




образователях частоты СВЧ-приемни ков импульсных сигналов использую смесители на точечно-контактных дис дах, диодах с барьером Шотки (на ча стотах до 150 ГГц) и полевых транзис торах с барьером Шотки (на частота до 70 ГГц). Наибольшее распростране ние получили диодные балансны смесители с барьером Шотки. О сное ными параметрами этих смесителей которые влияют на чувствительност приемника, являются коэффициен шума и потери преобразования. Так ДБШ на основе арсенида галлия имс ет потери преобразования L 4ч-1 дБ и коэффициент шума Кш -
2 -7 -7,5 дБ. Особое влияние они приобретают в случае, когда на входе приемника отсутствует МШУ. Если же применяется МШУ с большим коэффициентом усиления по мощности, то влиянием преобразователя частоты на чувствительность приемника можно пренебречь. Схемы диодных смесителей и их особенности были подробно рассмотрены в гл. 5.
Усилитель промежуточной частоты. Усилитель промежуточной частоты приемника импульсных сигналов определяет такие показатели ЛПЧ, как избирательность по соседнему каналу, ширина полосы пропускания, отношение сигнала к шуму на выходе, усиление и динамический диапазон выходного сигнала. Поскольку обычно ширина полосы входной цепи и МШУ оказывается больше, чем в УПЧ, ширина полосы ЛЧП определяется главным образом УПЧ. Последняя зависит от длительности импульса, которая обычно мала (1,0 -7 -0,01)- 10_в с и выбирается из условия получения либо наибольшего отношения мощности сигнала к шуму на выходе, либо заданных искажений огибающей выходного импульса.
При расширении полосы ЛЧП увеличивается уровень шума, что приводит к уменьшению динамического ди-
Та блица 12.1
| Динамический лиапаюн. дВ | ||
| Входные устройства приемника | 
| 
|
| Балансный диодный | ||
| смеситель | ||
| Транзисторный МШУ | ||
| Усилитель на ЛБВ | ||
| Параметрический уси- | ||
| литель | ||
| Усилитель на тун- | ||
| нельном лноде |
апазона линейного тракта, который определяется отношением уровней максимального сигнала и шума на выходе. Он зависит от типа входных устройств (табл. 12.1) и свойств УПЧ. Из-за недостаточного динамического диапазона внешние помехи могут вызвать перегрузку или насыщение ЛЧП, подавляя или маскируя полезные сигналы. Для расширения динамического диапазона УПЧ применяют различные системы автоматического регулирования усиления и специальные усилители с логарифмической амплитудной характеристикой.
В радиоприемниках РЛС обнаружения различие в уровне принимаемых сигналов определяется различием эффективных площадей рассеяния (ЭПР) объектов и дальностей до них.
Влияние дальности ослабляют применением в УПЧ временной регулировки усиления, при которой усиление изменяется во времени по закону /<упч «const x'i, где т3 — время запаздывания сигнала. Такая регулировка изменяет усиление в соответствии со средним ожидаемым уровнем отражений от местных предметов на различных дальностях. Но отклонения от этих уровней величины сигнала в зависимости от ЭПР объектов, а также сигналы от других источников излучений могут нарушить работу приемника. Поэтому целесообразна такая система регулировки усиления, при которой суммарный уровень помех на выходе приемника поддерживался бы на определенном фиксированном уровне. Система АРУ могла бы поддерживать уровень помехи постоянным, но обычно ее не применяют из-за медленной реакции на изменение уровня помех. Для решения поставленной задачи в УПЧ обычно используют логарифмические усилители. Логарифмическим называют усилитель, амплитудная характеристика" которого описывается выражением с/вых = г7вЫх.н (logA,^—Ь
4- 1), (t /Bx > t7BX.„), где сУвЫх.н. £/вх.и амплитуды выходного и входного напряжений, соответствую-
щих началу логарифмического участка характеристики. При 0вХ < ^ с/вхн амплитудная характеристика всегда линейна: с7вых - KUBX.
Логарифмическую амплитудную характеристику обычно получают методом кусочной аппроксимации. Примером реализации такой характеристики параллельным суммированием сигналов может служить усилитель на ИМС К174УП2, фрагмент схемы которого показан на рис. 12.10. Каждый отдельный дифференциальный каскад усилителя имеет в некоторых пределах входного сигнала (0— 100 мВ) амплитудную характеристику, которую можно приближенно считать прямой (рис. 12.11, а). Кроме того, все четыре каскада этого плеча ИМС обладают различными коэффициентами усиления за счет применения аттенюаторов на входах второго (Г4, 7„), третьего (Т7, Г9) и четвертого (TUI, Ти) каскадов. При суммировании выходного сигнала первого - четвертого каскадов на транзисторах Т12ТЫ амплитудная характеристика всего усилителя оказывается близкой к логарифмической (рис. 12.11, б) [27].

На рис. 12.12 показана схема включения усилителя на ИМС К174УП2 для получения двухканаль-ного логарифмического усилителя, каждый канал которого имеет динамический диапазон входных сигналов 50 дБ. На этой ИМС можно построить также одноканальный усилитель с динамическим диапазоном <— 100 дБ.
§ 12.3. Прохождение импульсного сигнала через линейную часть радиоприемника
Рассмотрим прохождение высокочастотного импульсного сигнала через УПЧ с прямоугольной АЧХ (26):
и линейной фазовой характеристикой Ц (С») (ll>„ (!))/„, (Ч)>0).
Положим, что на входе УПЧ действует сигнал мвх(/) = <УвХ (г )х xexp(/o>rf)-
Тогда выходное напряжение будет определяться интегралом Дюа-меля:

где g (т) импульсная реакция фильтра; tVBblx (t) — огибающая выходного сигнала.
Для рассматриваемого УПЧ импульсная реакция имеет вид

Подставив это выражение в уравнение для инЫХ (/), получим

При точной настройке, когда сос — = со0, интеграл в последнем выражении разделяется на два, один из которых содержит множитель с удвоенной частотой 2(оп. Этим интегралом
можно пренебречь, так как огибающая сигнала изменяется значительно медленнее. Тогда можно записать приближенно

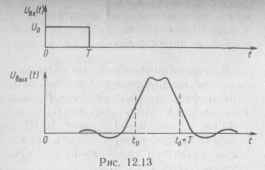
Если огибающая входного сигнала представляет собой прямоугольный импульс длительностью Т:
то огибающую выходного сигнала можно представить в виде


льныи синус.
На рис. 12.13 показана форма огибающей выходного сигнала (12.1), которая представляет собой видеоимпульс трапецеидальной формы.
При действии на входе УПЧ белого шума со спектральной плотностью N,, мощность шума на выходе

Здесь Пш — шумовая полоса УПЧ.
Выразим мощность сигнала на выходе через напряжение, соответствующее середине импульса в момент времени / = U V 772:


