




Використовуючи знайдені залежності параметрів, побудуємо біфуркаційну множину та розіб'ємо простір параметрів на декілька областей. Використано програму gnuplot.

Рис. 2.4. Біфуркаційна множина системи (2.11)
Типи точок у зонах:
1. (3) — нестійкі вузли, (4) — сідла, (5) — відсутні
2. (3) — нестійкі вузли, (4) — сідла, (5) — присутні
3. (3) — сідла, (4) — сідла, (5) — присутні
4. (3) — сідла, (4) — стійкі вузли, (5) — присутні
5. (3) — сідла, (4) — стійкі вузли, (5) — відсутні
Фазові портрети системи для заданих значень параметрів
Параметри, що належать області 1
Візьмемо  . Особливі точки (2.13) —
. Особливі точки (2.13) — 
 .
.
Особливі точки (2.14) — 
 .
.
Фазовий портрет нелінійної системи (2.11) за заданих параметрах:
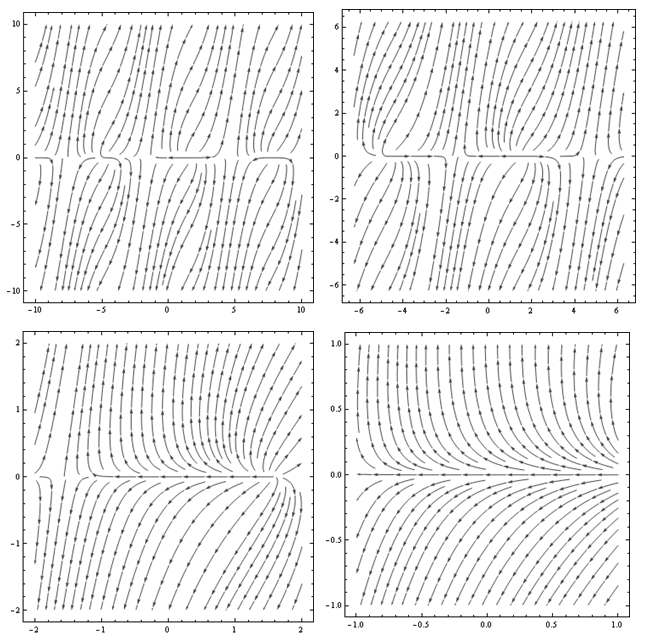
Рис. 2.5. Фазовий портрет системи (2.11) для параметрів із області 1
Параметри, що належать області 2
Візьмемо  . Особливі точки (2.13) — .
. Особливі точки (2.13) — .
Особливі точки (2.14) – .
Особливі точки (2.15) – 
Фазовий портрет нелінійної системи (2.11) за заданих параметрах:
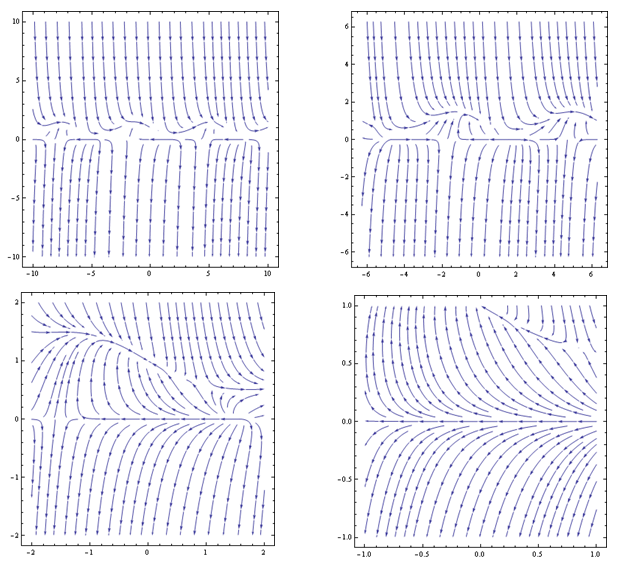
