




Основная идея метода сил очень проста и может быть рассмотрена на следующем примере.
Пример 4.1. Определить реакцию RB статически неопределимой балки от заданной нагрузки, полагая ее жесткость равной EJ (рис. 4.3, а).
| `MB0 |
| l |
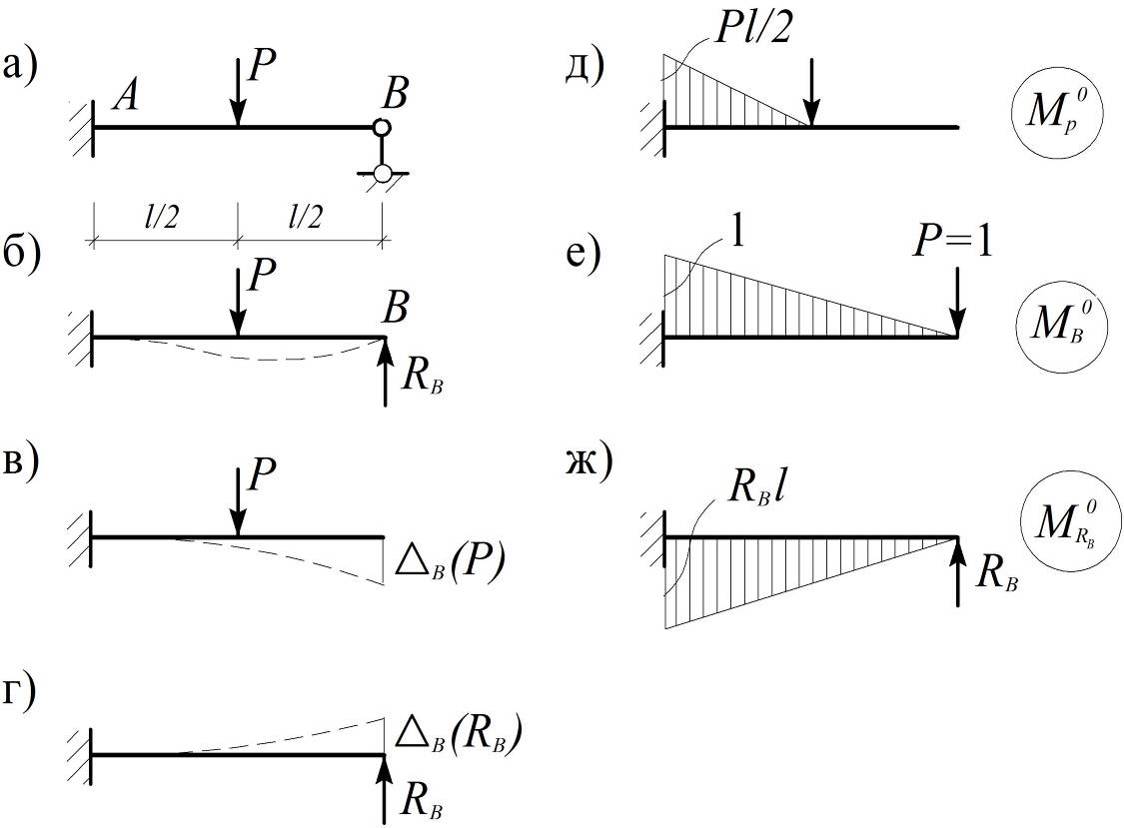
Рис. 4.3
Решение. В соответствии с принципом освобождаемости от связей отбросим опору B, заменив ее неизвестной реакцией RB (рис. 4.3, б).
В полученной системе, которая называется основной (ОС) и может рассматриваться как статически определимая, если считать RB известной, точка B может перемещаться – как от заданной нагрузки, так и от силы RB (рис. 4.3, в – г).
Перемещение точки B под действием силы Р найдем с помощью процедуры, рассмотренной в предыдущей главе: D В = (Mp 0 ´ `MB 0), где Mp 0 – эпюра от заданной нагрузки в основной системе, а `MB 0 – соответствующая эпюра от единичной силы, приложенной в точке B (рис. 4.3, д – е). Перемножая их по правилу Верещагина, получим:
D В (P) = (1/ EJ)[(1/2)×(l /2)×(Pl /2)]×[(5/6)× l ] = 5 Pl 3/48 EJ.
При определении перемещения D В (RB) в качестве нагрузки выступает реакция RB. Поскольку соответствующая эпюра отличается от эпюры `MB 0 только множителем (рис. 4.3, ж), это перемещение можно представить в виде:
D В (RB) = (MRB 0 ´ `MB 0) = (- RB) × (`MB 0 ´ `MB 0) = (- RB) × d BB,
где d BB - перемещение точки B от единичной силы, приложенной в этой точке:
d BB = (`MB 0 ´ `MB 0) = (1/ EJ) [(1/2) × l × l ] × [(2/3) × l ] = l 3/ (3 EJ).
