




§ 14.1. Структурная схема приемника дискретных сигналов
Известно, что передаваемые сообщения (например, печатный текст, телеграфное или телетайпное сообщение и др.) могут быть представлены дискретными последовательностями. Элементы этих последовательностей выбирают из некоторого конечного множества символов. В системе передачи информации каждому символу приводится в соответствие определенный сигнал. Если алфавит содержит два символа (или L символов), то такие системы называются двоичными (или L-ичиымн) дискретными системами передачи.
Для передачи сообщения по радиоканалу излучаемое колебание модулируется путем изменения одного из его параметров. В двоичных системах модулируемый параметр может принимать одно из двух дискретных значений. Такая модуляция называется двоичной манипуляцией.
В зависимости от параметра, который подвергается манипуляции, различают следующие сигналы:
амплитудно-манипули рованный (АМн) сигнал с пассивной паузой (рис. 14.1, а):
ис1 (г) = U sin сос t при 0 < / < Т,
если передается «1»;
мсо(0 = 0, если передается «О»;
частотно-манипулированный (ЧМн) сигнал (рис. 14.1, б):
"ci (О = U sin «! t при 0 < г; < Т,
если передается «1»;
"со (0 = U sin со2 t,
если передается «О»;
фазоман и пул и рованный (ФМн) сигнал (рис.. 14.1, в):
исЛ (г) = U sin со(, (t при 0 < / < Т,
если передается «1»;
uc0{t) = U sin (сос t+ П), если передается «О».
На рис. 14.1 показаны сигналы соответствующие передаваемой по ка налу связи последовательности чисе.) 101101.
Основной особенностью двоично манипулированных сигналов явля ется широкая полоса спектра. 3; счет расширения полосы пропуска ния достигается высоконадежна} передача информации в условиях силь ной интерференции, помех или много лучевого распространения.
Обобщенная структурная схем; радиоприемника двоичных дискрет ных сигналов представлена н; рис. 14.2 в виде двух основных бло ков: линейной части приемник; (ЛЧП) и демодулятора (ДМ). В ЛЧГ смесь принимаемого сигнала с шумол
переносится в удобный для обработки диапазон частот и предварительно фильтруется. Предполагается, что эти преобразования не влияют на относительные уровни сигнала и шума, их форму и статистику. Там же реализуется требуемая избирательность по различным каналам приема и производится усиление сигнала до уровня, необходимого для нормальной работы демодулятора. В ЛЧП обычно используются целесообразные для качественного приема системы автоматической регулировки усиления (АРУ) и частоты (ЧАПЧ или ФАПЧ).
Демодулятор преобразует последовательность высокочастотных сигналов в видеосигналы, которые подаются на решающее устройство (РУ). Последнее принимает решение о том, какой из известных символов был передан в течение данного интервала времени Т. Для фиксации тактовых интервалов в схеме приемника применяется генератор сигналов тактовой синхронизации (ГСТС).
§ 14.2. Квазикогерентные демодуляторы двоично-манипулированных сигналов
Демодулятор двоичных сигналов может быть когерентным, квазикогерентным или некогерентным в зависимости от условий работы приемника. Если все параметры принимаемого сигнала известны в месте приема, то демодулятор строится по корреляционной схеме и называется когерентным (см. § П.2). Для построения когерентных демодуляторов необходи-
мо знание всех параметров сигнала, включая начальную фазу. Однако на практике бывает известна точно только несущая частота сигналов ис1 (t) и «с0 (/), а начальная фаза известна с некоторой погрешностью.. Последняя определяется ошибкой системы ФАПЧ, с помощью которой в приемнике восстанавливается опорный сигнал из принимаемой смеси сигнала с шумом. Демодулятор, у которого опорный сигнал образуется с помощью системы ФАПЧ, называется квазикогерентным.
