




Понятие вектора. Линейные операции над векторами. Координаты вектора
Величины, характеризующиеся только числовым значением (масса, объем, плотность, стоимость и другие), называются скалярными.
Величины, характеризующиеся и числовым значением, и направлением (сила, скорость, момент силы и другие), называются векторными.
Определение
Вектор – это направленный отрезок, на котором определены операции сравнения сложения и умножения на вещественное число. Векторы обозначаются так: a,  ,
,  ,
,  .
.
(Рис. 2.1.1)

| 
| 
|
| Рис. 2.1.1 | Рис. 2.1.2–а | Рис. 2.1.2–б |
Определение
Модуль (длина) вектора обозначается так: | a |, b,  .
.
Определение
Векторы, лежащие на одной или на параллельных прямых, называются коллинеарными.
Определение
Векторы равны тогда и только тогда, когда они:
1. коллинеарны;
2. одинаково направлены;
3. имеют равные длины.
 .
.
Вектор можно произвольно переносить параллельно самому себе, помещая его начало в любую точку пространства.
Вектор, длина которого равна нулю, называется нулевым. Нулевой вектор не имеет определенного направления.
Определение
Векторы, лежащие в одной или в параллельных плоскостях, называются компланарными. (Рис. 2.1.2–а и 2.1.2–б).
Линейные операции над векторами
1. Сложение векторов.
Определение
Суммой двух векторов a и b называется вектор c = a + b, начало которого совпадает с началом вектора a, а конец – с концом вектора b при условии, что начало вектора b совпадает с концом вектора a (рис. 3–а). Это правило сложения векторов называется еще “ правилом треугольника ”.

|

|
| Рис. 2.1.3–а | Рис. 2.1.3–б |
Вектор c = a + b можно построить также по “ правилу параллелограмма ”: в точке O совместим начала векторов a и b и на этих векторах, как на сторонах, построим параллелограмм. Вектор, совпадающий с диагональю этого параллелограмма с началом в точке O, и является вектором c (рис. 2.1.3–а).
Сумма векторов обладает как переместительным свойством (рис. 2.1.3–б):
| a + b = b + a | (2.1.1) |
так и сочетательным (рис. 2.1.4):
| (a + b) + c = a + (b + c). | (2.1.2) |

|
| Рис. 2.1.4 |
Подобно построению суммы трех векторов можно построить сумму любого конечного числа векторов.
2. Умножение вектора на число
Определение
Произведением вектора a на число l называется вектор c = l a, удовлетворяющий следующим условиям:
1. 
 ;
;
2.  a коллинеарен вектору a;
a коллинеарен вектору a;
3.  , если
, если  > 0 и
> 0 и  , если < 0.
, если < 0.
Определение
Вектор  называется противоположным вектору
называется противоположным вектору  .
.
Можно убедиться, что произведение вектора на число обладает следующими свойствами:



| (2.1.3) |
Определение
Вектор, длина которого равна единице, называется единичным.
Определение
Вектор  , имеющий длину, равную единице
, имеющий длину, равную единице  и параллельный вектору , называется ортом вектора .
и параллельный вектору , называется ортом вектора .
Из определения умножения вектора на число следует, что  , т.е. каждый вектор равен произведению его модуля на орт (единичный вектор того же направления).
, т.е. каждый вектор равен произведению его модуля на орт (единичный вектор того же направления).
3. Вычитание векторов.
Определение
Разностью векторов a и b называется такой вектор c = a – b, сумма которого с вычитаемым вектором b дает вектор a (рис. 2.1.5–а).
 . .
| (2.1.4) |
Если на векторах a и b построить параллелограмм, то одна из диагоналей совпадает с суммой a + b, а другая – с разностью a – b (рис. 2.1.5–б).
Определение
Углом между векторами a и b называется наименьший угол 
 , на который надо повернуть один из векторов до его совпадения со вторым (рис. 2.1.6).
, на который надо повернуть один из векторов до его совпадения со вторым (рис. 2.1.6).

