




Глава 13. Системная динамика
Глава 14. Дискретно - событийное моделирование
Глава 15. Многоагентные системы
Глава 16. Использование
Различных парадигм при разработке моделей
отя имитационное моделирование — чрезвычайно широкая сфера с огромным количеством прикладных областей, в каждой из которых существуют свои приемы моделирования, здесь можно выделить четыре основные парадигмы моделирования, т. е. четыре основные системы взглядов, подходов и концепций, используемых в качестве каркаса при построении моделей:
□динамические системы,
□ системная динамика,
□ дискретно-событийное моделирование,
□ мультиагентные системы.
За исключением мультиагентного моделирования, три первые парадигмы сформировались более 40 лет назад. За несколько десятилетий эти концепции, фактически, не изменялись, поэтому их часто называют традиционными. Одной из причин стабильности традиционных парадигм моделирования является их удобство для решения проблем моделирования, специфичных для конкретных применений. Другая причина состоит в том, что традиционные парадигмы "заморожены" в программных продуктах, которые были разработаны в 60-х годах прошлого века и до сих пор широко используются в моделировании. Эти выпущенные на рынок продукты препятствуют революционным изменениям парадигм моделирования.
В данной части на примерах построения типичных моделей из упомянутых четырех областей показывается, что с помощью инструмента AnyLogic разработка моделей в соответствии с каждой из перечисленных парадигм выполняется легко и естественно. Потому изучение различных парадигм моделирования для различных классов проблем может быть выполнено в рамках только одного этого инструмента. Более того, AnyLogic предоставляет возможность объединения, смешивания различных методов и стилей моделирования при создании одной модели, чего нет ни в одном современном продукте имитационного моделирования.
|
|

Глава 12
Динамические системы
Динамические системы — это сложные объекты, поведение которых описывается системами алгебраических и дифференциальных уравнений, а также событиями, меняющими либо среду, либо модель, либо даже саму структуру системы. К этому классу относятся системы управления, физические и механические объекты, объекты химической технологии, системы обработки сигналов и т. п.
12.1. Простая динамическая система: система управления бойлером
Рассмотрим в качестве примера классическую динамическую систему, состоящую из двух связанных подсистем: объекта управления и регулятора (рис. 12.1).
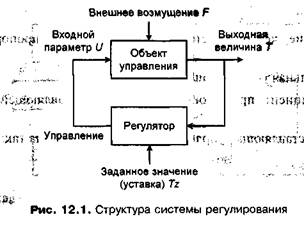
Пусть объектом управления является бойлер, который нагревается до температуры т. Величину температуры т необходимо поддерживать на заданном уровне Tz. Температура бойлера зависит от входного параметра — в нашем случае от мощности тока U, подаваемого на нагревательный элемент бойлера. Объект управления подвергается внешнему возмущению f (f может характеризовать внешнюю температуру или теплоизоляцию), вследствие чего значение выходного параметра т может меняться. Поддержание значения т на заданном уровне Tz есть задача регулятора. Регулятор по разнице заданного и текущего значений выходного параметра (tz-t) формирует величину входного параметра объекта управления — в нашем случае регулируется мощность U, подаваемая на нагревательный элемент.
Уравнения функционирования как бойлера, так и регулятора будем записывать явно, а не с помощью передаточных функций.
Объект управления. Выходная величина т типичного объекта управления описывается уравнением:
dT/dt = 1/а *(k*U - F - Т),
где:
□ a — коэффициент пропорциональности, определяемый параметрами объекта управления (выберем его значение 10);
□ k — коэффициент усиления объекта по управлению (установим его в 1);
□ f — изменяющееся внешнее воздействие (температура окружающей среды или теплоизоляция).
Регулятор можно строить разными способами; мы будем использовать здесь так называемый регулятор с пропорционально-интегральным законом управления (ПИ-регулятор). Выходную величину (управление) регулятора определим так:
U=Ui +Kp*(Tz-T),
где-
□ и — управление, которое состоит из интегральной и пропорциональной
части;
□ Ui — интегральная составляющая управления;
□ Kр- коэффициент при пропорциональной составляющей управления
(=1).
Интегральная составляющая управления может быть задана так:
dUi/dt = Ki*(Tz-T),
где:
□ Ki — коэффициент при интегральной составляющей управления (= 0.3).
Поставим задачу исследовать с помощью модели качество регулирования температуры бойлера в зависимости от соотношений параметров объекта управления и регулятора.