Так как с расширением полосы
Пш мощность шума возрастает пропорционально П,ц, а мощность сигнала увеличивается в меньшей степени, существует оптимальное значение полосы пропускания, при котором отношение q имеет максимум. В рассматриваемом случае
 (12.2)
(12.2)
При этом <7тах = 2,6 Э/лЛ/0, где Э = ОоТ/2 энергия радиоимпульса.
При использовании формулы (12.2) говорят, что полоса УПЧ «согласована» с длительностью импульса. При таком согласовании огибающая выходного импульса искажается. Поэтому в случаях, когда нужно точно фиксировать время прихода импульсного сигнала, стремятся сократить время нарастания сигнала и тем самым уменьшить искажения огибающей. Для этого расширяют полосу пропускания ЛЧП. Пели под временем нарастания т„ понимать время изменения амплитуды выходного напряжения от 0,1 до 0,9 установившегося значения, то для рассмотренного идеализированного фильтра можно записать тн = 0,86/Пш. Таким образом, время нарастания обратно пропорционально ширине полосы пропускания фильтра. В реальных полосовых фильтрах эта зависимость т„ от П„, сохраняется, а числовой коэффициент отличается от значения 0,86.
Сохранение формы огибающей импульсов важно в многоканальном приемнике импульсных сигналов с временным разделением каналов (см. гл. 13). В нем при «размывании» формы огибающей импульса возникают перекрестные искажения в каналах, когда «хвосты» от сигнала одного канала попадают в соседние каналы. Поэтому в таком приемнике ширину полосы пропускания ЛЧП выбирают из усЛовия (см. § 13.4) ПЛчп * 6/7\ где Т — длительность одиночного импульсного сигнала.
§ 12.4. Согласованные
и квазисогласованные фильтры
в радиоприемниках импульсных сигналов
В радиоприемниках импульсных сигналов часто применяется согласованный фильтр (СФ). Он может быть установлен в любом месте ЛПЧ: во входной цепи, в УРЧ или УПЧ. Обычно по причинам удобства технического построения СФ выполняют на промежуточной частоте.
Реализация точно согласованного фильтра затруднена, так как АЧХ фильтра должна совпадать со спектром импульсного сигнала, который имеет довольно сложный характер. Так, например, для одиночного радиоимпульса с прямоугольной огибающей АЧХ согласованного фильтра должна иметь вид функции |/C(/w)| sin хх, реализовать которую точно технически очень трудно.
Поэтому на практике вместо согласованных фильтров используют квазисогласованные фильтры (КСФ). Это физически реализуемые фильтры, полосу пропускания которых Пф выбирают так, чтобы отношение сигнала к помехе на выходе было максимальным для данных типов фильтра и одиночного импульсного сигнала длительностью Т (см. табл. 12.2). Та-
Та блица 12.2
| Форма импульсного сигнала | Тип фильтра | о x £ v «5 I3 | ■ а Бс С |
| Прямо- | Прямоугольный | !.37 | 0,91 |
| угольный | |||
| То же | Гауссов | 0,72 | 0,94 |
| Гауссов | > | 0.63 | 1,0 |
| Прямо- | Одиночный кон- | 0.4 | 0.9 |
| угольный | тур | 0.93 | |
| То же | Двухкаскадный усилитель с одиночными контура- | 0,61 | |
| ми | 0,94 | ||
| > | Пятикаскадный усилитель с одиночными контурами | 0,67 |
ки.м фильтром является рассмотренный в § 12.3 идеализированный УПЧ, ширина полосы которого «согласована» с длительностью импульса 1см. формулу (12.2)1.
Отношение сигнала к помехе на выходе КСФ меньше, чем на выходе согласованного фильтра. Потери оцениваются отношением ц- (P., J !Рш)ксф 1{2 Э/Л/0). Здесь (PCJPU1) '— отношение пиковой мощности сигнала к среднеквадратическому значению шума на выходе квазисогласованного фильтра. Ширина полосы КСФ может отклоняться от оптимального значения на 30—50%. При этом вероятность обнаружения ухудшается не более чем на 0,5 дБ. Поэтому считают, что произведение полосы КСФ на уровне — 6 дБ на длительность сигнала описывается приближенным равенством

(12.3)
Обычно полосу пропускания импульсного приемника выбирают несколько большей оптимального значения с учетом возможного доплеров-ского сдвига частоты принимаемого сигнала и допуска на нестабильность промежуточной частоты.
В простейшем случае в качестве СФ для одиночного импульсного сигнала используют резонансный УПЧ, ширина полосы которого «согласована» с длительностью импульса (12.3).
В радиолокации часто используются сигналы в виде конечной последовательности (пачки) повторяющихся когерентных высокочастотных импуль-
сов. Согласованный фильтр для такой пачки следует строить соответственно ее спектру. Если огибающая пачки имеет прямоугольную форму, то ее спектр

где 5„ (/си) спектр одиночного импульса; N — число импульсов в пачке; Т„ — период повторения импульсов.
Второй множитель в формуле (12.4) определяет операцию накопления-суммирования сдвинутых во времени на Тп, 2Т„, NT,, пачек импульсов. АЧХ накопителя |Д'с (/со) | состоит из ряда гребней (рис. 12.14), поэтому такой накопитель называется также гребенчатым фильтром (ГФ).
В соответствии с формулой (12.4) согласованный фильтр для пачки когерентных импульсов должен состоять из последовательно соединенных СФ для одиночного импульса и ГФ. Обычно вместо СФ для одиночного импульса используют квазисогласованный фильтр с шириной полосы Пксф == Гт,„ где т„ — длительность одиночного импульса.
Гребенчатый фильтр строят так, чтобы высота «зубьев» гребенки была одинаковой (однородный ГФ). «Зубья» настраивают на частоты, отстоящие друг от друга на 1/Т„. Ширину полосы каждого «зуба» определяют по формуле П, = l/NTu. Общее число фильтров Ж == Тп/т„ = Q = Пксф Ти, где Q скважность.
Гребенчатый фильтр улучшает отношение сигнала к шуму за счет узкополосной фильтрации каждой спектральной составляющей. Выигрыш в отношении сигнал/шум по мощности у пропорционален числу импульсов в пачке: у = n'W, где ц2— коэффициент потерь. Величина потерь обычно составляет 13 дБ.
Гребенчатые фильтры строят в виде рециркуляторов с задержанной обратной связью, трансверсальных фильтров на линиях задержки с от-
водами и весовым суммированием, а также системы многоканальных фильтров, настроенных на различные частоты. Современная технология позволяет изготовлять такие фильтры в микроэлектронном исполнении.
Рассмотренный случай применения ГФдля высокочастотных импульсных сигналов называется когерентным накоплением. Оно возможно только на таких временных интервалах, когда можно пренебречь флуктуаци-ями фазы принимаемых импульсов. Трудность осуществления когерентного накопления состоит в том, что суммирование сигналов с точностью до фазы налагает жесткие требования на фазовую стабильность элементов накопителя.
Отметим, что гребенчатые фильтры применяются также при некогерентном накоплении на видеочастоте, когда высокочастотные сигналы сначала детектируются линейным де-
тектором, а затем фильтруются ГФ.
Простые импульсные сигналы не разрешают возникающего при построении РЛС противоречия между стремлением получить лучшее разрешение по дальности (что требует уменьшения длительности импульса) и максимально возможную дальность обнаружения (что требует увеличения длительности импульса).
Указанное противоречие позволяют разрешить сложные импульсные сигналы, такие, как ЛЧМ и ФКМ. Они применяются также в системах передачи информации в качестве информационных и вспомогательных сигналов.
Выбор типа сложного импульсного сигнала для конкретных применений производится обычно путем исследования функции неопределенности
Во
Х (т.Од)= f ы (0"(|— т)ехр,(/£2дг)<д/,
представляющей собой отклик СФ на входной сигнал с доплеровским сдвигом частоты £2д. Вид функции неопределенности служит критерием, который используется при определении пригодности того или иного сигнала для решаемых задач. Так, «хорошим» радиолокационным сигналом считается, такой, функция неопределенности которого имеет резко выраженный пик в начале координат (т == 0; Од = 0). Он обладает хорошей разрешающей способностью по дальности и по скорости одновременно. Такие сигналы называются сложными или шумоподобными, к ним относятся дискретно-кодированные сигналы (ДКС). Они представляют собой последовательность высокочастотных импульсов, один из параметров которых (амплитуда, фаза или частота) модулирован в соответствии с определенным кодом. ДКС может быть записан в виде

