




Понятие об управлении и объекте управления.
Методы коррекции систем автоматического управления.
Функциональная схема системы автоматического управления. Назначение основных элементов схемы.
Показатели качества систем автоматического управления.
Классификация САУ по принципу действия.
Апериодическое звено систем автоматического управления. Основные характеристики.
Структурная схема САУ по отклонению.
Интегрирующее звено систем автоматического управления. Основные характеристики.
Структурная схема САУ по возмущению.
Колебательное звено систем автоматического управления. Основные характеристики.
Структурная схема САУ с комбинированным управлением.
Дифференцирующее звено систем автоматического управления. Основные характеристики.
Структурная схема адаптивной системы автоматического управления.
Понятие об устойчивости систем автоматического регулирования. Алгебраические критерии устойчивости.
Классификация САУ по назначению.
Частотный критерий устойчивости систем автоматического регулирования Михайлова.
Основные способы формализованного описания динамических свойств элементов САУ.
Последовательное соединение динамических звеньев САУ.
Временные функции динамических звеньев САУ.
Параллельное соединение звеньев САР.
Переходные процессы в САУ и их характеристики.
Частотные оценки показателей качества САУ.
Передаточная функция замкнутой САУ.
Электрические аналоги апериодического звена.
Понятие о статических и астатических САУ.
Электрические аналоги интегрирующего звена.
Основные понятия и определения систем автоматического управления. Классификация САУ.
Электрические аналоги колебательного звена.
Частотные характеристики САУ.
Электрические аналоги дифференцирующего звена.
Частотные характеристики апериодического звена.
Корневые оценки показателей качества САУ.
Частотные характеристики интегрирующего звена.
Последовательные корректирующие устройства.
Частотные характеристики колебательного звена.
Параллельные корректирующие устройства.
Частотные характеристики дифференцирующего звена.
Ошибки статических САУ при типовых воздействиях.
Методика построения асимптотической ЛАЧХ системы автоматического управления.
Ошибки астатических САУ при типовых воздействиях.
Передаточная функция замкнутой САУ при отрицательной жесткой обратной связи.
Понятие об установившемся процессе и точности САУ.
Передаточная функция замкнутой САУ при отрицательной гибкой обратной связи.
Частотный и логарифмический критерии устойчивости Найквиста.
МЕТОДИЧЕСКИЕ УКАЗАНИЯ ДЛЯ ОБУЧАЮЩИХСЯ ПО ОСВОЕНИЮ ДИСЦИПЛИНЫ
КОНСПЕКТ ЛЕКЦИЙ
Тема 1. Общие сведения о системах управления
Предмет «Теория автоматического управления» знакомит вас с основными принципами построения систем автоматического управления, методами формализованного описания и анализа качества функционирования этих систем.
Рассмотрим с вами основные понятия, с которыми оперирует теория управления и которые вы должны хорошо себе представлять и использовать при изучении последующих разделов теории.
Объект управления. Под объектом управления следует понимать объект, на достижение желаемых результатов функционирования которого направлены специально организованные воздействия.
Воздействие. Воздействие есть внешнее влияние на объект управления, вызывающее в последнем изменение его свойств и (или) состояния.
Управление. Управление есть процесс выработки и осуществления управляющих воздействий в виде заданий для целенаправленного изменения каких-либо свойств или параметров объекта управления, под которым мы будем также понимать любой физический объект или процесс, свойства или параметры которых подвергаются изменению посредством определенного физического воздействия на них.
Возмущение – есть внешнее воздействие на любой элемент системы управления, включая объект управления, затрудняющее достижение цели управления. Компенсация действий возмущений на объект управления есть задача автоматического регулирования.
Регулирование. Регулирование – есть регулирующее воздействие на объект управления с целью обеспечения близости фактических значений одного или нескольких параметров объекта управления к их заданным значениям.
Что же требуется для управления, при том, следует отметить, качественного управления.
Во-первых, должно быть известно задание, а именно, какой параметр объекта управления мы хотим изменить, и какое значение этого параметра нас устроит. Следовательно, необходимо задающее устройство.
Во-вторых, необходим инструментарий для непосредственного физического воздействия на объект управления. Другими словами необходимо исполнительное устройство для выполнения задания.