Квазикогерентные демодуляторы* ФМн-сигналов. Квазикогерентные демодуляторы ФМн-сигналов строят по корреляционному типу и различаются схемами устройств формирования опорного напряжения (УФОН). Одна из первых схем УФОН была предложена советским ученым А. А. Пис-толькорсом в 1933 г. (рис. 14.3). УФОН состоит из удвоителя частоты, с помощью которого из фазоманипули-рованного колебания образуется не-модулированное колебание. Оно фильтруется узкополосным фильтром ФВЧ, для уменьшения уровня помех. Затем частота колебания делится на два в делителе частоты, снова фильтруется фильтром ФВЧ2 и через фазовращатель подается на коррелятор (Кор) как опорное колебание с малым уровнем помех. Фазовращатель компенсирует дополнительные фазовые сдвиги в тракте преобразования сигнала. Качество УФОН определяется «чистотой» опорного колебания, которая зависит от отношения ширины полос ФВЧ1 и УПЧ. Однако недостаточная стабильность сигнала промежуточной частоты приемника не позволяет сужать полосу ФВЧ]. Поэтому пассивный узкополосный фильтр заменяют следящим фильтром типа ФАПЧ, отслеживающим изменения промежуточной частоты. Такая схема была предложена советским ученым В. И. Сифо-ровым в 1937 г. (рис. 14.4). Здесь
* В данном параграфе использованы материалы Н. Н. Белоусова и В. Е. Марти-росова
фильтрация шумов опорного канала производится системой ФАПЧ, работающей на удвоенной частоте. Существуют различные варианты этой схемы. Так можно построить ГУН на удвоенной частоте, а затем использовать делитель частоты для образования опорного сигнала. Можно также применить смеситель, на который подается входной сигнал удвоенной частоты 2/0 и сигнал ГУН с частотой /0. Тогда выходной сигнал смесителя с частотой /0 будет подаваться на фазовый дискриминатор ФАПЧ.
В 1956 г. американским ученым Д. Костасом была предложена схема квазикогерентного демодулятора (рис. 14.5), состоящего из двух корреляторов, на которые опорные сигналы подаются в квадратурах. Манипуляция устраняется в перемножителе, на его выходе установлен узкополосный фильтр ФНЧ2, фильтрующий шум опорного канала. Техническая особенность схемы состоит в том, что перемножитель работает на постоянном токе. При демодуляции ФМн-сигналов на входе демодулятора устанавливается ограничитель, устраняющий влияние изменений амплитуды на работу схемы. Демодулирован-ный сигнал снимается с выхода одного из корреляторов. Схема Костаса может применяться также для демодуляции АМн-и АМ-сигналов.
На рис. 14.6 приведена схема квазикогерентного демодулятора ФМн-сигналов, предложенная советским ученым В. М. Каршиным в 1967 г. Здесь опорный сигнал образуется из входного сигнала в реверсивном модуляторе (РМ), в котором устраняется модуляция. На реверсивный модулятор подается входной высокочастотный ФМн-сигнал и выходной сигнал в виде последовательности положительных или отрицательных видеоимпульсов. Таким образом, в модуляторе замыкается цепь обратной связи, поэтому схема рис. 14.6 называется также демодулятором с обратной связью по решению. Далее выходной сигнал модулятора фильтруется от шумов системой ФАПЧ, с выхода ко-
торой гармонический опорный сигна/ подается на перемножитель. На входе демодулятора установлен ограничитель (01), ослабляющий влияние изменений амплитуды на работу У ФОН На высоких промежуточных частотах ограничители обычно работают недостаточно эффективно. Поэтому £ УПЧ приемника ФМн-сигналов не обходимо применять высокоэффектив ную систему АРУ.
В последнее время предложень адаптивные квазикогерентные демодуляторы, которые могут работать без системы АРУ и ограничителя, об ладая при этом высокими качествен ными показателями. Схема одного и; вариантов адаптивного демодулятор* ФМн-сигналов приведена на рис. 14.7 Она состоит из двух частей: генерато ра опорного сигнала (ГОС) и адап
тивного фильтра, в который входит демодулятор, охваченный дополнительной обратной связью. Сигнал со снятой в РМ модуляцией поступает на ГОС. Опорный сигнал подается на демодулятор через цепь обратной связи, образованной РМ, вычитающим устройством, УНЧ, иеремножи-телем. В этой цепи сравниваются амплитуды сигналов со снятой модуляцией и опорного. При большом усилении в цепи амплитуды этих сигналов оказываются примерно одинаковыми при изменении уровня входного сигнала в широких пределах. Цепь работает как быстродействующая АРУ (ширину полосы пропускания ее выбирают большей ширины спектра сигнала). Она стабилизирует уровень сигнала на входе ГОС. За счет этого уменьшается влияние замираний входного сигнала на величину установившейся фазовой ошибки, вызванной начальной расстройкой ГОС.
