




При ипользовании для расчета пластин метол Бубнова – Галеркина прогиб пластины задается в виде [4]
 , (4)
, (4)
где Bi - неизвестные коэффициенты, xi(ξ)- характер прогиба пластины в направлении оси ξ, который должен удовлетворять заданным граничным условиям на сторонах пластины ξ=0, ξ=1, а yi(h) характер прогиба пластины в направлении оси h, который должен удовлетворять заданным граничным на сторонах пластины h=0, h=1.
В методе Бубнова - Галеркина функции xi(ξ) и yi(h), которые в дальнейшем называем аппроксимирующими (приближающими), должны удовлетворять всем граничным условиям.
Если взять достаточное число членов ряда n в (4), то можно получить достаточно точное решение задачи методом Бубнова – Галеркина. Однако при большом числе членов ряда прогиба w (4) значительно возрастает трудоемкость решения задачи методом Бубнова – Галеркина. В связи с этим желательно использовать такие способы построения функций x(ξ) и y(h), при которых они достаточно отражают характер прогиба пластины по направлениям осей ξ и h и задачу можно решать в первом приближении, когда [4]
 (5)
(5)
Таким способом построения функций x(ξ) и y(h) является способ, предложенный выдающимся советским ученым членом-корреспондентом АН СССР профессором В.З.Власовым. Суть способа состоит в построении аппроксимирующих функций, удовлетворяющих всем граничным условиям, а также и характеру внешней нагрузки.
Проиллюстрируем данный способ на конкретном примере, Предположим, что надо построить статическим методов Я.З.Власова аппроксимирующие функции х(ξ), у(h) для пластины, изображенной на рис. 3 и имеющей значение параметров μ=0.3 и γ=2.

Рис.3
На рис. 3 и в дальнейшем заменяем пластину ее срединной плоскостью [1+4], штриховкой обозначаем защемленный край пластины, на котором в ноль обращаются прогиб w(ξ,h) и угол поворота сечения w’ξ(ξ,h) ( или w’h(ξ,h)). Пунктиром обозначаем шарнирно-опертый край, на котором в ноль обращается прогиб w(ξ,h) иизгибающий момент Мξ(ξ,h) ( или Мh(ξ,h)). Если край свободен от опорных закреплений, то их обозначения отсутствуют и на краю обращается в ноль изгибающий момент Мξ(ξ,h) ( или Мh(ξ,h)) иприведенная поперечная сила Qξ(ξ,h) ( или Qh(ξ,h)).
Строим статическим методом [1] аппроксимирующую функцию х(ξ).
Граничные условия по оси ξ в пластине следующие: при ξ=1- шарнирный край, т.е. w(0,h)=0 и М’ξ(1,h)=0, при ξ=1 – защемление, т.е. w(1,h)=0 и w’ξ(1,h)=0. Подставляя выражение (5) для w(ξ,h) в формулы для w, Мξ, w’ξ, получим
 (6)
(6)
Преобразуя (6), получаем систему следующих четырех граничных условий
 ,
,  ,
,  ,
,  . (7)
. (7)
Отметим, что приведение условия Мξ(0,h)=0 к условию возможно из-за выполнения условия - шарнирный край.
Рассмотрим вырезанную из пластины элементарную полоску шириной dh как обыкновенную балку и определим для этой балки в соответствии с граничными условиями линию прогибов от заданной нагрузки [1]. Балка изображена на рис.4, а нагрузка является равномерной, т.к.  , т.е.
, т.е.  ,
,  - см. рис.3.
- см. рис.3.
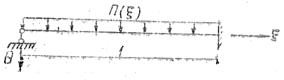
Рис.4
Записываем в безразмерном виде дифференциальное уравнение изгиба балки
 , (8)
, (8)
где  - характер изменения нагрузки по оси ξ.
- характер изменения нагрузки по оси ξ.
Последовательно интегрируем (8) четыре раза:
 (9)
(9)
 (10)
(10)
 (11)
(11)
 . (12)
. (12)
Произвольные постоянные интегрирования С1, С2, С3, С4 определяем из заданных граничных условий (7). Из условия получаем С4=0, а из условия - C2=0.
Для нахождения С1 и С2 используем оставшиеся условия , , приводящие к системе алгебраических уравнений:
 (13)
(13)
Решая (13), находим величины С1 и С2
С1= -3/8, С3=1/48. (14)
Подставляя полученные значения С1, С2, С3, С4 в х(ξ) (13), получаем:
 . (15)
. (15)
Аппроксимирующая функция х(ξ) (15) соответствует граничным условиям в пластинке на сторонах контура ξ=0 и ξ=1 и характеру распределения нагрузки вдоль оси ξ.
Отметим следующее обстоятельство. Нас интересует характер прогиба пластины в направлении оси ξ- амплитуду В прогиба мы найдем в дальнейшем методом Бубнова – Галеркина. В связи с этим выражение (15) для х(ξ) желательно упростить так, чтобы коэффициент при старшей степени ξ был равен единице, т.е. принять
 . (16)
. (16)
Переходим к построению аппроксимирующей функции у(h). Граничные условия по оси h в пластине следующие: при h=0 – шарнирный край, т.е. w(ξ,0)=0, Mh(ξ,0)=0, при h=1- свободный край, т.е. Мh(ξ,1)=0, Q*h(ξ,1)=0. Подставляя выражение (5) для w(ξ,h) в формулы для w, Мh, w’h, Q*h, получим
 (17)
(17)
 .
.
Условия (17) при h=0 можно привести к виду
 ,
,  . (18)
. (18)
Условия же при h=1 не допускают упрощения, т.к. при h=1 на свободном краю пластины у(1)≠0, у”(1)≠0, y’”(1)≠0.
Необходимо обратить внимание на то, что на шарнирном краю пластинки упрощаются, например, из (6) получено (7).
Таким образом, граничные условия по оси h имеют вид:
(19)