Рис. 2.6. Фазовий портрет системи (2.11) для параметрів із області 2
Параметри, що належать області 3
Візьмемо  . Особливі точки (2.13) — .
. Особливі точки (2.13) — .
Особливі точки (2.14) — .
Особливі точки 2.(15) —  .
.
Фазовий портрет нелінійної системи (2.11) за заданих параметрах:
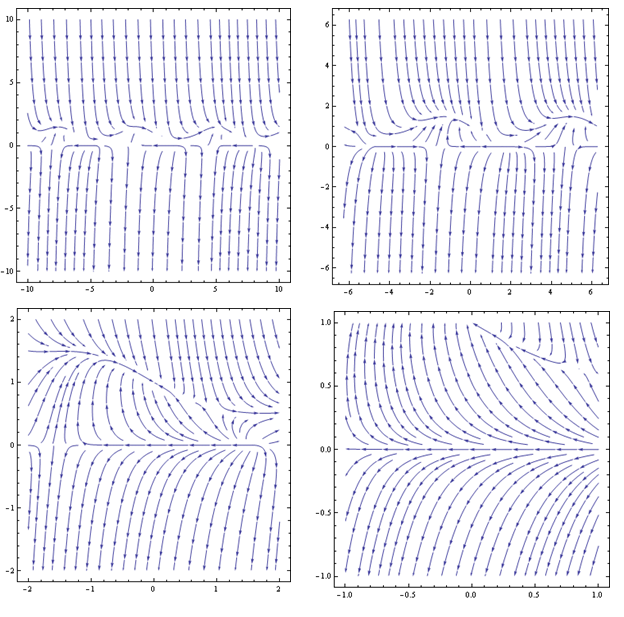 Рис. 2.7. Фазовий портрет системи (2.11) для параметрів із області 3
Рис. 2.7. Фазовий портрет системи (2.11) для параметрів із області 3
Параметри, що належать області 4
Візьмемо  . Особливі точки (2.13) — .
. Особливі точки (2.13) — .
Особливі точки (2.14) — .
Особливі точки (2.15) —  .
.
Фазовий портрет нелінійної системи (2.11) за заданих параметрах:
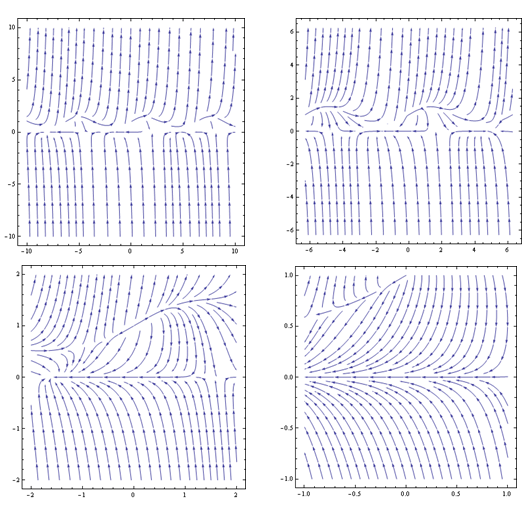
Рис. 2.8. Фазовий портрет системи (2.11) для параметрів із області 4
Параметри, що належать області 5
Візьмемо  . Особливі точки (3) — .
. Особливі точки (3) — .
Особливі точки (4) — .
Фазовий портрет нелінійної системи (2.11) за заданих параметрах:
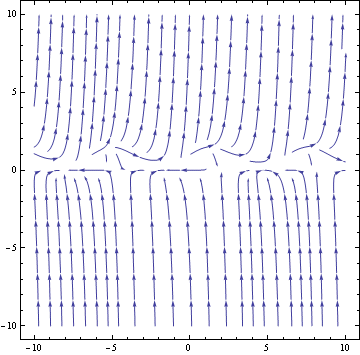
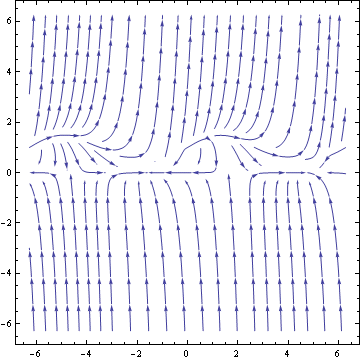
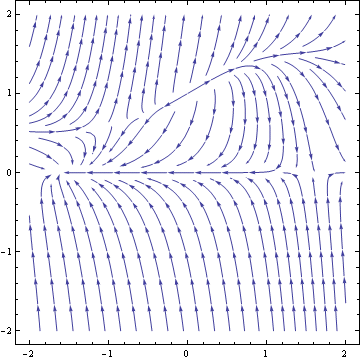

