




В качестве ОР будем подразумевать колесное транспортное средство, линейное поступательное движение которого осуществляется за счет вращательного движения колесных пар. Следовательно, чувствительным элементом изменения скорости движения объекта может служить колесо, а в качестве измерительного устройства может служить, например, преобразователь скорости вращения колеса в напряжение постоянного тока или частоту переменного тока.
Введем следующие обозначения:
 – коэффициент преобразования, связывающий линейную скорость
– коэффициент преобразования, связывающий линейную скорость  с угловой скоростью
с угловой скоростью  вращения колеса:
вращения колеса:  ;
;
 – коэффициент преобразования угловой скорости вращения колеса в напряжение постоянного тока:
– коэффициент преобразования угловой скорости вращения колеса в напряжение постоянного тока:  ;
;
 – коэффициент преобразования линейной скорости в напряжение постоянного тока:
– коэффициент преобразования линейной скорости в напряжение постоянного тока:  , где
, где  .
.
В качестве усилительно-преобразовательного устройства может служить электросиловая установка, установленная на транспортном средстве и воздействующая на тяговый двигатель, являющийся исполнительным устройством, выполняющим функции ускорения или замедления (при электрическом реостатном торможении) вращения колеса. Коэффициент преобразования  усилительно-преобразовательного устройства устанавливает связь между величиной отклонения
усилительно-преобразовательного устройства устанавливает связь между величиной отклонения  задающего воздействия
задающего воздействия  от измеренного значения
от измеренного значения  и величиной требуемой силы тяги
и величиной требуемой силы тяги  (или силой торможения W т), а именно:
(или силой торможения W т), а именно:  . Тяговый двигатель в режиме тяги реализует требуемое значение силы или в режиме генератора – требуемое значение силы W т, обеспечивая соответствующее изменение скорости вращения колеса в единицу времени (ускорение/замедление
. Тяговый двигатель в режиме тяги реализует требуемое значение силы или в режиме генератора – требуемое значение силы W т, обеспечивая соответствующее изменение скорости вращения колеса в единицу времени (ускорение/замедление  ).
).
С целью упрощения структурной схемы регулятора скорости принимаем допущение о равенстве абсолютного значения приращения скорости в единицу времени b как при регулируемом увеличении скорости вращения колеса, так и при ее снижении в процессе торможения транспортного средства. Очевидно, что приращению угловой скорости вращения колеса b в единицу времени соответствует приращение линейной скорости  .
.
Для повышения точности регулирования скорости движения ОР на практике часто вводят такую зависимость между величиной отклонения  значений заданной скорости
значений заданной скорости  от фактической
от фактической  и величиной b, при которой, чем меньше величина отклонения , тем меньше требуемое значение b. В качестве примера примем линейную зависимость:
и величиной b, при которой, чем меньше величина отклонения , тем меньше требуемое значение b. В качестве примера примем линейную зависимость:  , где
, где  – коэффициент пропорциональности. Следовательно, если известна разность
– коэффициент пропорциональности. Следовательно, если известна разность  , то можно определить общий коэффициент преобразования (усиления)
, то можно определить общий коэффициент преобразования (усиления)  тракта, состоящего из усилительно-преобразовательного и исполнительного устройств, из следующего соотношения:
тракта, состоящего из усилительно-преобразовательного и исполнительного устройств, из следующего соотношения:
 , откуда
, откуда  ,
,
где  .
.
Значения коэффициента  для различных вариантов приведены в табл.1, а на рис.1 приведена общая структурная схема регулятора скорости, которая представлена в виде набора связанных между собой функциональных узлов (блоков).
для различных вариантов приведены в табл.1, а на рис.1 приведена общая структурная схема регулятора скорости, которая представлена в виде набора связанных между собой функциональных узлов (блоков).