 .
.
Отметим, что в граничные условия (19) вошла функция х(ξ) и ее производная х”(ξ), которые меняют свои значения вдоль оси ξ.
К связи с этим возникает необходимость заменить требование равенства нулю Мh и Q*h в любой точке края h=1 условиями равенства нулю суммы работ всех моментов Мh(ξ,1) на углах поворота w’h (ξ,1) и приведенных поперечных сил Qh(ξ,1) на прогибах w(ξ,1) вдоль края пластины h=1. Эта замена называется смягчением граничных условий. В силу принципа Сен - Венана [4] вносимая при смягчении граничных условий погрешность будет сказываться в малой зоне пластины у края h=1.
Таким образом, окончательно после их смягчения граничные условия по оси h принимают вид:
 (20)
(20)
Вырезанная из пластинки элементарная полоска шириной представлена на рис.5.

Рис.5
Следует помнить, что граничные условия для данной балки- полоски отличаются от граничных условий (20) для пластины.
Поперечная нагрузка в пластине изменяется по оси h по линейному закону G(h)=h, поэтому дифференциальное уравнение изгиба рассматриваемой балки-полоски в безразмерном виде.
 . (21)
. (21)
Последовательно интегрируя (21) четыре раза:
 (22)
(22)
 (23)
(23)
 (24)
(24)
 . (25)
. (25)
Произвольные постоянные интегрирования С1, С2, С3, С4 находим из граничных условий (20). Из условия получаем С4=0, а из - С2=0.
Для нахождения С1 и С2 используем два оставшихся уравнения системы (20). Берем х(ξ) в виде (16) и вычисляем входящие в (20) определенные интегралы:


Подставляя в (26) формулы (22) – (25) и решая полученную систему, находим С1=-0.0980, С3=0.0281.
Подставим полученные значения С1, С2, С3, С4 в у(h):
 . (27)
. (27)
Упрощаем выражение для у(h) так, чтобы коэффициент при h5 был равен 1, и получаем
 . (28)
. (28)
Аппроксимирующая функция у(h) (28) соответствует граничным условиям в пластине по оси h и характеру распределения поперечной нагрузки по этой оси.
Рассмотрим возможные пути построения аппроксимирующих функций статическим методом В.З. Власова для пластин, различным образом закрепленных по контуру – рис.6.

Рис.6
На рис. 6а изображена пластина, на сторонах контура которой или жёсткое защемление, или шарнирное опирание. Для таких типов закреплений аппроксимирующие функции  и
и  строятся независимо одна от другой и без смягчения граничных условий.
строятся независимо одна от другой и без смягчения граничных условий.
На рис. 6б изображена пластина, у которой на сторонах контура  и
и  -заделка, на стороне контура
-заделка, на стороне контура  -шарнирное опирание, а на стороне контура
-шарнирное опирание, а на стороне контура  -свободный край. Сначала необходимо построить функцию , затем использовать её для нахождения функции , используя смягчённые на свободном краю пластин при условия и условия при .
-свободный край. Сначала необходимо построить функцию , затем использовать её для нахождения функции , используя смягчённые на свободном краю пластин при условия и условия при .

 (29)
(29)
Для изображённой на рис. 6в пластины сначала необходимо построить функция , а затем найти функцию , используя смягчённые на свободных краях пластины и условия

 (30)
(30)
При построении аппроксимирующих функций следует обратить внимание на то, что степень полинома (или ) зависит от характера распределения нагрузки по оси  или
или  . Если распределение равномерное, то полином (например, (16)) имеет порядок 4, если линейное, то (например, (28))-порядок 5, а при распределении поперечной нагрузки по квадратичной параболе порядок полинома составляет 6.
. Если распределение равномерное, то полином (например, (16)) имеет порядок 4, если линейное, то (например, (28))-порядок 5, а при распределении поперечной нагрузки по квадратичной параболе порядок полинома составляет 6.