Здесь // 1,2 N — число импульсов в пачке; ап — последовательность постоянных коэффициентов, характеризующих значения амплитуд импульсов; U„ (t) — видеоимпульс единичной амплитуды длительностью Т; шп, 0„ — дискретные значения частоты и сдвига фаз.
Наиболее распространенным сложным сигналом является импульсный фазокодоманипулирован-ный (ФКМ) сигнал, у которого амплитуда и несущая частота постоянны («,, = 1, ю„ 0), а последовательность фаз {9„} импульсов изменяется дискретно на два уровня (0; я) в соответствии с определенным бинарным кодом. Среди кодовых последовательностей широко используются последовательности максимальной длины (М-последовательности).
На рис. 12.15 показан ФКМ-сиг-нал, закодированный М-последова-
тельностью вида -f-----j---.
Знаки «I» и «-» означают начальные фазы парциальных импульсов (0 и 180), соответствующие применяемому коду.
Другим широко распространенным сложным сигналом является сигнал со ступенчатой ЧМ (8„ -0, ап = 1, {со„ = f{n)}) и его аналог — сигнал с линейной частотной модуляцией (ЛЧМ). Это импульсный сигнал длительностью Т, несущая частота которого изменяется по линейному закону
 (12.5)
(12.5)
Такой сигнал записывается в виде ис (t) — cos (о)„/ + рг2/2).
Согласованные фильтры для сложных импульсных сигналов. Структурная схема оптимального приемника сложных сигналов подобна схеме приемника простых импульсных сигналов. Отличие заключается только в способах построения согласованного фильтра и порогового устройства.
СФ для полностью известного ФКМ-сигнада должен иметь импульсную функцию также в виде ФКМ-сигнала, в котором последовательность чередования фаз соответствует коду, зеркальному по отношению к коду, использованному в сигнале. Такой импульсной функцией обладает фильтр, состоящий из многоотводной линии задержки (МЛЗ), сумматора и квазисогласованного фильтра (КСФ) для одиночного импульса длительностью Т (рис. 12.16). Этот фильтр обычно применяется на промежуточной частоте, а КСФ выполняется как УПЧ, согласованный по полосе с одиночным импульсом длительностью Т. Весовые усилители К\, К2, Кы имеют коэффициенты передачи, равные ±1 в соответствии с кодом, зеркальным по отношению к коду сигнала, если затуханием сигнала в МЛЗ можно пренебречь.
Образование выходного сигнала СФ для входного сигнала, показанного на рис. 12.15, иллюстрируется рис. 12.17. Выходной сигнал — высокочастотный импульс, основной лепесток которого имеет амплитуду, в N раз большую, а длительность ^вЫХ = = Т — в А/ раз меньшую, чем у входного сигнала. Поскольку составляющие сигнала складываются когерентно, а шумы — некогерентно (в квадратурах), отношение сигнала к помехе на выходе возрастает примерно л У N раз. Кроме основного импульса выходной сигнал имеет ряд малых импульсов (боковые лепестки), интенсивность которых пропорциональна величине \ty~N при N > 1.
На промежуточных частотах до 30 мГц СФ для ФКМ-сигналов могут быть построены на основе искусственных линий задержки с отводами. Не-
Достаток таких фильтров — большое число секций, состоящих из катушек индуктивностей и конденсаторов, а следовательно, большие габариты, очень жесткие допуски на разброс задержек в секциях и сложность согласования секций друг с другом. На сверхвысоких частотах СФ иногда изготовляют из отрезков длинных линий.
В настоящее время широкое распространение получили СФ на поверхностных акустических волнах, работающие в широком диапазоне частот, имеющие малые габариты и обладающие высокими качественными показателями (см. § 12.5).
Когда обнаружитель строят по схеме с квадратурными каналами (см. рис. 12.3), его линейную часть (УПЧ) выполняют как квазисогласованный фильтр для одиночного высокочастотного импульса.
На выходе перемножителей каналов в этой схеме образуются последовательности видеоимпульсов, соответствующие применяемому коду. Интеграторы каналов, в которых сжимается видеосигнал, также выполняются в виде линии задержки с фазовращателями и сумматором. Однако линия задержки, используемая в такой схеме, отличается от линии задержки в схеме рис. 12.16 тем, что в первой задерживаются видеосигналы, а во второй — радиосигналы. В сумматоре рис. 12.16 производится синфазное сложение сигналов, поэтому погрешность задержки между отводами не должна превышать доли периода промежуточной частоты Тпц, а в линии задержки для видеосигналов — доли длительности парциального импульса Т. Так как длительность Т % Тпч, а рабочая частота линии для видеосигналов значительно меньше, чем линии для сигналов промежуточной частоты, техническое построение линии задержки для видеосигналов значительно проще, чем для сигналов • промежуточной частоты.
СФ для ЛЧМ-сигнала строят обычно с помощью цепей, обладаю-
щих специальными характеристик ми. Если частота ЛЧМ-сигнала изм няется по закону (12.5) в предела Д/г = /2 — ft, то амплитудный спект такого сигнала при Д/СГ > 1 можн приближенно считать постоянным:
| S (/со) | да const в пределах К—2яД/с/2) < со < (со0 + 2лД/с/2),
(12.6
а фазовый спектр определяется квад ратичной функцией частоты
Ф(со) (со — со0)г/2р — Ь,со \-Ьг. (12.7
Здесь /?, и Ьг — постоянные величи ны.
Соответственно соотношениял (12.6), (12.7) квазисогласованньи фильтр для ЛЧМ-сигнала должен иметь прямоугольную амплитудную характеристику и квадратичную фазовую характеристику: arg К (/со) == —(со— со0)2/2р+ с\ю — — Ь2, которая соответствует линейной зависимости времени задержки от частоты (рис. 12.18):
хз(ш) -А — (©—<о0)/р. (12.8)
Таким образом, реализовать требуемую фазовую характеристику можно с помощью дисперсионной линии задержки, обладающей указанным свойством (12.8), в области частот
Д/с = /, - fv
Отношение мощностей сигнал/ шум в таком квазисогласованном фильтре для ЛЧМ-сигнала несколько меньше, чем в точно согласованном, и зависит от произведения AfcT. Так, при АСТ = 40 уменьшение отношения мощностей сигнал/шум со-
Рис. 12.19
ставляет 0,3 дБ, при АДГ — 100 — менее 0,2 дБ.
Выходной сигнал СФ при подаче на его вход ЛЧМ-сигнала определяется выражением
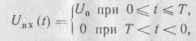
Его огибающая имеет вид функции sin xlx, причем длительность основного лепестка на уровне —4 дБ равна l'A/,.. Коэффициент сжатия сигнала, равный отношению длительностей входного и выходного сигналов, определяется произведением длительности входного сигнала на девиацию частоты: kt.w - Т/ТвЫХ = ТД/С. При доплеровском сдвиге частоты (2д Ф 0 выходные сигналы СФ огра-