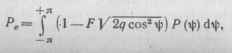
Качество квазикогерентных демодуляторов оценивают вероятностью ошибки Ре посимвольного приема ФМн-сигнала. В рассмотренных демодуляторах фаза опорного колебания фоп — случайный процесс, поэтому можно записать:
(14.1)
Здесь Р (ф) — плотность распределения вероятностей фазового рассогласования ф; фс — фаза принимаемого сигнала; Э = <72772 — энергия сигнала на интервале длительности посылки [0; Г].
В случае малой дисперсии фазового рассогласования (D^ <^ 1) плотность распределения Р (ф) аппроксимируют законом нормального распределения:

где т$ — среднее значение фазы опорного колебания; А„ — начальная расстройка частот принимаемого и опорного колебания; Ау — ширина полосы удержания системы ФАПЧ; qx — отношение сигнал/шум в полосе ФАПЧ.
Обычно ширину полосы пропускания ЛЧП для ФМн-сигналов выбирают большей, чем при согласовании длительности импульса с шириной полосы (12.2), (12.3), для уменьшения уровня межсимвольных искажений, а именно: П0_7 = б/Г. При этом условии среднее значение и дисперсия фазы опорного колебания равны:
для схем Сифорова и Костаса
для схемы Каршина

Здесь Пш — шумовая полоса системы ФАПЧ.
На рис. 14.8 приведены кривые, характеризующие помехоустойчивость адаптивного демодулятора (а) и демодулятора Каршина (б), рассчитанные по формулам (14.1) — — (14.4). Для сравнения на рисунке приведены кривые для когерентного демодулятора (ip = 0).
Особенностью квазикогерентных демодуляторов ФМн-сигналов является возможность «негативного» приема, возникающего за счет того, что при любом способе восстановления опорного сигнала возможны случайные скачки фазы сигнала опорного гетеродина на ± 180е. Это вызвано тем, что опорный гетеродин синхронизируется принимаемым сигналом, в котором фаза манипулируется на 180° в соответствии с передаваемой информацией. Поэтому у гетеродина имеется два устойчивых состояния равновесия и переброс его из одного состояния в другое может быть вызван случайной комбинацией нулей
или единиц передаваемой информации или принимаемым шумом.
Широко распространенным способом устранения этого явления служит применение относительной фазовой манипуляции (ОФМн), предложенной в 1954 г. советским ученым Н. Р. Петровичем. Она используется в телефонии, телеграфии и высокоскоростных системах передачи информации, таких, как радиотелеметрия, передача изображений и т. д. Суть способа состоит в том, что передаваемая информация кодируется не абсолютным значением фазы каждого элемента сигнала, а разностью фаз между последовательными элементами. При таком способе передачи началом отсчета фазы каждой очередной посылки является фаза предыдущей посылки. Можно условиться, что при передаче «1» фаза посылки ОФМн-сигнала остается такой же, как у предыдущей посылки, а при передаче «0» меняется относительно предыдущей посылки. Тогда соответствие между исходным сообщением и ФМн-сигналами выглядит так, как показано в первых трех строках табл. 14.1.
Квазикогерентный демодулятор ОФМн-сигналов строят по схеме рис. 14.9. Решение о том, какой символ был передан, принимается после сравнения полярностей огибающей принятой посылки с предыдущей (способ «сравнения полярностей»). Решающее устройство демодулятора состоит из элемента памяти в виде ли-
Таблица 14.1
| 1. | Исходное сооб- | |||||||||||||
| щение | ||||||||||||||
| 2. | ФМн-сигнал | "ci | "со | "ci | "со | "со | «С1 | "С1 | "со | "со | "со | «С1 | "ci | "ci |
| 3. | ОФМн-сигнал | "ci | "со | "со | «Ci | "со | "со | "со | «С1 | «С1 | "со | "со | "ci | "ci |
| 4. | ГОС | «С1 | "ci | «С1 | «С] | "ci | "ci | "со | "со | "со | "со | "со | "со | "со |
| 5. | (f(Ugj) | л | л | л | л | л | л | л | л | |||||
| 6. | f(Ugj)— | |||||||||||||
| — <P("^--i) | л | Я | л | л | л | л | л | л | л | |||||
| 7. | Демодулиро-ванный ОФМн- | |||||||||||||
| сигнал | ||||||||||||||
| 8. | Демодулиро-ванный ФМн- | |||||||||||||
| сигнал | I |
Негативный прием
нии задержки (ЛЗ) с т3 — Т и схемы совпадения (СС). При совпадении полярностей в момент времени t — Т решающее устройство фиксирует наличие «1» в противном случае — «0».