Рис. 2.9. Фазовий портрет системи (2.11) для параметрів із області 5
Варіанти завдань
|
|


















Лабораторна робота № 3. Аналіз катастроф
Постановка задачі
Дана функція f (x,y,z,t).
1) Знайти вироджені критичні точки К* та розщепити в них функцію.
2) Визначити катастрофу, що описується даною функцією в виродженій критичній точці, опираючись на пораховані значення corank(f), codim(f) та використовуючи визначник катастроф.
Основні теоретичні відомості. Типи катастроф. Класифікаційна теорема Тома
Теоретичні відомості та приклади, що наведені у цьому розділі, запозичені з [16].
Похідні відображень
Визначення: Похідною відображення  в точці
в точці  називається найкраще лінійне наближення цього відображення в цій точці, тобто таке лінійне відображення
називається найкраще лінійне наближення цього відображення в цій точці, тобто таке лінійне відображення  , для якого виконується граничний перехід:
, для якого виконується граничний перехід:
 ,
,
де  та
та  - норми векторів у просторах
- норми векторів у просторах  та
та  відповідно.
відповідно.
Приклад: Нехай  – деяка функція та
– деяка функція та  є звичайна похідна функції f в точці x, її значення в цій точці є k:
є звичайна похідна функції f в точці x, її значення в цій точці є k:  . Похідна відображення
. Похідна відображення  в новому сенсі є відображення
в новому сенсі є відображення  . Дійсно:
. Дійсно:

Позначимо через  множину всіх лінійних відображень з в . Тоді можна говорити, що похідна
множину всіх лінійних відображень з в . Тоді можна говорити, що похідна  є відображення
є відображення  , яка ставить кожній точці простору у відповідність цілком конкретне лінійне відображення . Кожний елемент простору лінійних відображень задається матрицею
, яка ставить кожній точці простору у відповідність цілком конкретне лінійне відображення . Кожний елемент простору лінійних відображень задається матрицею  відображення. Виписуючи елементи матриці в якому-небудь визначеному порядку, можна ототожнити з
відображення. Виписуючи елементи матриці в якому-небудь визначеному порядку, можна ототожнити з  . Тоді на похідну можна дивитись як на відображення:
. Тоді на похідну можна дивитись як на відображення:
 .
.
Визначення: Другою похідною  відображення
відображення  в точці х називається найкраще лінійне наближення відображення
в точці х називається найкраще лінійне наближення відображення  або відображення
або відображення  .
.
Таким чином, друга похідна вже задається матрицею розмірності
 . Тому, аналогічно, її можна вважати відображенням точок з
. Тому, аналогічно, її можна вважати відображенням точок з  в точки простору
в точки простору  :
:

Очевидно, що вже є квадратична форма від змінних простору прообразів.
Нехай відображення задано функціями
Тоді перша похідна відображення в точці  є лінійне відображення
є лінійне відображення

яке задається правилом

Іншими словами:
де  – матриця Якобі відображення
– матриця Якобі відображення  ,
,  – вектор-стовбець простору прообразу.
– вектор-стовбець простору прообразу.
Другою похідною  є наступна квадратична форма:
є наступна квадратична форма:
Якщо розглядати тільки відображення з n - вимірного простору в одновимірний простір  , то друга похідна
, то друга похідна  визначається сукупністю всіх других похідних цієї функції.
визначається сукупністю всіх других похідних цієї функції.
Визначення: Матриця

всіх других частинних похідних функції в одній точці називається матрицею Гессе та позначається  .
.
Визначення: Гессіаном відображення називається квадратична форма
з коефіцієнтами з матриці Гессе, тобто друга похідна відображення .
Визначення: Взаємнооднозначне неперервне відображення називається гомеоморфізмом.
Визначення: Взаємнооднозначне диференційоване відображення називається диффеоморфізмом.
Визначення: Рангом відображення в точці  називається ранг його похідної, тобто ранг його матриці Якобі в точці , і позначається
називається ранг його похідної, тобто ранг його матриці Якобі в точці , і позначається 
Ранг відображення дорівнює розмірності підпростору в  – образу
– образу  – при лінійному відображенні
– при лінійному відображенні  . Так як ранг матриці Якобі не може перевищити кількість рядків або стовпців, то очевидна нерівність
. Так як ранг матриці Якобі не може перевищити кількість рядків або стовпців, то очевидна нерівність

Визначення: Точки, в яких  , називаються регулярними.
, називаються регулярними.
Ви значення: Точки, в яких  , називаються критичними.
, називаються критичними.
Визначення: Значення функції  в критичній точці
в критичній точці  називається критичним значенням.
називається критичним значенням.
Визначення: Для відображення точка  називається критичною, якщо в ній
називається критичною, якщо в ній  , або, інакше,
, або, інакше,

