратным управлением к классу оптимальных или квазиоптимальных систем пока нет достаточно строгих теоретических обоснований.
§ 15.7. Приемники однополосных сигналов
В § 15.2, 15.4 рассматривались приемники двухполосных AM- и ЧМ-сигнаЛов, где полезная информация содержится как в верхней, так и в нижней боковых полосах сигналов. В целях экономии мощности передатчика и уменьшения полосы частот излучаемого сигнала, что особенно важно в многоканальных радиолиниях связи и телеметрии, ограничиваются излучением одной боковой полосы (ОБП) частот (рис. 15.22). Напряжение одной верхней боковой частоты этого сигнала u6 mAAJ2 X xcos((o,. il)t представляет собой гармоническое колебание. Амплитудное детектирование подобного колебания даст постоянное напряжение, пропорциональное тАА0/2, частотное детектирование— также постоянное напряжение, пропорциональное частоте Q. На выходе же детекторов необходимо иметь переменные напряжения с частотой сообщения П. Следовательно, детектировать сигнал только одной боковой полосы частот нельзя, а нужно передавать или создавать искусственно в приемнике несущую частоту <о,.. Поэтому приемники сигналов с ОБП в соответствии с характером излучаемого сигнала могут быть двух типов: 1) с восстановлением в приемнике несущей частоты 10(. из не полностью подавленного колебания этой частоты в передатчике (см. рис. 15.22) или передачей специального «пилот-сигнала» шйс, расстройка которого по отношению к частоте сос является строго постоянной; 2) с воспроизведением в приемнике несущей частоты сос без
передачи «пилот-сигнала» или сигна л а на несущей частоте.
Таким образом, в обоих случая: для осуществления операции детек тирования в приемнике требуете; опорный сигнал с несущей частоте!
"оп = Uо cos (сос/ + Ч?о)-
Если к амплитудному детектор! подвести сумму напряжений опорной сигнала и верхней боковой полое! принятого сигнала:

При большой амплитуде опорной сигнала по сравнению с принятьи (U0 > Vi) квадратный корень мож но представить степенным рядом i пренебречь членами высших поряд ков, что приведет выражение (15.75 iK виду.:гк

где т-. — Ui/Uu — коэффициент AM Эта огибающая обычного АМ-ко лебания и будет воспроизведена ам плитудным детектором, на выходе ко торого получается сумма постоян ной составляющей и переменных на пряжений с частотами Q{.