В-третьих, очевидно, необходим контроль над ходом выполнения задания и проверка соответствия результатов исполнения заданию, т.е. необходимо иметь контрольно-измерительные устройства.
Рассмотрим примеры возможных схем управления.
Пример 1. Дачник копает лопатой на своем участке яму определенных известных только ему размеров. Здесь дачник является задающим устройством, а яма – объектом управления. В качестве исполнительного устройства использованы руки и ноги человека, воздействующие на лопату. Изменяемой (регулируемой) величиной являются размеры ямы. Для получения требуемого результата используется мерная линейка, с помощью которой человек измеряет текущие размеры ямы. Здесь органы зрения и мерная линейка служат контрольно-измерительным устройством. Человек перестает копать, когда истинные размеры ямы будут соответствовать заданным, для чего человек мысленно выполняет логическую работу по анализу результатов измерения фактических размеров ямы, в зависимости от которых от продолжает копать или прекращает работу, т.е. в данном случае человек выполняет еще функции сравнивающего устройства.
Представим рассмотренный процесс управления в виде формализованной функциональной схемы некоторой системы управления.
Задающее устройство – дачник, хранящий в памяти требуемые размеры ямы.
Сравнивающее устройство – логика мышления дачника
Регулирующее устройство – логика мышления человека
Исполнительной устройство – руки и ноги человека, воздействующие на лопату
Объект управления – яма
Контрольно-измерительное устройство – зрение человека и мерная линейка.
Так как для обеспечения точных размеров ямы человек вынужден по ходу дела менять режим работы (уменьшать усилия нажатия на лопату и темп работы по мере приближения к заданным размерам), то он в этом случае исполняет еще роль регулирующего устройства.
Как видно из приведенной схемы в процессе управления практически все функции выполняет один человек, т.е. мы имеем дело чисто с ручным управлением процессом копания.
Пример 2. Рабочий по заданию дачника копает на садовом участке яму заданных размеров. Что же в этом случае меняется в нашей функциональной схеме? Дачник здесь исполняет роль только внешнего источника первичной информации для рабочего, который выполняет в дальнейшем все функции системы управления.
Пример 3. При термической обработке изделия в термокамере необходимо автоматически без участия человека поддерживать определенную заданную температуру.
Сейчас мы убедимся в том, что формализованная функциональная схема системы автоматического управления практически идентично той, которую мы рассматривали для системы ручного управления. Действительно:
Задающее устройство – задает требуемое значение температуры в виде сигнала определенной физической природы (например, электрического напряжения, пропорционального значению температуры). Значение температуры может задаваться человеком-оператором с помощью ряда кнопок на пульте управления или вырабатываться автоматически управляющим вычислительным комплексом на основе входной информации об изделии, его свойствах и назначении.
Сравнивающее устройство – производит сравнение значений двух сигналов одной физической природы, соответствующих заданному и фактическому значениям температуры, и вырабатывает разностный сигнал ошибки. Сравнение может осуществляться, как в аналоговом виде сигналов, так и в цифровом.
Регулирующее устройство или просто регулятор – вырабатывает соответствующее регулирующее воздействие на объект управления в зависимости от величины сигнала ошибки – сигнала расстройки. Регулятор может содержать усилитель разностного сигнала ошибки, исполнительное устройство или преобразователь сигнала одной физической природы в другую, более удобную для воздействия на объект управления (например, преобразование электрического сигнала в тепловой сигнал).
Объект управления – термокамера, температура в которой является регулируемым параметром.
Контрольно-измерительное устройство – преобразует значение фактической температуры в определенный уровень сигнала другой физической природы, аналогичный заданному сигналу. Как правило, устройство содержит чувствительный элемент для пропорционального преобразования значения текущей температуры в сигнал, удобный для последующего измерения, и измерительное устройство для измерения уровня преобразованного сигнала. В качестве контрольно-измерительного устройства может, например, использоваться термопара.
В реальных условиях эксплуатации на регулируемые параметры объекта управления могут влиять внешние возмущающие воздействия различного рода, например, температура окружающей среды.