Визначення: Критична точка відображення називається невиродженою, якщо

і називається виродженою, якщо

Таким чином, в невиродженій критичній точці друга похідна відображення є невиродженою квадратичною формою, тобто такою формою, ранг матриці якої дорівнює числу змінних п.
Визначення: Критична точка називається ізольованою, якщо знайдеться такий її окіл, в якому немає інших критичних точок.
Еквівалентність та структурна стійкість функцій
Визначення: Дві гладкі функції  називаються еквівалентними навколо нуля, якщо існує такий локальний диффеоморфізм
називаються еквівалентними навколо нуля, якщо існує такий локальний диффеоморфізм  в околі нуля і така стала
в околі нуля і така стала  , що навколо нуля
, що навколо нуля
 .
.
Позначення:  .
.
Визначення: Функція  називається структурно стійкою в даній точці, якщо для всіх досить малих гладких функцій
називається структурно стійкою в даній точці, якщо для всіх досить малих гладких функцій  функції
функції  еквівалентні в даній точці після перенесення в неї початку координат.
еквівалентні в даній точці після перенесення в неї початку координат.
Теорема (Мілнора): Критична точка функції структурно стійка, якщо вона невироджена.
Визначення: r -параметричним сімейством функцій п змінних будемо називати відображення  вигляду
вигляду

де  - внутрішні змінні, а
- внутрішні змінні, а  - керуючі параметри.
- керуючі параметри.
Визначення: Два сімейства функцій  називаються еквівалентними, якщо знайдуться диффеоморфізм
називаються еквівалентними, якщо знайдуться диффеоморфізм
 та гладке відображення
та гладке відображення  такі, що для всякого фіксованого
такі, що для всякого фіксованого  відображення
відображення  є диффеоморфізмом, а також знайдеться гладке відображення
є диффеоморфізмом, а також знайдеться гладке відображення  таке, що в околі нуля виконується співвідношення:
таке, що в околі нуля виконується співвідношення:

для будь-яких  та з цього околу.
та з цього околу.
Визначення: Якщо сімейство  еквівалентно в зазначеному вище сенсі будь-якому сімейству
еквівалентно в зазначеному вище сенсі будь-якому сімейству  , де
, де  – достатньо мале сімейство функцій, то сімейство
– достатньо мале сімейство функцій, то сімейство  називається структурно стійким.
називається структурно стійким.
Лема Морса та спорідненні твердження
Нижченаведена низка тверджень показує, що поблизу невиродженої критичної точки функцію  можна дифеоморфною заміною змінних привести до деякої простої стандартної форми.
можна дифеоморфною заміною змінних привести до деякої простої стандартної форми.
Лема: Нехай - гладка в будь-якому околі початку координат і  . Тоді в певному (можливо, меншому) околі початку координат існують функції
. Тоді в певному (можливо, меншому) околі початку координат існують функції  такі, що
такі, що
 ,
,
причому всі  гладкі, і
гладкі, і  .
.
Лема (Морса): Нехай  – невироджена критична точка гладкої функції , тоді в деякому околі точки можна визначити таку локальну систему координат
– невироджена критична точка гладкої функції , тоді в деякому околі точки можна визначити таку локальну систему координат  , що задовольняє умові
, що задовольняє умові  для всіх і таку, що в цьому околі
для всіх і таку, що в цьому околі

Визначення: Функція вигляду

називається морсівським l- сідлом.
Таким чином, за лемою Морса кожну невироджену критичну точку можна перевести в морсівське l -сідло для певного l. Якщо l=n – мінімум, якщо l=0 – максимум.
Твердження: Число l є топологічним інваріантом функції в критичній точці в тому сенсі, що гладкі заміни змінних не змінюють це число.
Розглянемо окремий випадок функції  . Якщо 0 – критична точка і
. Якщо 0 – критична точка і  то за лемою Морса, існує гладка заміна координат, в якій функція приймає вигляд
то за лемою Морса, існує гладка заміна координат, в якій функція приймає вигляд  , де знак співпадає зі знаком
, де знак співпадає зі знаком  . Якщо ж
. Якщо ж  ,то можна отримати більш тонку класифікацію.
,то можна отримати більш тонку класифікацію.
Теорема: Нехай  - гладка функція, для якої
- гладка функція, для якої
 але
але 
Тоді за допомогою деякої гладкої локальної заміни координат її можна привести до вигляду  при непарному
при непарному  і
і  при парному
при парному  , при чому в останньому випадку знак співпадає зі знаком
, при чому в останньому випадку знак співпадає зі знаком 
і.
Лема (Морса про розщеплення функції):
Нехай  - гладка функція з
- гладка функція з  , матриця Гессе, якої в 0 має ранг
, матриця Гессе, якої в 0 має ранг  (і коранг
(і коранг  ). Тоді
). Тоді  еквівалентна поблизу початку координат функції вигляду
еквівалентна поблизу початку координат функції вигляду
 ,
,
де  - деяка гладка функція.
- деяка гладка функція.
Зауважимо, що розмірність простору аргументів в морсівській частини функції рівна рангу  матриці Гессе, а розмірність простору аргументів в функції
матриці Гессе, а розмірність простору аргументів в функції  рівна
рівна  , тобто корангу матриці Гессе. Таким чином, поведінку функції навколо виродженої критичної точки можна вивчити, послуговуючись лише змінними, рівну корангу матриці Гессе.
, тобто корангу матриці Гессе. Таким чином, поведінку функції навколо виродженої критичної точки можна вивчити, послуговуючись лише змінними, рівну корангу матриці Гессе.
Визначення: Корангом функції в критичній точці будемо називати коранг матриці Гессе в цей точці, тобто