Принципиальная особенность этого демодулятора состоит в том, что скачок фазы сигнала опорного гетеродина (ГОС) приводит лишь к появлению локальной ошибки в один или два символа в отличие от демодулятора ФМн-сигнала (см. рис. 14.5), когда перескок фазы ГОС вызывает негативную работу демодулятора. При приеме ОФМн-сигнала ошибка в передаче символа возникает в момент перескока фазы ГОС, как показано в столбце 7 таблицы. В последующие моменты времени (столбцы 8, 9, 10) ошибки не возникает, так как демодулятор реагирует на разность фаз между последовательными посылками, а она не зависит от абсолютной фазы
ГОС. При приеме ОФМн-синала из-за шума возможно появление парных ошибок, как показано в столбцах 11, 12 таблицы. В момент времени, соответствующий столбцу 11, из-за шума посылка сигнала ис1 была принята как сигнал ис0 (строка 3, столбец 11 таблицы). Это привело к появлению парной ошибки на выходе (строка 7, столбцы 11, 12).
Для вычисления вероятности ошибки при приеме ОФМн-сигнала необходимо знать совместную плотность вероятности ошибок соседних посылок. Если одна из посылок будет принята ошибочно, то сравнение полярностей даст неверный результат. Если же ошибочно будут приняты обе соседние посылки, то принятое решение будет правильным. Поэтому вероятность ошибки в когерентном демодуляторе ОФМн-сигналов определяется вероятностью того, что одна из соседних посылок будет принята ошибочно. Можно показать, что при независимости ошибок в случае приема соседних посылок эта вероятность

Квазикогерентный демодулятор АМн-сигналов. Квазикогерентный демодулятор двоичных АМн-сигналов с пассивной паузой строят по корреля-
ционной схеме (рис. 14.10). Создать точную копию принимаемого полезного сигнала в приемнике сложно. Один из возможных способов создания опорного сигнала состоит в использовании системы импульсно-фазо-вой автоподстройки частоты, работающей от принимаемых импульсов. УФОН вырабатывает гармонический сигнал с частотой, равной несущей частоте импульсов.
В системе импульсно-фазовой автоподстройки частоты применяется им-пульсно-фазовый детектор (ИФД) и запоминающее устройство (ЗУ) на его выходе. В качестве ИФД используется балансный ФД, а в качестве ЗУ — /?С-цепь. Параметры схемы ФД выбирают так, чтобы постоянная времени заряда конденсатора С была меньше длительности фронта импульса сигнала, а постоянная времени разряда — значительно больше периода следования импульсов. Для выполнения этого условия необходимо применять диоды с большим отношением обратного сопротивления к прямому и выбирать уровень подводимых к ФД напряжений так, чтобы в промежутке между импульсами диоды надежно запирались. Сопротивление нагрузки должно быть большим как по постоянному, так и по переменному току.
РУ в моменты окончания тактов / = пТ, п = 1, 2, 3,... производит сравнение выходного напряжения коррелятора с пороговым и выносит решение о наличии сигнала.
На практике АМн-сигналы применяются редко, так как вероятность ошибок у них больше, чем у сигналов с другими видами модуляции. Кроме того, система связи с АМн-сигналами неэффективна по использованию передаваемой мощности. Известно, что при двухуровневом коде максимальное использование мощности достигается в случае, когда передаваемые сигналы противоположны (ыс] = — ыс„), т. е. когда два идентичных сигнала отличаются только сдвигом фазы на 180°.