Таким образом, любую систему автоматического управления (САУ) можно рассматривать как совокупность некоторого ряда составных частей – звеньев. Деления на звенья может осуществляться как по функциональному признаку (измерительные, усилительные, преобразовательные, исполнительные и другие элементы), так и по динамическим свойствам.
Системы автоматического управления по принципу действия могут быть классифицированы на системы замкнутые, разомкнутые, комбинированные и адаптивные.
К замкнутым системам относятся системы управления по отклонению, представляющие собой системы с обратной связью и представляющие собой основной тип САУ.
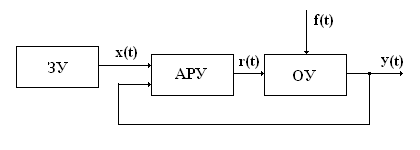
Структурная схема САУ по отклонению
На приведенном рисунке приняты следующие обозначения:
ЗУ – задающее устройство, вырабатывающее управляющее воздействие x(t);
АРУ – устройство автоматического регулирования, вырабатывающее регулирующее воздействие r(t);
ОУ – объект управления:
y(t) – регулируемый параметр объекта управления:
f(t) – внешнее возмущающее воздействие на ОУ.
К разомкнутым системам относятся системы управления по возмущению, в которых регулирующее воздействие вырабатывается в зависимости от результатов измерения возмущения.
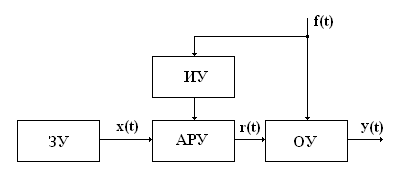
Структурная схема САУ по возмущению
Системы САУ с комбинированным управлением сочетают в себе принципы управления по отклонению и возмущению.

Структурная схема САУ с комбинированным управлением
Адаптивные системы САУ обладают способностью приспособляться в процессе функционирования к изменению окружающей среды и улучшать свои свойства.
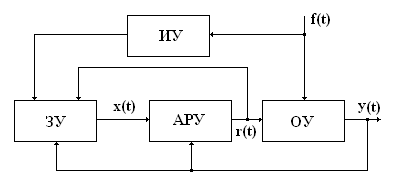
Структурная схема адаптивной системы САУ
В зависимости от назначения системы автоматического управления делят на системы стабилизации, программного управления и следящие системы.
Системы стабилизации предназначены для поддержания постоянного значения регулируемой величины, задаваемого ЗУ.
Системы программного управления предназначены для изменения значения регулируемой величины по заранее заданной программе, называемой программой управления.
Следящие системы предназначены для изменения регулируемой величины по закону изменения задающего воздействия.
По виду используемых сигналов САУ можно подразделить на непрерывные и дискретные системы. Дискретные системы можно подразделить на импульсные и релейные.
В зависимости от числа регулируемых параметров системы САУ подразделяются на одномерные и многомерные системы.
При изучении процессов управления все многообразие САУ можно рассматривать как различные комбинации из небольшого количества стандартных элементов – динамических звеньев.
Любой элемент характеризуется связью между его входным и выходным сигналами. Эта связь определяет физические процессы в элементе как в статическом режиме, когда входной и выходной сигналы – постоянные величины, так и в динамическом режиме, при котором входной и выходной сигналы являются некоторой функцией времени.
В статическом режиме взаимосвязь между входной и выходной величинами определяет статические свойства элемента, в динамическом режиме – динамические свойства элемента.
Для формализованного описания динамических свойств элементов используются следующие способы:
дифференциальные уравнения;
передаточные функции W(p), которые представляют собой запись дифференциальных уравнений в операторной форме путем перехода к преобразованиям Лапласа;
временные функции, характеризующие изменение во времени выходного сигнала определенного вида;
частотные характеристики, устанавливающие зависимость между амплитудой и фазой входного и выходного гармонических сигналов при изменении частоты входного сигнала.
Удобство использования формализованного описания динамических свойств заключается в том, что независимо от физической природы элементов их поведение во времени (динамика) может быть описана одинаковыми дифференциальными уравнениями, а, следовательно, одинаковыми передаточными функциями, временными и частотными характеристиками.
Поэтому динамические элементы, которые описываются одинаковыми дифференциальными уравнениями, могут быть формально представлены одним и тем же стандартным типом динамического звена.