Лема (Морса о розщепленні сімейства функцій): Нехай  — гладке сімейство функцій и перша похідна сімейства по внутрішнім змінним в нулі рівна нулю:
— гладке сімейство функцій и перша похідна сімейства по внутрішнім змінним в нулі рівна нулю:
 ,
,
а коранг матриці Гессе
в цій точці дорівнює т., тоді f еквівалентно сімейству вигляду

де 
Визначення: Змінні в розщепленні функції або сімействі, яке входить в морсовскую частину, будемо називати несуттєвими змінними, а вхідні в  суттєвими змінними.
суттєвими змінними.
Приклад 1:  ,
,  , знайти критичну точку і відповідне морсівське сідло.
, знайти критичну точку і відповідне морсівське сідло.
Розв’язання: Знайдемо критичну множину 
 . Обчислемо гессіан:
. Обчислемо гессіан:

Отже, К – морсівська критична точка і існує така диффеоморфна заміна змінних, яка приводить функцію до виду стандартного морсівського сідла.
Зробимо першу заміну
 .
.
Тоді отримаємо 
Але це ще не морсівське сідло, тому зробимо ще заміну:  таку, що
таку, що  Якобіан
Якобіан  . Одже одержимо
. Одже одержимо
 .
.
Викидаємо константу, яка не впливає на еквівалентність функцій, в результаті одержимо, що такі функції правоеквівалентні в критичній точці К= (0,0) і
Приклад 2:  ,
,  , Знайти множину вироджених критичних точок і розщепити функцію.
, Знайти множину вироджених критичних точок і розщепити функцію.
Розв’язання: Знайдемо  :
:

Отже, 
Знайдемо матрицю Гессе на цій множині:
Таким чином  та
та  буде залежати від двох змінних.
буде залежати від двох змінних.
Тепер здійснимо розщеплення. Будуємо нову функцію  , яка є композицією вихідної функції і дифеоморфізма
, яка є композицією вихідної функції і дифеоморфізма 
 ,
,
де за змінними  функція невироджена, а
функція невироджена, а  є неявні функції, які знаходяться з системи рівнянь
є неявні функції, які знаходяться з системи рівнянь
Оскільки функція невироджена за першою змінною х, то потрібно знайти лише одну неявну функцію  з рівняння
з рівняння  , тобто з рівняння
, тобто з рівняння  . Тоді шуканим диффеоморфізмом є
. Тоді шуканим диффеоморфізмом є  , при чому
, при чому  і у нових змінних. Очевидно, що це – диффеоморфна заміна змінних:
і у нових змінних. Очевидно, що це – диффеоморфна заміна змінних:
 .
.
Тепер розглянемо еквівалентну функцію  .
. 
Таким чином,  може бути зведена до морсівського сідла:
може бути зведена до морсівського сідла: 
Перевіремо дифеоморфність  :
:
Отже отримаємо функцію в розщепленому вигляді:

Приклад 3: ,  . Знайти множину
. Знайти множину  , вироджених критичних точок, розщепити функцію.
, вироджених критичних точок, розщепити функцію.
Розв’язання: Шукаємо критичну точку.
Отже
Розглянемо матрицю Гессе:
Таким чином  та
та  буде залежати від однієї змінної.
буде залежати від однієї змінної.
Шукаємо  та
та 
отже  і диффеоморфізм
і диффеоморфізм  має вид
має вид
 ,
,
тобто це тотожне перетворення і  . А це значить, що функція вже розщеплена, оскільки
. А це значить, що функція вже розщеплена, оскільки 
Відповідно існує невироджена заміна змінних, яка приводить нашу функцію просто до морсівського сідла. Маємо  .
.
Зробимо заміну змінних  таку, що
таку, що

Обчислимо Якобіан
тобто заміна правомірна. В її результаті функція приймає вид  .
.
Здійснюючи заміну змінних таку ж як в першому прикладі  звідсі одержимо:
звідсі одержимо:

Приклад 4:  ,
,  . Знайти
. Знайти  , розщепити сімейство.
, розщепити сімейство.
Розв’язок: Шукаємо


Матриця Гессе:

Проведемо розщеплення, шукаємо  та
та  з рівнянь
з рівнянь

Розщеплююча заміна змінних:

та

 .
.
А частина функції, що залишилась,  може бути приведеною до вигляду морсівського сідла. Знаючи це, будемо шукати таку заміну:
може бути приведеною до вигляду морсівського сідла. Знаючи це, будемо шукати таку заміну:
 , тобто робимо заміну
, тобто робимо заміну  таку що
таку що  . Перевіримо на диффеоморфність:
. Перевіримо на диффеоморфність:
Відповідно  .
.
Знову за допомогою диффеоморфної заміни  , отримаємо результат
, отримаємо результат  .
.
Таким чином, сімейство набуває вигляд  або, перепозначуючи параметри
або, перепозначуючи параметри  , можна одержати
, можна одержати

тобто фактично сімейство залежіть лише від двох параметрів і сама цікава інформація про явище, яке описується цією функцією, міститься в частині  – функції однієї змінної і двох керуючих параметрів.
– функції однієї змінної і двох керуючих параметрів.
k-струміні та усічені алгебри
Нагадаємо, що для відображення  рядом Тейлора називаємо суму:
рядом Тейлора називаємо суму:

Визначення: k-струменемвідображення в точці  називається частина ряда Тейлора функції в точці
називається частина ряда Тейлора функції в точці  , що містить члени від нульового до k -го порядку включно і позначається струмінь
, що містить члени від нульового до k -го порядку включно і позначається струмінь  .
.
Іншими словами:

.
Визначення: Для будь-якого многочлена порядком будемо називати нижчий степінь, з якою в неї входять змінні, а степенем - вищий степінь.
Визначення: Будемо говорити, що функція має в нулі порядок k, якщо 
Визначення: k -усіченням многочлена Р(х) назвемо многочлен, утворений усіма членами Р(х), ступінь яких менше або дорівнює k. Цей многочлен позначимо  .
.
Скінченна визначеність
Визначення: Градієнтним або якобієвим ідеалом в просторі струменів  назвемо підпростір, що породжується
назвемо підпростір, що породжується  струменями всіх перших частинних похідних досліджуваної функції, і позначимо його
струменями всіх перших частинних похідних досліджуваної функції, і позначимо його  , тобто
, тобто

де  - довільні многочлени
- довільні многочлени  змінних ступеня
змінних ступеня  .
.
Очевидними є такі властивості якобієва підпростору:

Визначення: Добутком двох підпросторів простору многочленів степеня  назвемо простір, складений з
назвемо простір, складений з  усікань всіх добутків многочленів з відповідних підпросторів, тобто якщо
усікань всіх добутків многочленів з відповідних підпросторів, тобто якщо  , то їх добуток, що позначається
, то їх добуток, що позначається  , визначається умовою:
, визначається умовою:
 .
.
 - простір однорідних многочленів
- простір однорідних многочленів  змінних степеня
змінних степеня  .
.
Теорема: Функція  є сильно визначеною тоді і тільки тоді, коли
є сильно визначеною тоді і тільки тоді, коли  .
.
Теорема: Якщо функція є визначеною тоді  .
.
Таким чином, для визначеної функції її дотичний простір містить у собі простір однорідних многочленів ступеня .
Наслідок: Якщо є визначеною в деякій точці, то вона є сильно  визначеною в цій точці.
визначеною в цій точці.
Теорема (Стефана): Гладка функція є  визначеною, якщо і тільки якщо
визначеною, якщо і тільки якщо  для будь-якого фіксованого
для будь-якого фіксованого  .
.
Класифікаційна теорема Тома. Визначник катастроф
Визначення: Ковимірністю функції  у початку координат називається максимальна ковимірність якобієвого ідеалу
у початку координат називається максимальна ковимірність якобієвого ідеалу  у просторі струменів
у просторі струменів  , тобто величина
, тобто величина

Теорема: Нехай ковимірність функції на початку дорівнює с. Тоді будь –яке достатньо мале збурення цієї функції призводить до функції, що має навколо початку не більше c+1 критичних точок.
Визначення: r-деформацією функції назвемо будь-яку функцію  , що задовольняє умові
, що задовольняє умові 
Будемо також використовувати інший, еквівалентний запис для r-деформації:  , тобто F – це сімейство n аргументів і r параметрів.
, тобто F – це сімейство n аргументів і r параметрів.
Визначення: Будемо говорити, що d-деформація  функції
функції  індуковна з r-деформацйії
індуковна з r-деформацйії  за допомогою трьох відображень
за допомогою трьох відображень  , якщо поблизу початку в
, якщо поблизу початку в  виконана умова
виконана умова
 ,
,
де  - гладке відображення параметрів, що задається формулами
- гладке відображення параметрів, що задається формулами  ;
;
 - залежна від параметрів гладка локальна заміна координат в
- залежна від параметрів гладка локальна заміна координат в  , яка при фіксованому
, яка при фіксованому  є локальним дифеоморфізмом;
є локальним дифеоморфізмом;
 - гладка зсувна функція.
- гладка зсувна функція.
Якщо  - дифеоморфізм, то ми отримуємо еквівалентність сімейств функцій, визначену раніше.
- дифеоморфізм, то ми отримуємо еквівалентність сімейств функцій, визначену раніше.
Приклад: Деформація  індукується з
індукується з  за допомогою відображення
за допомогою відображення



