




1. Найдем решение первой системы A 1 · X = B 1. Запишем систему в явном виде:

| (2) |
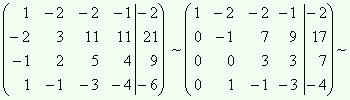
Запишем расширенную матрицу системы и будем делать элементарные преобразования со строками этой матрицы.
 ~
~  ~
~
На первом этапе преобразований в первом столбце, начиная со второй строки, получили, нули. Для этого использовали следующие элементарные преобразования: ко второй строке прибавили первую, к третьей и четвертой строкам прибавили первую, умноженную на (–3).
~  ~
~  ~
~
На втором этапе преобразований получили нули во втором столбце, начиная с третьей строки. Для этого к третьей строке прибавили вторую, умноженную на (–2), к четвертой cтроке прибавили вторую. Затем получили нули в третьем столбце четвертой строки, прибавив к четвертой строке третью. Для удобства дальнейших действий можно вынести из второй строки (–1) и из четвертой - (–2). Чтобы не изменился определитель матрицы A 1, который нам нужно вычислить, вынесенный коэффициент ставим перед матрицей:
2·  .
.
Определитель матрицы, преобразованной к треугольному виду, равен произведению чисел, стоящих на главной диагонали. Это можно показать, если разложить определитель по первому столбцу, получившийся после этого определитель вновь разложить по первому столбцу и т.д.:

Тогда с учетом стоящего перед матрицей коэффициента, | A 1| = 6. Ранг матрицы A 1 равен 4, ранг расширенной матрицы также равен четырем, ледовательно, система имеет единственное решение.
Рассмотрим два метода нахождения решения.
Метод 1. По полученной матрице выпишем преобразованную систему:

из которой последовательно определим значения неизвестных: - (3; –3; –1; 3).
Метод 2. С помощью элементарных преобразований полученную треугольную матрицу коэффициентов приведем к диагональному виду, для этого к третьей строке прибавим четвертую строку, умноженную на 2, ко второй и к первой строкам прибавим четвертую строку. Тем самым в четвертом столбце выше единицы четвертой строки получим нули. Продолжая аналогичные действия, приведем матрицу коэффициентов к диагональному виду:
~  ~
~  ~
~  ~
~
Теперь, разделив первую строку на 3, получаем единичную матрицу коэффициентов
~ 3· 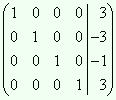 .
.
В выделенном столбце находятся решения исходной системы уравнений, так как полученная расширенная матрица соответствует следующей системе:
x 1 = 3; x 2 = –3; x 3 = –1; x 4 = 3.
Полученное решение необходимо проверить, т.е. подставить в исходную систему (2).
Это удобнее всего сделать, введя матрицу решения X 1 =  ,
,
и умножая матрицу A 1 на X 1 справа. Если система решена верно, то результатом будет матрица B 1.
Действительно A 1 · X 1 = 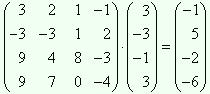 = B 1.
= B 1.
2. Запишем вторую систему A 2 · X = B 2 в явном виде:

По условию A 1 = A 2, т.е. вторая система отличается от первой только правыми частями, и главные определители у них равны, | A 1| = | A 2| = 6. Согласно теореме Крамера система имеет единственное решение, которое можно найти по формулам Крамера:  . Вычислим вспомогательные определители.
. Вычислим вспомогательные определители.
Определитель |Δ1| получается из главного определителя системы | A | заменой первого столбца на столбец правых частей:
 ;
;  .
.
Для вычисления этого определителя проведем предварительные преобразования. Преобразуем определитель |Δ1| так, чтобы в его первой строке на первом месте осталась единица, а на всех остальных местах нули. Для этого ко второму столбцу прибавим первый столбец, умноженный на (–2); к третьему – первый столбец, умноженный на (–1); к четвертому – первый столбец. А затем вычислим полученный определитель разложением его по первой строке:

Получившийся определитель третьего порядка также преобразуем. Вынесем из второго столбца 4, а затем с помощью второго столбца организуем нули на первом и третьем месте первой строки. Для этого к первому столбцу прибавим второй, умноженный на (–13); к третьему столбцу прибавим второй, умноженный на 7. Затем разложим полученный определитель по первой строке и, наконец, вычислим полученный определитель второго порядка:

Следовательно, 
Определитель |Δ2| получается из главного определителя системы | A | заменой второго столбца на столбец правых частей:
| A | =  |Δ2| =
|Δ2| =  .
.
Преобразуем определитель |Δ2| так, чтобы в его первом столбце на первом месте осталось число 3, а на всех остальных местах – нули. Для этого ко второй строке прибавим первую строку; к третьей – первую строку, умноженную на (–3); к четвертому – также первую строку, умноженную на (–3). А затем вычислим полученный определитель разложением его по первому столбцу:
|Δ2| = 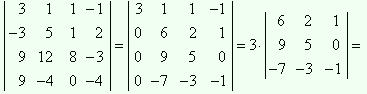
Получившийся определитель третьего порядка преобразуем так, чтобы в третьем столбце на последнем месте стоял ноль. Для этого к третьей строке прибавим первую. Затем разложим полученный определитель по третьему столбцу и, наконец, вычислим полученный определитель второго порядка:

Следовательно, 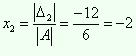 .
.
Определители |Δ3| и |Δ4| вычисляем аналогично, преобразуя и затем раскладывая по первому столбцу.


Откуда 

Мы получили решение второй системы:  или X 2 =
или X 2 =  .
.
Сделаем проверку. A 2· X 2 =  = B 2.
= B 2.
Следовательно, система решена верно.
3. Проведем исследование третьей системы. Запишем систему A 3 · X = B 3 в явном виде:

| (3) |
Проведем необходимые элементарные преобразования над расширенной матрицей.

Определитель матрицы A 3 равен нулю, ранг матрицы A 3 равен 3 (одна нулевая строка в матрице ступенчатого вида), ранг расширенной матрицы равен 4 (нет нулевых строк). Так как ранги матрицы коэффициентов и расширенной матрицы не равны друг другу, то система (3) не имеет решения.
4. Рассмотрим четвертую систему. Запишем систему A 4 · X = B 4 в явном виде:

Проведем необходимые элементарные преобразования над расширенной матрицей:

 .
.
Определитель матрицы A 4 равен нулю, ранг матрицы A 4 равен 2, ранг расширенной матрицы тоже равен 2. Так как ранги матриц равны, то система является совместной; ранг матрицы меньше числа неизвестных, следовательно, система является неопределенной. В преобразованной матрице жирным шрифтом выделен базисный минор. В качестве базисных неизвестных выберем x 1 и x 2 в, качестве свободных – x 3, x 4.
Перепишем полученную систему в виде

и введем x 3 = C 1 є R и x 4 = C 2 є R.
Окончательно получим x 1 = 3 – C 1 + C 2; x 2 = 2 + C 1 + 2 C 2.
Решение неопределенной системы удобно записывать в векторном виде, выделяя фундаментальную систему решений однородной и частное решение неоднородной систем.

| Частное решение неоднородной системы | Фундаментальное решение однородной системы |
Для проверки и здесь удобно воспользоваться умножением матрицы A 4 на матрицу X 4, образованную из указанных выше трех векторов.


В полученной матрице первый столбец должен соответствовать вектору правых частей системы B 4, а два других вектора должны быть нулевые, так как соответствующие решения являются решениями однородной системы уравнений.
Оформление отчета
В отчете по ТР должен быть представлены преобразования расширенных матриц каждой системы. Полученные решения должны быть проверены умножением матрицы коэффициентов на матрицу решений. В конце работы необходимо выписать общий ответ по следующему образцу:
1. Системы 1 и 2 – совместные, определенные.
| A 1| = 6; r (A 1) = r (A 1 | B 1) = r (A 1 | B 2) = 4; 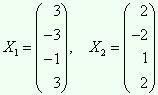 .
.
2. Система 3 – несовместная.
| A 3| = 0; r (A 3) = 3; r (A 3 | B 3) = 4.
3. Система 4 – совместная, неопределенная.
| A 4| = 0; r (A 4) = r (A 4 | B 4) = 2;  .
.