ничены треугольником с основанием от — Т до f (рис. 12.19). Это определяется тем, что огибающая выходного сигнала является автокорреляционной функцией прямоугольной огибающей входного ЛЧМ-сигнала. При
Од=?^0 максимумы выходного сигнала при этом уменьшаются и размываются по длительности, причем чем больше отношение с2д/Дсо, тем больше проявляются эти эффекты.
СФ для Л ЧМ-сигналов строят на базе дисперсионных ультразвуковых линий задержки (ДУЛЗ). Действие ДУЛЗ основано на том, что звуко-проводы, выполненные из металлических полосок или стержней, обладают естественными дисперсионными свойствами. ДУЛЗ состоит пз входного преобразователя, в котором электрические колебания превращаются в ультразвуковые, звукопровода, в котором распространяются акустические волны, и выходного преобразователя, преобразующего акустические колебания в электрические. Преобразователи изготовляют из кварца или квазикерамических материалов, обладающих пьезоэлектрическим эффектом. В качестве звукопроводов применяют пластины из стали, алюминиевых или магниевых сплавов, плавленого кварца и других материалов. Толщина пластины — порядка длины ультразвуковой волны в звукопроводе для средней частоты спектра сигнала.
На рис. 12.20 показана зависимость нормированной задержки от нормированной частоты для первой продольной моды в линии из алюминиевой полоски толщиной h, в которой скорость распространения поперечных волн vt = 3,15-10* см/с. Из рисунка видно, что вблизи частоты перегиба существует область, в которой задержка почти линейно зависит от частоты. Отклонения от линейности этой характеристики вызывают искажения сигнала. Для их уменьшения применяют полоски со ступенчато изменяющейся толщиной. Это позволяет существенно уменьшить нелинейность, однако технологический
процесс изготовления такой линии задержки достаточно сложен.
Полосковые ДУ.ЛЗ обеспечивают сжатие радиоимпульсов от единиц до сотен микросекунд. ДУЛЗ из алюминиевых полосок применяются на частотах меньше 10 МГц, потери в них составляют 10--15 дБ. На частотах больше 30 МГц звукопроводы изготовляют из сталей, потери в них достигают 40 50 дБ.
В последнее время получили широкое распространение СФ на поверхностно-акустических волнах (см. § 12.5).
В тех случаях, когда в приемнике удобно создать опорный сигнал, согласованный фильтр для ЛЧМ-сигна-ла можно построить по корреляционному принципу. На рис. 12.21 приведена структурная схема оптимального измерителя запаздывания с ЛЧМ-сигналом. Опорный сигнал иои (/) создается путем ослабления сигнала передатчика (Прд) в аттенюаторе (Ат). Собственно корреляционным устройством служит перемножитель, на который подаются принимаемый и опорный сигналы, а также фильтр низкой частоты (ФНЧ) на его выходе. Так как обычно запаздывание принимаемого сигнала точно не известно, в приемнике применяется набор ФНЧ, соответствующих различным значениям запаздывания сигнала Дт. Решение о величине запаздывания сигнала принимается по максимуму напряжения на выходах фильтров в решающем устройстве (РУ).
Запишем опорный и принимаемый сигналы в виде
Выходной сигнал смесителя образуется в результате перемножения этих сигналов и усреднения результата перемножение. Пренебрегая вто-
рой гармоникой несущей частоты сигнала, получим
"вых (0 =cos(- (оДтЧ pAT a/2 -t-pATr) = cos(Q t.i -ьф), Йс=-р-Дт.
Здесь ф — начальная фаза выходного сигнала смесителя, a Qc его частота, зависящая от запаздывания Ат. Таким образом, в случае приема сигналов с различным запаздыванием на выходе коррелятора получаем импульсные сигналы с различной частотой заполнения. Поскольку при входном ЛЧМ-сигнале выходной сигнал коррелятора имеет огибающую вида sin хх. при приеме двух сигналов или более в таких приемниках возможно появление ошибок за счет наложения боковых лепестков сжатых сигналов.
Для их устранения применяется специальная весовая обработка выходного сигнала.
§ 12.5. Согласованные фильтры и конвольверы на ПАВ
В настоящее время получили широкое распространение согласованные фильтры на ПАВ, что объясняется удачным сочетанием их свойств (см. гл. 4) 1 3 I}.
Согласованные фильтры на ПАВ. Согласованный фильтр на ПАВ выполняют на подложке из кварца S7 '-cpe3a или из ниобата лития KZ-среза, на которую фотолитографическим способом наносят алюминиевые пластины — встречно-штыревые преобразователи (ВШП). Входной ВШП обычно содержит небольшое число пар электродов с постоянным перекрытием, а выходной ВШП непериодический, т. е. с неравномерным распределением электродов по длине.
Если фильтр предназначен для ЛЧ.М-сигнала, то положение электродов выходного ВШП в пространстве выбирают в соответствии с отсчетами ЛЧ.М-снгнала. при которых его фаза равна О или л (рис. 12.22).
Для сигнала ис (/) = ехр [—/Ф (t)) зависимость частоты от времени имеет вид
 а моменты выборок tn
а моменты выборок tn
находят из уравнения
Ф(г„)= ял + const. (12.9)
Соответствующие положения электродов преобразователя в пространстве определяются условием ln = vnABt„, где рпав — скорость ПАВ.
Для ЛЧМ-сигнала постоянной амплитуды с полосой Д/с и длительностью Т требуемый импульсный отклик согласованного фильтра
Из соотношений (12.9) и (12.10)' следует, что

