




Условием динамического приведения масс (моментов инерции) является равенство кинетических энергий приведенной массы mП (приведенного момента инерции IП) и всех масс (моментов инерции) действительного механизма.
Если массы, движущиеся поступательно (рис. 7а), приводят к точке приложения приведенной массы mП, движущейся со скоростью uП, можно записать
 , (1)
, (1)
откуда
 |
 . (2)
. (2)
а) б)
Рис. 7. Условные схемы для приведения:
а) поступательное движение; б) вращательное движение.
Учитывая, что  ,
,  ,
,  , для нашей схемы получим
, для нашей схемы получим
 . (3)
. (3)
Аналогично, для вращательного движения масс (рис. 7б)
 . (4)
. (4)
Если механизм содержит движущиеся поступательно и вращающиеся элементы, массу необходимо выражать через момент инерции или момент инерции через массу.
Например, требуется привести массу груза m, поднимаемого с помощью троса, наматываемого на барабан радиусом R (рис. 8).
Приведенный момент инерции системы

 , (5)
, (5)
приведенная масса системы
 , (6)
, (6)
где n – кратность полиспаста.
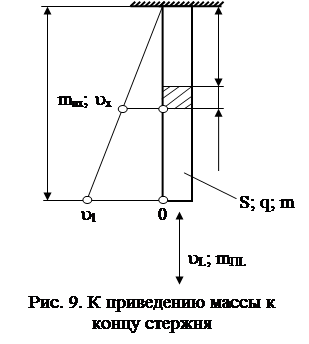
Приведение распределенных (рассредоточенных) масс
Для решения задач динамики целесообразно представлять распределенные массы в виде сосредоточенных в заданной точке элемента. При этом должно выполняться сформулированное в п. 1.3 условие как равенство кинетических энергий приведенной (сосредоточенной) массы и всех элементарных масс, распределенных по длине действительного элемента.
Рассмотрим некоторые примеры приведения распределенных масс.
1.4.1. Стержень постоянного сечения (S=const)
Удлинение части стержня длиной x равно
 , (7)
, (7)
где q – погонный вес стержня;
E – модуль нормальной упругости;
S – площадь поперечного сечения.



 При
При  получим
получим
 . (8)
. (8)
Поскольку из формулы (8)
 , (9)
, (9)
можем записать:
 . (10)
. (10)
Скорость перемещения элемента стержня dx равна
 . (11)
. (11)
Кинетическая энергия элемента стержня длиной dx
 . (12)
. (12)
Кинетическая энергия всего стержня
 . (13)
. (13)
После интегрирования и преобразований получим
 . (14)
. (14)
При приведении распределенной массы стержня m к его концу приведенная кинетическая энергия равна
 . (15)
. (15)
Таким образом, при условии  получим
получим
 . (16)
. (16)
При приведении распределенной массы стержня m к сечению со скоростью ux
 . (17)
. (17)
Из условия  будем иметь для любого сечения стержня
будем иметь для любого сечения стержня
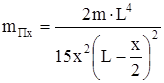 . (18)
. (18)
Консольная балка
 При колебаниях балки момент изгиба в сечении X равен
При колебаниях балки момент изгиба в сечении X равен
 , (19)
, (19)
а уравнение её упругой линии
 . (20)
. (20)
Интегрируя дважды выражение
 ,
,
получим
 . (21)
. (21)
При x=L имеем
 . (22)
. (22)
Тогда формулу (21) можно представить в виде
 . (23)
. (23)
Кинетическая энергия элемента dx равна
 , (24)
, (24)
а всей балки
.
Из условия  получаем
получаем
 , (25)
, (25)
а для любого сечения балки при 
 . (26)
. (26)