Другой недостаток АМн-сигналов заключается в том, что вероятность
ошибки- как при когерентном, так при некогерентном приеме этих сигн лов зависит от отношения мощносп сигнала и шума. Так, при когерен ном приеме и равной вероятности п сылкн и паузы она определяется с отношением

Здесь <7П = U„/2Pm — относительнь порог; q = 0 г/2Рш; U — значеш огибающей сигнала; Un —значеш порогового напряжения.
При фиксированном значении q с; шествует оптимальный порог Unov минимизирующий вероятность Ре ^nopt — И12.
При оптимальном пороге вероят ности ошибок в случае приема сигнг лов нс0, ис1 оказываются разнымр Полная вероятность ошибки при устг новлении оптимального значения пс рога для каждого отношения сигнал к помехе определяется выражение;
Ре = 1 - FVql2.
Для работы приемника с оптималь ным порогом уровень сигнал! стре мятся поддерживать постоянным С этой целью применяют систему АРУ работающую в широком диапазон входных сигналов, а при сравнитель но быстрых замираниях сигнала — специальную систему АРУ, позволя ющую запоминать сигнал и поддер живать в паузах усиление неизмен ным. Используют также устройства автоматически изменяющие порог пр! изменениях уровня сигнала. Это зна чительно усложняет схему приемника По указанным причинам АМн-сигна лы применяются реже, чем ФМн- \
ЧМн-сигналы,— в случаях, когда отношение мощности сигнала к мощности шума велико, для демодуляции используется простой детектор огибающей и главной причиной является стоимость приемника.
Квазикогерентный демодулятор двоичных ЧМн-сигналов. Квазикогерентный демодулятор двоичных ЧМн-сигналов строят обычно по схеме двухканального коррелятора (рис. 14.11). На входе каналов установлены полосовые фильтры ФВЧ^ ФВЧ2, настроенные на различные средние частоты /,, /2. Для каждого из каналов формируется свое опорное напряжение, которое подается на соответствующие корреляторы.
Выходные сигналы корреляторов сравниваются в момент окончания посылок в решающем устройстве РУ, где принимается решение о том, какой из двух символов передавался в момент окончания посылки. Энергии ЧМн-сигналов ис1, ис2 одинаковы, поэтому порог для них всегда равен нулю и не зависит от отношения мощностей сигнала и шума.
При когерентном приеме двоичных ЧМн-сигналов одинаковой энергии вероятность ошибки Ре =
= 1 - FVq.
При квазикогерентном способе приема вероятность ошибки больше, так как сигнальная составляющая уменьшается пропорционально cos Дгр, где — разность фаз опорного и принимаемого сигналов. ЧМн-сигналы применяют чаще, чем АМн-сигналы, так как они не чувствительны к искажениям типа насыщения. Это позволяет генерировать ЧМн-сигналы с большими уровнями мощно-
сти, чем у АМн-сигналов, и облегчает построение радиоприемного устройства.
При сравнении систем ЧМн- и ФМн-сигналов с квазикогерентной обработкой предпочтение обычно отдают ФМн-сигналам, поскольку помехоустойчивость у них выше, а техническая реализация проще за счет использования сигналов одной частоты. Однако, как указывалось, при демодуляции ФМн-сигналов возможны перескоки фазы опорного сигнала, приводящие к негативному приему.
§ 14.3. Некогерентные демодуляторы двоично-маиипулироваииых сигналов
Некогерентные демодуляторы применяют тогда, когда оценка начальной фазы принимаемого сигнала неизвестна [16|.
Некогерентный демодулятор АМн-сигналов. Схема некогерентного демодулятора АМн-сигналов с пассивной паузой приведена на рис. 14.12 (см. также рис. 11.9). Он состоит из согласованного фильтра (СФ), выполняемого как квазисогласованный для импульсного сигнала длительностью Т, детектора огибающей (ДО) и порогового устройства (ПУ), которое служит здесь решающим устройством. В качестве ПУ можно применить запертый односторонний ограничитель, открываемый в момент окончания импульса сигнала t = Т, когда принимается решение.
Для уменьшения межсимвольных искажений на выходе детектора устанавливают управляемый выключатель, закорачивающий емкость нагрузки детектора после снятия отсчета в момент времени t = Т + т3. Для увеличения уровня импульса, подаваемого на ПУ после ДО, устанавливают усилитель (ВУ).