где N — полное число электродов в структуре. Из последнего уравнения определяют положение электродов в пространстве. Полагая, что в середине структур In 0. найдем
Таким образом, положения электро дов в пространстве непосредственно связаны с фазой требуемого импульсного отклика фильтра [см. формулу (12.10)|.
Для повышения коэффициента сжатия ЛЧМ-сигнала увеличивают произведение его длительности на ширину полосы 7"А/'С. Это приводит к необходимости удлинения звукопровода фильтра. Для получения коэффициента сжатия ГД/С > 10 000 применяют многоканальные структуры фильтров. На рис. 13.23 показаны схема фильтра с тремя акустическими каналами и результирующая дисперсионная характеристика.
Схема согласованного фильтра на ПАВ для ФКМ-сигнала подобна схеме для ЛЧМ-сигнала, но выходной ВШП у него выполняется соответственно применяемому коду. Для двухпозиционных ФКМ-сигналов поворот фазы на |80° производится просто изменением полярности подключения отвода к суммирующей шине. Схема СФ для такого сигнала при небольшом числе элементов кода /V < AV(2 3), когда в преобразователе обеспечиваются минимальные энергетические потери, показана на рис. 12.24 (iVt — i'rlAB/At> — число «эффективных» электродов преобразователя; Дк /у[1ДВ — относительное изменение скорости ПАВ за счет металлизации диэлектрика, зависящее от коэффициента электромеханической связи).
При большом числе элементов кода N *Э> Nx фильтр выполняется по многоканальной схеме. Параллельный вариант такой схемы показан на рис. 12.25. Здесь входной преобразователь «ступенчатой» формы, образующий многоотводную линию задержки с шагом дискретизации т. состоит из обычных двухфазных преобразователей, установленных со сдвигом /,-—
Quot;'пав- '"0. 1.....
Выходной преобразователь длиной I = kli имеет k параллельных выходов. Требуемые фазовые соотношения достигаются изменением полярности включения каждого из rik— М отводов выходного преобразователя.
В современных фильтрах на ПАВ для ЛЧМ-сигналов ширина полосы пропускания порядка 500 МГц, время задержки 100 мкс, средняя частота 1,3 ГГц, а произведение времени задержки на полосу пропускания порядка 16 000.
Конвольверы на ПАВ. Конвольверами или акустоэлектрическими устройствами свертки называют устройства, производящие операцию свертки (конволюции) двух функций с временным сжатием одной из них. На основе конвольверов строят корреляторы, конструктивные особенности которых не связаны с формой обрабатываемых сигналов [191.
Операция свертки оказывается возможной благодаря тому, что взаимодействие поверхностных акустических волн из-за нелинейных свойств кристалла определяется не только линейной, но и некоторой нелинейной составляющей индукции (в простейшем случае квадратичной). Поэтому в каждой точке кристалла, в которой существуют ПАВ, вызванные обоими сигналами, происходит их перемножение. Если проинтегрировать результаты перемножения по всей области взаимодействия, то при условии, когда длительность сигнала меньше длины области взаимодействия, выходной сигнал будет представлять собой свертку входных сигналов:

(12.11)
где с — постоянный коэффициент.
Эта функция отличается от принятого определения свертки множителем 2. Поэтому для получения точных значений свертки и корреляции необходимо дополнительное преобразование входных сигналов — обращение во времени, сжатие или растяжение одного из сигналов.
Схема конвольвера вырожденного типа, работающего с сигналами одинаковой частоты, показана на рис. 12.26. Она содержит два входных ВШП (/, 2) и выходной параметрический электрод (<?), являющийся интегратором с постоянной времени RC, где У? и С — сопротивление и емкость звукопровода (4). Потери в конвольвере зависят от свойств материала звукопровода и уровней сигналов. Они оцениваются значениями внешнего 1>КНШ и внутреннего БК„Т билинейных коэффициентов:
Здесь Раых. РВХ1. ^вх2' Рвх\'Рвх2 мощности электрического или акустическо го сигнала на соответствующих входах БКВШ характеризует коэффициент преоб разования устройства в целом, а БКВТ -потери на нелинейное взаимодействие Так как выходной сигнал зависит от фор мы входных сигналов, билинейный ко эффициент принято определять для вход ных сигналов прямоугольной формы. Прт этом Я|ых Umax /?н. где (7тах — ампли туда выходного сигнала; /?н — сопротивление нагрузки.
Типовые значения параметров конвольверов приведены в табл. 12.3.
Конвольверы на ПАВ применяются на частотах до 1 ГГц. Ширина полосы пропускания конвольвера определяется полосой пропускания ВШП. Время интегрирования зависит от размеров звукопровода. Динамический диапазон входных сигналов достаточно высок (40—50 дБ и выше). Он ограничивается уровнем ложных сигналов, в числе которых содержатся вторые гармоники входных сигналов. Уровень по-
Таблица 12.3
| Конструкция | Материал | Параметры | ||||
| Si x is — rf | • £0 Si | и к x s ь. | я L_ | is.u | ||
| Вырож- | LiNbO:, | —89 | ||||
| денная | ||||||
| То же | PZT | — | -30 | 6,8 | ||
| » | CdS | — | -66 | 8,7 | 2,5 | |
| Невы- | LiNbO., | —44 | —31 | 2.7 | 11,2 | 80; |
| рожден- | ||||||
| ная | ||||||
| диодная. | ||||||
| парал- | ||||||
| лельная | ||||||
| То же | » | —46 | -26 | 5,5 | 120; | |
| » | » | -55 | —35 | 67,6; | ||
| 97.5 |
Примечание. П — полоса пропускания; Г» время интегрирования; /|, j-2 — входные частоты; PZT — керамика ти-танат — цирконат свинца.
следи их уменьшают, используя параметрический электрод с зубчатыми краями (см. рис. 12.26). Глубина зубцов равна к 2. за счет чего гармоники приходят на параметрический электрод в противофазе и компенсируются.
Основной недостаток вырожденного конвольвера — низкий БКвгп- Для его увеличения используют различные формы нелинейных взаимодействий акустических волн в твердых телах и создают более совершенные конструкции. Наиболее эффективными в настоящее время считаются кон-вольверы с внешними нелинейностями. Схема такого конвольвера параллельного типа приведена на рис. 12.27. Он состоит из МЛЗ на ПАВ. к каждому преобразователю которой присоединен полупроводниковый диод. На диоды подается постоянное смещение, которое позволяет выбрать рабочую точку с максимальным значением БКвш, Обозначения на рисунке Ср — разделительная емкость, Др — дроссель для замыкания цепи диодов по постоянному току.
Диодное устройство свертки производит суммирование выборок произведе ния входных сигналов:

(12.12)
где р — номер отвода линии задержки;.V — число отводов: т3 — время задержки между электродом 1 и центром области взаимодействия; /р время отбора выборок произведений волн, пересекающих р-й отвод.
При уменьшении расстояния между отводами выражение (12.12) приближается к интегралу акустической свертки (12.11).
Основное достоинство диодных устройств свертки — наиболее высокий из всех акустических устройств БКнш. достигающий значения порядка —30 дБ. МВт при времени интегрирования 10—20 мкс.
Динамический диапазон акустических диодных устройств ограничен сверху насыщением вольт-амперной характеристики диода и достаточно высок (до 80 дБ). Для уменьшения уровня ложных сигналов, вызванных вторыми гармониками входных сигналов, используют невырожденный режим, когда входные сигналы имеют различные частоты. При этом вторые гармоники сигналов отфильтровываются от выходного сигнала разностной частоты фильтрами.
Недостаток диодных устройств свертки — ограниченная полоса пропускания П, зависящая от расстояния Л/ между отводами линии задержки: П = v/Al.
В настоящее время получены полосы до 50 МГц при значениях произведения ПТ„ порядка 6000.
ГЛАВА 13
РАДИОПРИЕМНЫЕ УСТРОЙСТВА ИМПУЛЬСНО-АНАЛОГОВЫХ СИГНАЛОВ (ИАС)
§ 13.1. Особенности ИАС
Имиульсно-аналоговый сигнал имеет вид последовательности радиоимпульсов, параметры которых функционально связаны с передаваемым аналоговым сообщением.
Применение импульсной модуляции при передаче аналоговых сообщений позволяет осуществить многоканальную передачу сообщений и повысить помехоустойчивость системы связи.'
Передача информации от нескольких источников по одному каналу связи оказывается возможной за счет использования «свободных» временных интервалов между импульсами. Такой способ передачи сообщений называется многоканальной передачей с временным разделением каналов. На рис. 13.1 показан групповой (модулирующий) сигнал, в котором сообщения от отдельных источников X, (/),
к2 (/)..... А,„ (/) дискретизируются во
времени. Соответствующие величинам
отсчетов видеоимпульсы следуют поочередно с защитным интервалом т3, а сообщения от одного и того же источника — с интервалом дискретизации Т. Здесь передаваемое сообщение связано с амплитудой импульсов. Такой вид первичной модуляции называется амплитудно-импульсной модуляцией (АИМ).
Если с передаваемым сообщением функционально связана длительность импульсов, то это —широтно-им-пульсная модуляция (ШИМ), если момент появления импульсов — время-импульсная модуляция (ВИМ), а если несущая частота импульсов — частотно-импульсная модуляция (ЧИМ). Если дискретное значение сообщения квантуется по амплитуде, кодируется и передается кодовой группой видеоимпульсов, то такая первичная модуляция называется ко-доимпульсной модуляцией (КИМ). Эти последовательности импульсов рассматривают как поднесущее колебание. В зависимости от того, какой параметр высокочастотного колебания модулируется поднесущим колебанием, различают амплитудную, частотную или фазовую вторичную модуляцию. Различные сочетания первичной и вторичной модуляции дают разнообразные виды двукратной модуляции, например АИМ/AM, ШИМ/АМ, ВИМ/АМ, КИМ/AM и т. д.
Так, сигнал вида АИМ/ЧМ может быть записан в виде ис (Я.,, /, ф) — = U cos [(cou + £lkL)t + qj.
О < t < т, Я*. = 0,1,2..... L — 1.
Здесь информационным параметром будет частота девиации QkL, которая может принимать L значений, но на интервале времени т, отводимом для передачи одного отсчета, остается постоянной.
Важным достоинством импульсной модуляции является возможность повышения помехоустойчивости приема.
При импульсной модуляции непрерывный модулирующий сигнал дополнительно ■ преобразуется в импульсный модулирующий сигнал, имеющий более широкую полосу час-
тот П, чем непрерывный, но содержащий ту же исходную информацию. Прием такого сигнала требует меньшего отношения сигнал шум при той же пропускной способности канала /:
 (13.1)
(13.1)
Однако ни один из современных методов модуляции не позволяет полностью использовать возможности, следующие из уравнения (13.1). Дело в том, что в практических условиях приходится применять более широкие полосы, чем те, которые определяются уравнением (13.1). Так, полосу пропускания ЛЧП выбирают шире спектра сигнала из-за доплеровского сдвига частоты принимаемого сигнала, недостаточной стабильности час-стоты задающего генератора передатчика и гетеродинов приемника, а также для уменьшения перекрестных искажений между каналами. Поэтому реальная пропускная способность радиоканала оказывается больше той, которая требуется для передачи исходной информации.
В настоящее время наиболее перспективными для многоканальных систем передачи информации считаются КИМ-сигналы. Их применяют в радиотелеметрии, радиорелейных системах связи, дальних тропосферных линиях связи, а также в радиотелефонии, волноводных и оптических линиях многоканальной связи.
Важнейшими достоинствами многоканальных систем связи с КИМ являются:
высокая помехоустойчивость по сравнению с системами аналоговой модуляции, позволяющая применять ее при большем уровне шума;
отсутствие накопления шумов при ретрансляции в радиолиниях большой протяженности за счет регенерации КИМ-сигналов;
удобство использования аппаратуры КИМ-сигналов для микроминиатюризации;
удобство сопряжения КИМ-сигналов с ЭВМ, что позволяет осуществить цифровую обработку сигналов.
Недостатки КИМ-сигналов — более широкие полосы пропускания, наличие порога помехоустойчивости и сложная приемная аппаратура. Однако они компенсируются отмеченными преимуществами.
§ 13.2. Структурная схема приемника ИАС
В радиоприемном устройстве ИАС из высокочастотного сигнала выделяется групповой сигнал, последний разделяется по каналам, каждый из которых соответствует своему источнику сообщений.
Выделение группового сигнала
(вычисление оценок kj (/,) передаваемых отсчетов в дискретные моменты времени) происходит в демодуляторе, который может быть оптимальным (квазиоптимальным) или неоптимальным.
Восстановление непрерывного сообщения осуществляется путем интерполяции полученных оценок в специальном устройстве на выходе приемника.
Структурная схема приемника ИАС приведена на рис. 13.2. Она состоит из ЛЧП, демодулятора (Д), селектора каналов (СК), генератора сигналов временной синхронизации
(ГСВС) и генератора опорных сигналов (ГОС).
В ЛЧП производится усиление сигнала до уровня, необходимого для качественной работы демодулятора. При некоторых типах модуляции в ЛЧП применяется автоматическая подстройка частоты и фазы несущей. Демодулятор строят по некоторому оптимальному алгоритму соответственно выбранному критерию оптимальности и априорным сведениям о сигнале и помехе.
Положим, что значения передаваемого (информационного) параметра к (ti) квантованы, все передаваемые уровни в приемнике известны и все другие неинформационные параметры высокочастотного сигнала также известны. При этих условиях задачу оценки неизвестного параметра сигнала, скрытого шумом, можно рассматривать как задачу многоальтернативного различения (см. гл. 11). Соответственно алгоритму (11.25) демодулятор приемника должен быть построен по схеме многоканального коррелятора (рис. 13.3). Отметим, что в этом случае сигналы, несущие информацию о значении параметра к (ti), должны быть ортогональны, с тем чтобы на выходе только одного из корреляторов был полезный сигнал. Таким образом, многоканаль-ность позволяет устранить «незнание» передаваемого параметра, квантованные значения которого известны.
В демодуляторе рис. 13.3 в соответствии с алгоритмом (11.25) вы-
числяются функционалы правдоподобия всех возможных значений передаваемого параметра Я,- для данного такта передачи. В решающем устройстве (РУ) выбирается тот канал, в котором апостериорная вероятность максимальна. Соответствующее значение величины Яу- принимается за
оценку Xj параметра полезного сигнала.
На демодулятор подаются опорные сигналы от ГОС и тактовые импульсы от ГСВС.
ГОС запускается входным сигналом и создает опорные сигналы со всемозможными значениями параметра X. ГСВС синхронизирует работу демодулятора и селектора каналов, который сортирует полученные оценки по отдельным источникам.
В свою очередь, каждое из взаимно корреляционных устройств схемы рис. 13.3 может быть заменено согласованным фильтром с импульсной характеристикой hj (t) — ис (Яг; Т — г)' Тогда схема демодулятора представляется в фильтровом варианте так, как показано на рис. 13.4.
При практическом построении приемника выбор типа схемы (рис. 13.3 или 13.4) определяется удобством технической реализации. В частности, главная проблема состоит в практической возможности создания опорных сигналов высокого качества или технического построения квазисогласованного фильтра с малыми потерями.
Структура оптимального демодулятора зависит от априорных данных о сигнале. Если в рассмотренном случае демодуляции неизвестна и начальная фаза принимаемого сигнала,
которая представляет собой случайный процесс с равномерным распределением, то демодулятор строят по схеме рис. 13.5. Она образуется из схемы рис. 13.3 заменой коррелятора каждого канала квадратурной схемой, состоящей из двух корреляторов, двух квадраторов (кв) и сумматора |см. рис. 11.5 и формулу (11.23)]. Решающее устройство определяет оценку неизвестного параметра Я; по максимуму значения Q2 (Яг) в данный момент времени.
§ 13.3. Квазикогерентные демодуляторы квантованных ВИМ-и ЧИМ-смгналов
Широкое распространение в системах передачи информации получили квантованные ВИМ-и ЧИМ-сигна-лы, отличительной особенностью которых являются ортогональность и синхронность, позволяющие получить при обработке сигналов в приемнике высокую помехоустойчивость.
При квантовании передаваемого колебания на L уровней квантования ВИМ-сигнал Uj (/), как показано на рис. 13.6, может принимать одно из
возможных положений на интервале периода передачи 10; Т]. При этом импульсный сигнал ut (?), соответствующий одному заданному уровню, ортогонален другому импульсному сигналу Uj (t), соответствующему любому другому уровню в течение периода передачи, т. е.