Так как в заданной системе точка B закреплена и не может перемещаться в вертикальном направлении, потребуем, чтобы и в основной системе перемещение точки В от одновременного действия силы P и реакции RB, или, что то же самое, алгебраическая сумма ее перемещений от каждого из этих воздействий равнялась нулю:
D В (P,RB) = D В (P) +D В (RB) =5 Pl 3/48 EJ + (- RB)(l 3)/(3 EJ) = 0,
откуда и найдем искомую реакцию: RB = (5/16) P. ·
В общем случае СНС имеет не одну, а n дополнительных связей, реакции которых выступают в качестве равноправных неизвестных МС и обозначаются X 1, X 2, …, Xn.
Например, статически неопределимая рама на рис. 4.4, а имеет 3 лишние связи, в качестве которых можно выбрать 2 линейных и 1 моментную связь, соответствующие жесткому защемлению в точке В.
Отбрасывая эту опору и заменяя ее действие реакциями X 1, X 2, X 3, получим основную систему, показанную на рис. 4.4, б. Требование, чтобы она вела себя как заданная, означает, что
D1 (X 1, X 2, X 3, P) = 0;
D2 (X 1, X 2, X 3, P) = 0; (4.2)
D3 (X 1, X 2, X 3, P) = 0,
где D i (X 1, X 2, X 3, P) – перемещение точки приложения Xi в направлении Xi от всех перечисленных факторов: X 1, X 2, X 3 и от заданной нагрузки. На основании принципа суперпозиции запишем последние уравнения в виде:
d11 X 1 + d12 X 2 + d13 X 3 + D1 p 0 = 0;
d21 X 1 + d22 X 2 + d23 X 3 + D2 p 0 = 0; (4.3)
d31 X 1 + d32 X 2 + d33 X 3 + D3 p 0 = 0,
где d ij – перемещение точки приложения Xi в направлении Xi от силы Xj = 1, а D ip 0 – перемещение точки приложения Xi в направлении Xi от заданной нагрузки в основной системе.
Напомним, что для балок и рам эти перемещения определяются по формулам:
d ij = (`Mi 0 ´ `Mj 0) = Sò (`Mi 0 × `Mj 0 / EJ) ds, (4.4)
D ip 0= (`Mi 0 ´ Mp 0) = Sò (`Mi 0 × Mp 0 / EJ) ds, (4.5)
где `Mi 0 и Mp 0 – эпюры от Xi = 1 и от заданной нагрузки в основной системе метода сил.
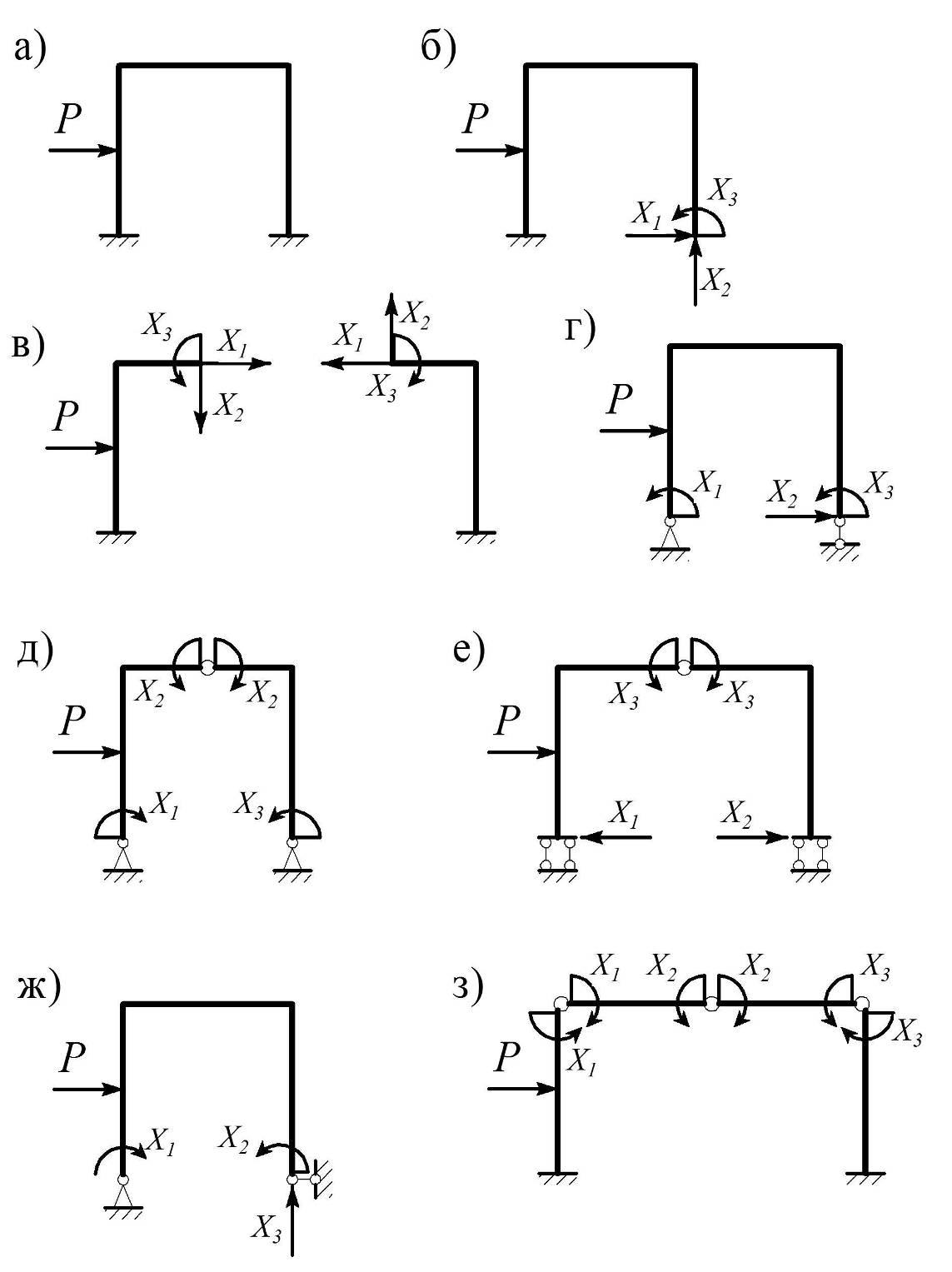
Рис. 4.4
При этом как в силу теоремы Максвелла – (3.10), так и непосредственно из выражения (4.4) следует, что удельные перемещения симметричны:
d ij = d ji.