При некогерентном приеме АМн-сигналов существует оптимальное значение порога, которое минимизирует вероятность ошибки. При большом отношении сигнал/помеха оптималь-
ное значение порога qaovt = 2-\-q/2, а вероятность ошибки хорошо аппроксимируется выражением
/>. = (1/2)ехр(-<7/4). (14.5)
Некогерентный демодулятор ЧМн-сигналов. Некогерентный демодулятор двоичных ЧМн-сигналов строят по двухканальной схеме (рис 14.13). Каждый канал содержит согласован-
ный фильтр, детектор огибающей и видеоусилитель. Выходные сигналы каналов сравниваются в пороговом устройстве в момент окончания посылки.
При некогерентном приеме ЧМн-сигналов вероятность ошибки
Р, = (1/2)ехр(-?Сф/2). (14.6)
Здесь </ сф — отношение мощности сигнала к мощности помехи на выходе согласованного фильтра, настроенного на частоту принимаемого сигнала.
Поскольку у АМн-сигналов во время паузы энергия не передается, средняя энергия равна половине энергии, определяющей значение <7сф. Поэтому в случае больших отношений сигнал/шум при одинаковых средних энергиях некогерентный прием АМн-и ЧМн-сигналов дает одинаковую помехоустойчивость (14.5) и (14.6). Однако ЧМн-сигналы занимают вдвое большую полосу частот, чем АМн-сигналы. У демодулятора АМн-сигналов необходимо оптимизировать порог для каждого значения отношения сигнал/помеха. Поэтому обычно
отдают предпочтение ЧМн-сигналам. Если несущие частоты сигналов /2 и /х известны неточно, в качестве демодулятора используют (рис. 14.14) частотный детектор (ЧД), высокочастотный фильтр (ВЧФ) на входе ЧД должен иметь симметричную АЧХ |/С(/'ш)|.
Ширину полосы пропускания этого фильтра выбирают из условия

ЧД настраивается на среднюю частоту <1>0 = (&>! + о )о)/2 и регистрирует отклонение мгновенной частоты от среднего значения. Решение о том, какой передается символ, принимается в РУ, построенном как дискриминатор полярности.
Вероятность ошибки при использовании ЧД определяется выражением Рв = (1/2) ехр (— <7Ф), где q$ = = Рс/Рш — отношение мощности сигнала к мощности помехи на входе ЧД.
По сравнению с двухканальным (рис. 14.13) одноканальный демодулятор (рис. 14.14) сложнее в настройке, более критичен к изменению параметров отдельных элементов и узлов. Межсимвольные искажения в нем больше за счет нелинейности дискриминационной характеристики частотного детектора.

Некогерентный демодулятор
ОФМн-сигналов. Некогерентный демодулятор ОФМН-сигналов строят в предположении, что точная информация о начальной фазе отсутствует, а фазовые соотношения между двумя соседними элементами сигнала в процессе приема не изменяются.
Положим, система ОФМн-сигналов построена так, что символу «1» соответствует сигнал ы, (t) = U X X cos ((tit + ф), — Г ■< 0 < 7\ а символу «О» — сигнал
I t/cos(coM-ф), -Г</<0,
un [If — '
I —(/cos(со^ + ф), 0<г< Т,
где ф — неизвестная начальная фаза.
Оптимальный алгоритм некогерентного демодулятора для таких сигналов имеет вид:
символ «О», если
XaXh + YaY b>0, (14.7)
символ «1» — при обратном знаке неравенства. Здесь

где Ф — произвольная начальная фаза гармонического сигнала опорного генератора.
Алгоритм (14.7) может быть реализован различными способами. Наибольшее распространение получила корреляционная схема (рис. 14.15). Выходное напряжение этой схемы пропорционально левой части неравенства (14.7) и решение принимается в соответствии со знаком этого напряжения. При некоторых параметрах ОФМн-сигналов, когда можно снизить промежуточную частоту и построить на ней аналого-цифровой преобразователь, алгоритм (14.7) можно реализовать программными средствами на ЦВМ.
При некогерентном приеме ОФМн-сигналов вероятность ошибки Ре = - (1/2) ехр (— q), q = 3/N0, где Э— энергия одного элемента сигнала длительностью Т.