|
| Рис. 2.1.6 |
Проекция вектора на ось
Пусть даны в пространстве вектор  и ось l. Точки M1 и N1 являются проекциями на ось l точек M и N (рис. 2.1.7).
и ось l. Точки M1 и N1 являются проекциями на ось l точек M и N (рис. 2.1.7).
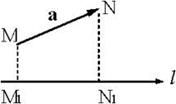
Рис. 2.1.7
Определение
Проекцией вектора на ось l называется число, равное длине вектора  , лежащего на этой оси, если параллелен l, и длине вектора
, лежащего на этой оси, если параллелен l, и длине вектора  взятой со знаком “минус”, если антипараллелен l.
взятой со знаком “минус”, если антипараллелен l.

| (2.1.5) |
Проекция вектора на ось обладает следующими свойствами:
 , где , где  – угол между – угол между  и l, и l,


| (2.1.6) |
Способы задания вектора
Пусть в пространстве задана прямоугольная система координат. Положение точки M (рис. 2.1.8) определяется с помощью координат x, y и z: M(x, y, z).

|
| Рис. 2.1.8 |

| (2.1.7) |
Определение
Вектор  называется радиус–вектором точки M.
называется радиус–вектором точки M.
На каждой оси координат выберем единичный вектор, направленный также, как и ось. Обозначим эти векторы соответственно i, j, k. Совокупность этих векторов называется базисом декартовой (прямоугольной) системы координат.
а) Задание вектора его координатами.
Определение
Координатами вектора a называются его проекции на координатные оси.

| (2.1.8) |
где  ,
,  ,
,  .
.
Из свойств проекций вектора на ось следует, что, если ,
 , то , то
 , ,
 , ,

| (2.1.9) |
Зная координаты вектора a, можно вычислить его длину по формуле

| (2.1.10) |
Векторы и коллинеарны тогда и только тогда, когда их координаты пропорциональны:

| (2.1.11) |
б) Задание вектора его разложением по базису.
Рассмотрим вектор  (рис. 2.1.9).
(рис. 2.1.9).

Рис. 2.1.9
Тогда

| (2.1.12) |
Легко убедиться, что
 , ,  , ,  . .
| (2.1.13) |
Окончательно
| (2.1.14) |
Такое представление вектора называется его разложением по базису i, j, k.
в) Задание вектора координатами его начала и конца.
Пусть  , где
, где  ,
,  (рис. 2.1.10).
(рис. 2.1.10).

Рис. 2.1.10
Векторы и  имеют такие же координаты, как и точки M и N соответственно:
имеют такие же координаты, как и точки M и N соответственно:
 , ,  . .
| (2.1.15) |
Как следует из рис. 2.1.10,  , тогда
, тогда

| (2.1.16) |
Следовательно
 , ,  , ,  . .
| (2.1.17) |
Расстояние между двумя точками определяется по формуле:
 .
.
Таким образом
 . .
| (2.1.18) |
г) Задание вектора его модулем и направляющими косинусами.
Направляющими косинусами вектора называются углы, которые образует этот вектор с осями OX, OY и OZ. Они обозначаются  ,
,  и
и  (рис. 2.1.11).
(рис. 2.1.11).

Рис. 2.1.11
Если известны углы , , , а также модуль (длина) вектора a, то координаты вектора можно найти по формулам:
 , ,  , ,  . .
| (2.1.19) |
Откуда
 , ,  , ,  . .
| (2.1.20) |
Определение
 ,
,  и
и  называются направляющими косинусами вектора a.
называются направляющими косинусами вектора a.
Найдем сумму квадратов этих косинусов:
| (2.1.21) |
Формула  выражает связь между направляющими косинусами.
выражает связь между направляющими косинусами.
Пример
Даны начало M(3,–2,4) и конец N(5,0,3) вектора . Найти координаты этого вектора и его длину.
Решение
 ;
;  ;
;  . Итак, вектор
. Итак, вектор  . Вычислим длину вектора
. Вычислим длину вектора  :
: 

