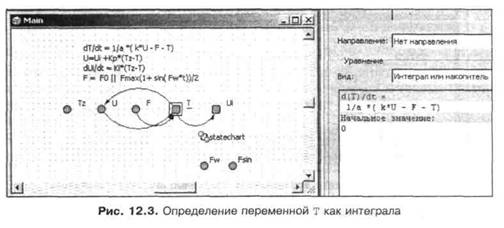
Для моделирования системы управления можно в поле редактора определить все переменные и параметры этой системы, и для каждой переменной в соответствующем поле окна свойств этой переменной записать правую часть определяющего ее уравнения. Для нашей системы управления, описываемой соотношениями:
d(T)/dt = l/a*(k*U-F-T) U = Ui+Kp*(Tz-T) d(Ui)/dt = Ki*(Tz-T)
такая модель Controlsystemo представлена в папке Model Examples\Part IV. Переменные T и Ui определяются как вещественные вида Интеграл, правая часть дифференциальных уравнений записывается в соответствующем поле в виде выражения. Например, для переменной т это выражение имеет вид рис. 12.3 (на желтом фоне в поле редактора здесь представлен комментарий — перечисление функциональных соотношений переменных).
В модели controlsystem0 используются два режима для задания различного поведения внешней среды, определяемой значением параметра f. Переклю-
чение режимов в моделях динамических систем легко осуществляется с помощью стейтчарта. В нашей модели стейтчарт с именем statechart имеет два состояния. В одном состоянии никаких соотношений для f не определено, и, следовательно, эта переменная определена своим постоянным (начальным или текущим) значением. В другом состоянии f определено уравнением F=Fmax* (1+sin(Fw*t)) /2. Переход в это состояние осуществляется, как только логическая переменная Fsin станет истинной (в результате внешнего воздействия).
Использование стейтчартов для переключения моделей позволяет легко строить сложные гибридные модели динамических систем, т. е. такие модели, в которых непрерывное поведение прерывается дискретными событиями, вызывающими изменение поведений.
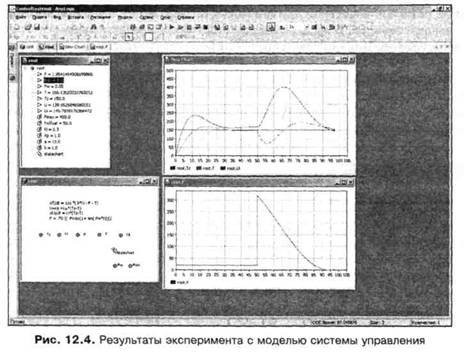
С моделью ControlSystem0 можно выполнять различные эксперименты, меняя ее параметры в окне дерева объектов модели. На рис. 12.4. представлены результаты эксперимента, в котором после запуска модели Controlsystem0 значение параметра Fsin было изменено с 0 на 1 (со значения false на значение true) при модельном времени 50. Это вызвало переключение режима внешней среды.
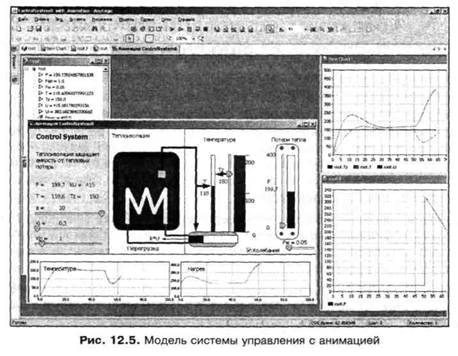
Анимация поведения системы в AnyLogic позволяет более ясно представить процессы, происходящие в системе в их совокупности. Такая анимация для
системы управления добавлена В модели ControlSystem0_with_animation
папки Model Examples\Part IV (рис. 12.5).
В окне анимации динамика системы отражена изменением цвета графических объектов, их позицией и размерами. С помощью флажка  с именем Колебания можно переключиться на режим изменения внешнего воздействия f по синусоидальному закону.
с именем Колебания можно переключиться на режим изменения внешнего воздействия f по синусоидальному закону.
|
|
|
|