Длительность каждого импульса ВИМ-сигнала равна TIL, а занимаемая им полоса частот П = L/T. Соответственно выбирают ширину полосы пропускания ЛЧП: П.пчп > LIT.
Структурная схема квазикогерентного демодулятора квантованного ВИМ-сигнала приведена на рис. 13.7. Она состоит из одного высокочастотного коррелятора (ВЧкор), который поочередно обрабатывает каждый ра-диомпульс, и из L видеокорреляторов, каждый из которых реагирует на определенное положение входного сигнала на интервале периода передачи [0, Т].
На ВЧ-коррелятор от первого генератора опорного сигнала (rOQ) подается опорный сигнал, совпадающий по частоте с несущей. Генерато-тор ГОС, построен по принципу импульсной ФАПЧ. Поскольку при этом опорный сигнал несколько отличается по фазе от принимаемого, демодулятор оказывается квазикогерентным.
Каждый видеокоррелятор состоит из перемножителя, интегратора, ключевой схемы (КС), управляемой ГОС2, линии задержки (ЛЗ) и видеоусилителя(ВУ). Генератор ГОС2 запускается маркерным сигналом, выделяемым специальной схемой (ГСВС), и генерирует последовательности видеоимпульсов ult...,«/., соответствующие всем возможным временным положениям сигнала (рис. 13.8). Выходной сигнал каждого видеокоррелятора поступает в решающее устройство и запоминается там до момента принятия решения. Накопительный конденсатор интегратора после окончания сигнала закорачивается с помощью ключевой схемы. Ключевая схема включается задержанным в линии задержки пе-передним фронтом опорного сигнала. После этого коррелятор оказывается подготовленным к обработке следующего сигнала.
Решающее устройство в момент окончания такта Т сравнивает сигналы и выбирает наибольший. Соответственно выбору принимается решение о том, в каком видеокорреляторе имеется сигнал.
Качество работы такого демодулятора определяется вероятностью ошибки РЕ, квторая выражается через вероят-
мость правильного обнаружения ВТ о. Вероятность правильного об наружения данного сигнала, в свою очередь, равна вероятности того, что выходное напряжение видеокоррелятора, в котором имеется сигнал, будет больше выходных напряжений всех остальных видеокорреляторов:

где Рс = U2/2L — средняя мощность сигнала, а Рщ /Плип — спектральная плотность шума на входе демодуля-, тора.
Второе равенство в (13.2) справедливо в предположении, что выходные напряжения различных корреляторов, обусловленные шумами, независимы.
Таким образом, вероятность ошибки зависит от отношения мощности сигнала к спектральной плотности шума и числа уровней квантования (рис. 13.9).
Анализируя работу схемы рис. 13.7, можно определить закон распределения возможных ошибок Р„ш и вычислить среднеквадратиче-ское значение ошибки:
 (13.3)
(13.3)
Здесь U — амплитуда сигнала.
Если значения сигнала распределены по равновероятному закону в интервале значений от— U до U, то среднеквадратическое значение сигнала
 (13.4)
(13.4)
Зак. 1569
Из соотношений (13.2), (13.3) следует, что отношение среднеквадрати-ческого значения сигнала к средне-квадратической ошибке