Уравнения (4.3) называются каноническими уравнениями метода сил. Они справедливы не только для рам, но и для любых статически неопределимых стержневых систем. Каждое из уравнений этой системы имеет геометрический смысл – оно выражает отсутствие перемещения в основной системе в направлении отброшенной лишней связи. В качестве неизвестных выступают силы: X 1, X 2, X 3, откуда и следует название метода.
Для n неизвестных систему канонических уравнений МС можно записать в следующем виде:
S d ij Xj + D ip 0= 0; (i = 1,2,…, n). (4.6)
Решив эту систему уравнений и определив неизвестные X 1, X 2, …, Xn, мы сведем дальнейший расчет СНС к расчету статически определимой основной системы, загруженной заданной нагрузкой и найденными реакциями дополнительных связей.
Рассмотрим еще один пример определения опорных реакций статически неопределимой рамы. Здесь и в дальнейшем изгибные жесткости элементов системы будем считать известными и равными EJ, если в условии не оговаривается иное.
Пример 4.2. Определить опорные реакции рамы (рис. 4.5, а), полагая жесткость EJ постоянной.
Решение.
1. Определяем число лишних связей системы: Л = 3К – Ш = 3×1 – 1 = 2 и выбираем основную систему, отбрасывая две линейные связи шарнира В и заменяя их неизвестными реакциями X 1 и X 2 (рис. 4.5, б).
Система канонических уравнений (4.4) для данной системы примет вид:
d11 X 1 + d12 X 2 + D1 p 0 = 0; (а)
d21 X 1 + d22 X 2 + D2 p 0 = 0.
2. Строим эпюры изгибающих моментов от единичных значений неизвестных и от заданной нагрузки в основной системе (рис. 4.5, в – д).
3. Вычисляем коэффициенты и свободные члены системы (а):
d11 = 8/3 EJ;
d12 = - 4/ EJ;
d22 = 32/3 EJ;
D1 p 0= 2/ EJ;
D2 p 0 = - 8/3 EJ.
4. Решая систему уравнений (а):
(8/3) X 1 – 4 X 2 = - 2;
- 4 X 1 + (32/3) X 2 = 8/3,
находим: X 1 = - (12/14) кН; X 2 = - (1/14) кН.
5) Определяем опорные реакции основной системы от одновременного действия распределенной нагрузки и найденных неизвестных:
S MA = 0; _ MA = 3/7кНм;
S X = 0; _ XA = - 8/7кН;
S Y = 0; _ YA = 2/7кН.
Одновременно эти реакции вместе с найденными ранее X 1 и X 2 дают ответ на вопрос, чему равны опорные реакции заданной статически неопределимой рамы (рис. 4.5, е):
MA = 3/7кНм; XA = - 8/7кН; YA = 2/7кН; XB = - 6/7кН; YB = - 1/14кН. ·
Примечания
1.Термин «основная система» применяют как в отношении системы, полученной из заданной устранением лишних связей и заменой их неизвестными реакциями, так и для системы, полученной формальным отбрасыванием этих связей.
2. Из формул (4.4) и (4.5) следует, что d ij при i ¹ j и D ip 0 могут быть меньше, больше или равными нулю. Коэффициенты d ii, лежащие на главной диагонали матрицы системы (4.3), должны быть неотрицательными.
3. Строго говоря, основную систему можно называть статически определимой только после того, как найдены реакции дополнительных связей.
4. При расчете на силовые воздействия решение задачи зависит от соотношения жесткостей отдельных участков рамы, но не от конкретного значения EJ - это следует непосредственно из формулы (4.6).