Визначення: Деформація функції  називається версальною, якщо будь-яка інша деформація цієї функції може бути індукована із неї.
називається версальною, якщо будь-яка інша деформація цієї функції може бути індукована із неї.
Визначення: Деформація називається універсальною, якщо r – найменша визмірність, для якої існує версальна деформаія.
Побудуємо підпростір  наступним чином. Нехай дана деяка деформація
наступним чином. Нехай дана деяка деформація  функції
функції  . Обчислимо вектори
. Обчислимо вектори  у просторі
у просторі  :
:
Де  -
-  - струмінь без постійного члена для функції
- струмінь без постійного члена для функції  . І позначимо символом
. І позначимо символом  простір в
простір в  , натягнутий на ці вектори, тобто
, натягнутий на ці вектори, тобто

Визначення: Два підпростори U і V в  називаються трансверсальними, якщо вони разом породжують весь простір
називаються трансверсальними, якщо вони разом породжують весь простір  .
.
Теорема: Якщо функція являється k – визначеною, то її r –деформація F буде версальною тоді і тільки тоді, коли  і
і  представляють собою трансверсальні підпростори у
представляють собою трансверсальні підпростори у  . Вона буде універсальною тоді і тільки тоді, коли вона версальна і
. Вона буде універсальною тоді і тільки тоді, коли вона версальна і 
Наслідок: Будь-які дві її r –деформації F і G, для яких і  трансверсальні до
трансверсальні до  , еквівалентні як сімейства функцій.
, еквівалентні як сімейства функцій.
Побудова універсальної деформації
Тепер зберемо у єдине отримані відомості і запишемо технологію побудови універсальної деформації для k- визначеної функції:
1) знаходимо градієнтний ідеал нашої функції як підпростір в ;
2) розглядаємо додатковий підпростір  , вимірність якого є
, вимірність якого є  , вибираємо у ньому будь-який базис
, вибираємо у ньому будь-який базис  ;
;
3) будуємо шукане сімейство функцій за формулою  .
.
Приклад: Дана функція  . Необхідно її дослідити на скінченну визначеність і побудувати універсальну деформацію.
. Необхідно її дослідити на скінченну визначеність і побудувати універсальну деформацію.
Розв’язання: Перевіримо  на сильну 3-визначенність. Будуємо якобієв ідеал
на сильну 3-визначенність. Будуємо якобієв ідеал  :
:

де  -довільні поліноми з
-довільні поліноми з 
Розглянемо тепер дотичний простір  . Нас цікавить питання, які напрямки підпростору однорідних многочленів 4-го порядку містяться у цьому дотичному просторі. Для відповіді на нього виділимо в градієнтному ідеалі
. Нас цікавить питання, які напрямки підпростору однорідних многочленів 4-го порядку містяться у цьому дотичному просторі. Для відповіді на нього виділимо в градієнтному ідеалі  напрямки степеня
напрямки степеня  (достатньо, очевидно, виділити тільки їх, оскільки
(достатньо, очевидно, виділити тільки їх, оскільки  складається з многочленів порядку
складається з многочленів порядку  , а при обчисленні дотичного простору робиться відсікання усіх доданків із степенем більшим за четвертий):
, а при обчисленні дотичного простору робиться відсікання усіх доданків із степенем більшим за четвертий):  . Отже, направляючі вектори у дотичному просторі знайдемо, перебравши усі базисні вектори з
. Отже, направляючі вектори у дотичному просторі знайдемо, перебравши усі базисні вектори з  другого степеня, тобто
другого степеня, тобто  , і, помноживши їх на вищезаписані компоненти якобієвого ідеалу. В результаті отримаємо наступні направляючі вектори:
, і, помноживши їх на вищезаписані компоненти якобієвого ідеалу. В результаті отримаємо наступні направляючі вектори:
 .
.
Звідси зрозуміло, що орти  і
і  також містяться в цьому дотичному просторі, оскільки виражаються лінійним чином через ці направляючі вектори:
також містяться в цьому дотичному просторі, оскільки виражаються лінійним чином через ці направляючі вектори:  . Таким чином усі базисні вектори із
. Таким чином усі базисні вектори із  - містяться у дотичному просторі, тому можемо записати
- містяться у дотичному просторі, тому можемо записати  і по теоремі 1 функція
і по теоремі 1 функція  сильно 3-визначена.
сильно 3-визначена.
Тепер займемось побудовою універсальної деформації. Оскільки функція сильно 3-визначена, то побудуємо ідеал  . У даному випадку він співпадає з
. У даному випадку він співпадає з  , який записаний вище.
, який записаний вище.
На другому етапі нам необхідно знайти додатковий простір  і визначити його вимірність. Легко показати, що в ідеалі містяться усі кубічні напрямки:
і визначити його вимірність. Легко показати, що в ідеалі містяться усі кубічні напрямки:

 .
.
Із квадратичних напрямків ми матимемо тільки  та деякий середній напрямок
та деякий середній напрямок  у площині
у площині  . Таким чином в нас не вистачає в ідеалі двох лінійних напрямків x і y, а також одного квадратичного відмінного від xy і не паралельного
. Таким чином в нас не вистачає в ідеалі двох лінійних напрямків x і y, а також одного квадратичного відмінного від xy і не паралельного  . Звідси робимо висновок, що розмірність додаткового простору
. Звідси робимо висновок, що розмірність додаткового простору  дорівнює трьом, а отже ковимірність функції у виродженій критичній точці 0 також дорівнює трьом:
дорівнює трьом, а отже ковимірність функції у виродженій критичній точці 0 також дорівнює трьом:  . У якості кобазису функції в цій точці можна взяти наступні відсутні у напрямки
. У якості кобазису функції в цій точці можна взяти наступні відсутні у напрямки  . Дійсно, через
. Дійсно, через  можна виразити усі базисні вектори другого степеня лінійним образом:
можна виразити усі базисні вектори другого степеня лінійним образом:  .
.
Таким чином, універсальною деформацією досліджуваної функції буде, наприклад, наступне структурно стійке сімейство функцій:
 .
.
Лінійка Ньютона
У цьому пункті на простому прикладі розглянемо ще один прийом визначення корозмірності функції у критичній точці – що називається «метод лінійки Ньютона».
Нехай нам необхідно побудувати універсальну деформацію наступної функції
Розрахуємо частинні похідні: 
Зображуємо «діаграму Ньютона», яка представляє собою сітку (рис. 3.1), вузли перетину якої відповідають степеням одночленів. Тоді відмітимо перший утворюючий одночлен xy точкою на перетині ліній 1,1. Відкинемо тіні від неї (вправо та вгору).

Рис. 3.1 Діаграма Ньютона
Наступна похідна  Відмітимо кружками
Відмітимо кружками  і
і  та поєднаємо їх лінією – це і є лінійка Ньютона. Для того, щоб знайти мономи (одночлени), від яких треба відкидати тіні, будемо зрушувати лінійку паралельно самій собі (дозволяється її рухати тільки вправо і вгору – в сторону збільшення степенів x і y). Як тільки один з кружків потрапляє у тінь від одночлена
та поєднаємо їх лінією – це і є лінійка Ньютона. Для того, щоб знайти мономи (одночлени), від яких треба відкидати тіні, будемо зрушувати лінійку паралельно самій собі (дозволяється її рухати тільки вправо і вгору – в сторону збільшення степенів x і y). Як тільки один з кружків потрапляє у тінь від одночлена  , то другий кружок вказує на одночлен, від якого вже можна відкидати тінь.
, то другий кружок вказує на одночлен, від якого вже можна відкидати тінь.
В нашому випадку, переміщуючи лінійку вгору на одну клітинку, отримаємо, що нижній кружок потрапляє в тінь  , верхній кружок пр. цьому знаходиться в
, верхній кружок пр. цьому знаходиться в  і від нього можна відкинути тінь. Переміщуючи тінь з вихідного положення вправо на одну клітинку, також знаходимо ще один моном, від якого можна відкинути тінь:
і від нього можна відкинути тінь. Переміщуючи тінь з вихідного положення вправо на одну клітинку, також знаходимо ще один моном, від якого можна відкинути тінь:  . В результаті отримуємо образ ідеалу
. В результаті отримуємо образ ідеалу  на діаграмі Ньютона такий як зображено на рис.3.
на діаграмі Ньютона такий як зображено на рис.3.
Поза ідеалом залишилось 7 вузлів перетинів. Один з них  нас не цікавить, так як відповідає константі, які ми не розглядаємо. Крім того, одночлени
нас не цікавить, так як відповідає константі, які ми не розглядаємо. Крім того, одночлени  і
і  , пов’язані через похідну <
, пов’язані через похідну <