(13.5)
При проектировании демодулятора задают величину ошибки Р е и так выбирают число уровней квантования, используя формулу (13.2) или рис. 13.9, чтобы максимизировать отношение (13.5). Далее определяют значение величины q0 = РсТ'(Рт /Плчп) и отношение мощности сигнала к мощности шума на входе демодулятора, полагая Плчп = LIT:
PJPm = ЯЛ-
Последняя формула позволяет рассчитать чувствительность приемника

Здесь k — постоянная Больцмана; 7 "с.эф — эффективная шумовая температура приемной системы.
Усиление по мощности ЛЧП определяется уровнем полезного сигнала, необходимого для качественной
работы высокочастотного коррелятора демодулятора (см. рис. 13.7).
Недостаток системы передачи информации при ВИМ — большой уровень перекрестных искажений из-за попадания «хвостов» сигналов соседних каналов в каждый из каналов. Для устранения перекрестных искажений расширяют полосу пропускания ЛЧП. Так, если уровень перекрестных искажений не должен превышать 1 %, то ширину полосы выбирают из условия Плчп «50/Т. При такой широкой полосе уменьшается отношение сигнал/шум на входе демодулятора и тем самым помехоустойчивость приема. Поэтому иногда для устранения влияния соседних каналов их средние частоты разносят на \1Т Гц одна от другой. При этом выходное напряжение коррелятора данного канала за счет наличия сигнала в смежном канале будет равно нулю, так как

JV = 1,2..... L.
Квантованные ЧИМ-сигналы более удобны с точки зрения устранения взаимного влияния каналов, так как здесь сигналы разнесены по частоте. При квантованной ЧИМ квантованные уровни кодируются посредством серии отрезков высокочастотных колебаний длительностью Т, частоты которых разнесены относительно друг
друга на 1/Т Гц. Такие сигналы ортогональны, поскольку
Структурная схема демодулятора квантованных ЧИМ-сигналов приведена на рис. 13.10. Это многоканальный высокочастотный коррелятор, в каналах которого опорные сигналы отличаются по частоте на 1/Т Гц, т. е. «0njv= U sin |(о)0 + 2nN/T)t+ + q >A,J, N = 0,1, 2..... L~l.
Генератор ГОС строится по схеме синтезатора частот и работает от принимаемого сигнала.
С целью упрощения схемы ГОС в передаваемый сигнал иногда включают дополнительный пилот-сигнал — непрерывный сигнал частотой f„c — = М/Т(М > L). Пилот-сигнал выделяется с помощью системы ФАПЧ, а ГОС строится как делитель частоты.
Для временной синхронизации в приемнике предусматривается генератор ГСВС. Он управляет ключевыми схемами, установленными на выходе корреляторов, которые в момент окончания такта t =Т закорачивают интеграторы, подготавливая их к работе на следующем такте. В решающем устройстве в момент окончания каждого такта принимается решение о переданном уровне.
Ширина полосы частот, занимаемая квантованным ЧИМ-сигналом, так же как и квантованным ВИМ-сиг-налом, П = LIT Гц. Соответственно выбирают ширину полосы ЛЧП.
При принятом способе приема квантованных ВИМ- и ЧИМ-сигналов качество работы их оказывается одинаковым и описывается соотношением (13.2).
§ 13.4. Квазикогерентный приемник КИМ-сигналов
При кодоимпульсной модуляции передаваемый сигнал дискретизиру-ется во времени, квантуется по амплитуде и каждое квантованное его значение Х1(- (рис. 13.11, а) передается
кодовой группой двоичных символов Хи =(aix, ai2, oik)- Здесь К. — число двоичных символов, которое определяет число уровней квантования L = 2К.
На рис. 13.11, а показаны два сообщения A,j и Х2, которые дискрети-зируются во времени с периодом отсчетов Т и квантуются по амплитуде на восемь уровней, каждый из которых может быть представлен тремя двоичными символами (А^ = 3). На рис. 13.11, б показаны кодовые группы символов для первых отсчетов Яц = 4 и Х21 *= 2. Эти символы 100 и 010 представлены на рисунке в виде импульсов UM положительной и отрицательной полярностей.
Группа символов, передающая значение одного отсчета, называется словом, а группа слов, передающих значения отсчетов для всех сообщений в течение интервала времени длительностью Т, — кадром.
Для различения кадров в конце каждого из них передается маркерный сигнал в виде группы символов, существенно отличающихся от всех возможных передаваемых комбинаций. Обычно это «слово» большей длины тм > т, чем «слово» каждого отсчета (см. рис. 13.11, а).
При двоичной КИМ по радиоканалу передаются последовательно во времени сигналы «„ (г), их (t), соответствующие двоичным цифрам ац = 0, aih = 1. Эти сигналы образуются с помощью двоичной амплитудной, частотной или фазовой манипуляции. На рис. 13.11, в показаны КИМ-ЧМ-сигналы, соответствующие передаваемым словам 100 и 010.
Структурные схемы радиоприемников КИМ-сигналов строят как квазиоптимальные, в которых для демодуляции используются опорные сигналы, создаваемые в самом приемнике.
Типовая структурная схема многоканального квазиоптимального приемника КИМ-сигналов приведена на рис. 13.12. Она состоит из линейного тракта (ЛТП), демодулятора (Д), регенератора двоичных сигналов (Р) и
селектора каналов (СК), на выхода) которого устанавливаются преобра зователи код — напряжение (ПКН) если выходные сигналы преобразу ются в аналоговую форму. Устройст ва оценки частоты и фазы несущего, колебания (УОЧФ) представляют собой системы частотной и фазовой синхронизации. Устройство оценки временных интервалов — генератор сигналов временной синхронизации ГСВС предназначено для выделения сигналов синхронизации символов, слов и кадров.
При построении линейного тракта многоканального приемника КИМ-сигналов необходимо учитывать перекрестные искажения, вызванные попаданием сигнала одного канала в другой. Перечислим причины возникновения этих искажений:
несовершенство ключей селектора каналов, проявляющееся в просачивании сигнала через закрытый ключ;
недостаточное быстродействие ключей, т. е. конечная скорость их включения и выключения;
конечная полоса пропускания каскадов приемника;
изменение группового времени запаздывания, вносимое цепью, через которую проходит сигнал.
Среди этих причин наибольшее влияние на искажения оказывает ограничение полосы пропускания каскадов, из-за которого происходит замедление нарастания и спадания каждого импульса, так что «хвост» переходного процесса попадает в соседний канал. Поэтому полосы пропускания линейного тракта многоканального импульсного приемника выбирают в соответствии с характером сигнала и заданным уровнем перекрестных искажений (обычно требуемое ослабление сигналов в сос