Рис.1. Общая структурная схема автоматического регулятора скорости
С выхода задающего устройства ЗУ на один из входов устройства сравнения УС поступает постоянное напряжение  , пропорциональное значению заданной скорости
, пропорциональное значению заданной скорости  . На другой вход устройства УС поступает напряжение
. На другой вход устройства УС поступает напряжение  , пропорциональное фактической скорости движения
, пропорциональное фактической скорости движения  . С выхода УС сигнал ошибки в виде напряжения
. С выхода УС сигнал ошибки в виде напряжения  , пропорционального разности скоростей
, пропорционального разности скоростей  , поступает на собственно регулятор, состоящий из усилительно-преобразовательного УП и исполнительного ИСУ устройств и который преобразует сигнал ошибки
, поступает на собственно регулятор, состоящий из усилительно-преобразовательного УП и исполнительного ИСУ устройств и который преобразует сигнал ошибки  в регулирующее воздействие
в регулирующее воздействие  на объект ОР, ускоряя или замедляя его движение с интенсивностью
на объект ОР, ускоряя или замедляя его движение с интенсивностью  в зависимости от величины и знака рассогласования скоростей. Система, представленная на рис. 1, относится к статическим системам автоматического управления, в которых регулирование осуществляется по отклонению. Для статических систем характерна существенная зависимость ошибки регулирования в установившемся режиме от значения статического коэффициента усиления
в зависимости от величины и знака рассогласования скоростей. Система, представленная на рис. 1, относится к статическим системам автоматического управления, в которых регулирование осуществляется по отклонению. Для статических систем характерна существенная зависимость ошибки регулирования в установившемся режиме от значения статического коэффициента усиления  разомкнутой (без обратной связи) системы регулирования. С увеличением
разомкнутой (без обратной связи) системы регулирования. С увеличением  ошибка
ошибка  уменьшается, а с уменьшением – увеличивается.
уменьшается, а с уменьшением – увеличивается.
Прежде, чем приступить к анализу процесса регулирования и к выбору структуры и параметров САУ, ее предварительно разбивают на элементарные типовые динамические звенья. При этом определяют статические и динамические характеристики каждого звена. Как видно из рис.1, каждый функциональный блок имеет свою входную и выходную величину. Так как коэффициент преобразования  изменяет только масштаб переменных, то в дальнейшем удобнее оперировать с входными и выходными переменными в масштабе скорости. Тогда статическая характеристика ОР будет выражать собой зависимость между выходной (регулируемой) величиной
изменяет только масштаб переменных, то в дальнейшем удобнее оперировать с входными и выходными переменными в масштабе скорости. Тогда статическая характеристика ОР будет выражать собой зависимость между выходной (регулируемой) величиной  и входной величиной (регулирующим воздействием)
и входной величиной (регулирующим воздействием)  и иметь вид:
и иметь вид:
 ,
,
где  – скорость объекта на момент начала регулирования,
– скорость объекта на момент начала регулирования,
а – требуемое изменение линейной скорости в единицу времени с тем, чтобы обеспечить соответствующее приращение скорости Δ V p в установившемся режиме регулирования.
Кроме того, на ОР может поступать внешнее в общем виде произвольно изменяющееся возмущающее воздействие, обусловленное, например, изменением сопротивления движению транспортного средства на участках пути с различным профилем, вызывающее изменение фактической скорости на величину, равную  . Следовательно, статическая характеристика ОР окончательно примет следующий вид:
. Следовательно, статическая характеристика ОР окончательно примет следующий вид:  .
.
Следовательно, реальный объект регулирования мы можем заменить его моделью в виде блока генератора ступенчатой функции, генерирующего постоянный сигнал  , численно равный начальной скорости движущегося объекта
, численно равный начальной скорости движущегося объекта  , и двух блоков, реализующих функцию суммирования всех воздействий. На рис.2. показана структурная схема модели ОР.
, и двух блоков, реализующих функцию суммирования всех воздействий. На рис.2. показана структурная схема модели ОР.

Рис.2. Структурная схема модели объекта регулирования (ОР)
Прежде, чем приступать к моделированию процесса регулирования скорости, необходимо разработать структурные схемы моделей отдельных функциональных узлов, входящих в состав системы автоматического управления с использованием элементарных типовых динамических звеньев.
Для упрощения моделирования при выполнении задания 1случайное по своей природе возмущающее воздействие Δ V p на процесс движения ОР, заменим ступенчатой функцией с амплитудой, равной максимальному его значению А. В этом случае структурная схема модели источника ВВ может быть представлена в виде блока ступенчатой функции (рис. 3):

Рис.3. Структурная схема модели постоянного возмущающего
воздействия (ВВ)
Два последовательно включенных функциональных блока в цепи обратной связи: чувствительный элемент (ЧЭ) и измерительное устройство (ИУ) можно было бы представить в виде усилительного безинерционного звена с коэффициентом усиления  , который по своей сути является коэффициентом усиления
, который по своей сути является коэффициентом усиления  цепи обратной связи между выходом и входом регулятора скорости.
цепи обратной связи между выходом и входом регулятора скорости.
Так как регулируемый объект обладает инерционностью, т.е. для регулируемого изменения скорости требуется определенное время, то для ее учета в цепь обратной связи вводим апериодическое (инерционное) звено с постоянной времени  и статическим коэффициентом усиления . Структурная схема блока, замещающего элементы цепи обратной связи, представлена на рис.4.
и статическим коэффициентом усиления . Структурная схема блока, замещающего элементы цепи обратной связи, представлена на рис.4.
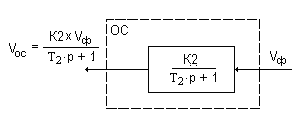
Рис.4. Структурная схема модели цепи обратной связи (ОС)
Взаимосвязь между входным и выходным сигналами модели цепи обратной связи в этом случае описывается соотношением:  .
.
Значение постоянной времени  выбирается из табл.1, а значение коэффициента усиления
выбирается из табл.1, а значение коэффициента усиления  при моделировании регулятора скорости должно определяться расчетом из уравнения динамики автоматического регулятора скорости, методика составления которого приводится ниже.
при моделировании регулятора скорости должно определяться расчетом из уравнения динамики автоматического регулятора скорости, методика составления которого приводится ниже.
Два последовательных функциональных блока в основной цепи регулятора: усилительно-преобразовательное (УП) и исполнительное (ИСУ) устройства представим в виде одного апериодического звена с коэффициентом усиления  , характеризующим результирующий коэффициент усиления данной цепи, и постоянной времени Т 1, которая характеризует инерционность исполнительного устройства. Значения переменных
, характеризующим результирующий коэффициент усиления данной цепи, и постоянной времени Т 1, которая характеризует инерционность исполнительного устройства. Значения переменных  и Т 1 выбираются из табл.1.
и Т 1 выбираются из табл.1.
Задающее устройство (ЗУ) может быть представлено в виде генератора ступенчатой функции с амплитудой F, численно равной значению заданной скорости  , рис. 5.
, рис. 5.

Рис. 5. Структурная схема модели задающего устройства (ЗУ)
Сигнал с выхода ЗУ поступает на один из входов устройства сравнения (УС), реализующего функцию вычитания (сравнения) двух сигналов, рис. 6. На другой вход УС должен поступать сигнал V oc с выхода блока ОС, моделирующего цепь обратной связи.
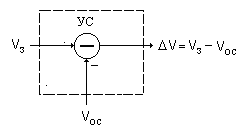
Рис. 6 Структурная схема модели устройства сравнения