При этом следует отметить, что элементарным динамическим звеном называется звено, динамические свойства которого описываются линейным дифференциальным уравнением не выше второго порядка.
a2∙y(2)(t) + a1∙y(1)(t) + a0∙y(t) = b2∙x(2)(t) + b1∙x(1)(t) + b0∙x(t) (1)
Здесь: y(t) – временная функция выходного сигнала;
x(t) – временная функция входного сигнала;
y(j)(t) – j-я производная функции y(t);
x(j)(t) – j-я производная функции y(t);
am, bm – постоянные коэффициенты уравнения при соответствующих переменных.
Передаточная функция W(p) есть отношение выходного сигнала к входному сигналу, представленное в операторной форме:
W(p) = y/х
Представим выражение (1) в операторной форме, для чего заменим знак производной по времени d/dt на оператор Лапласа – р, а именно:
y(2)(t) = d 2y/ dt 2 = p 2y; y(1)(t) = d y/ dt = p y;
x(2)(t) = d 2x/ dt 2 = p 2x; x(1)(t) = d x/ dt = p x.
Произведя соответствующие замены в дифференциальном уравнении, получим следующее уравнение в операторной форме:
a2∙p2y + a1∙py + a0∙y = b2∙p2x + b1∙px + b0∙x.(2)
Здесь выражение (1) является оригиналом дифференциального уравнения, а выражение (2) называется его изображением по Лапласу.
Вынесем за скобки в уравнении (2) переменные у и х:
у∙(a2∙p2 + a1∙p + a0) = х∙(b2∙p2 + b1∙p + b0). (3)
Из уравнения (3) легко находим выражение для передаточной функции:
W(p) = y/х = (b2∙p2 + b1∙p + b0)/ (a2∙p2 + a1∙p + a0) (4)
Если вынести в выражении (4) за скобки постоянные коэффициенты a0 и b0, то получим стандартное представление передаточной функции в операторной форме:
W(p) = (b0/a0)∙[(b2/b0)∙p2 + (b1/b0)∙p + 1]/[(a2/a0)∙p2 + (a1/ a0)∙p + 1], или
W(p) = К∙(T2x∙p2 + T1x∙p + 1)/(T2y∙p2 + T1y∙p + 1) (5)
Здесь: T2x и T1x – постоянные времени выражения в скобках числителя;
T2у и T1у – постоянные времени выражения в скобках знаменателя.
В общем виде постоянные времени определяют характер изменения содержащих их функций от времени. Если с течением времени значение функции не меняется, то производная от этой функции будет равна нулю, следовательно, и оператор Лапласа р = 0. И тогда переходная функция, как это следует из выражения (5), будет равна статическому коэффициенту усиления К: W(p = 0) = K, что соответствует уравнению: у = К∙х.
К временным характеристикам динамических звеньев относят переходную и весовую функции.
Переходная функция h(t) определяет характер изменения во времени выходного сигнала звена, если входной сигнал является единичной ступенчатой функцией x(t) = 1(t):
y(t) = h(t)∙1(t). (6)
Весовая функция g(t) (импульсная переходная функция) определяет характер изменения во времени выходного сигнала звена, если входной сигнал является импульсной функцией x(t) = δ(t) = 1′(t), которая представляет собой производную от единичной ступенчатой функции, т.е. ее кривая на плоскости охватывает площадь, равную 1:
y(t) = g(t)∙δ(t) = g(t)∙1′(t) (7)
Для нахождения временных характеристик динамических звеньев необходимо решить дифференциальные уравнения звена при нулевых начальных условиях [у(х = 0)] и соответствующих входных сигналах 1(t) или δ(t).
Весовая функция является производной от переходной функции. Следовательно весовую функцию g(t) можно определить путем аналитического и графоаналитического дифференцирования переходной функции h(t): g(t) = dh(t)/dt.
Рассмотрим с вами далее дифференциальные уравнения основных типов элементарных динамических звеньев и их переходные функции.
Интегрирующее звено
Характерная особенность интегрирующего звена заключается в том, что скорость изменения значения выходного сигнала y(t) звена (производная y′(t)) прямо пропорциональна значению выходного сигнала, т.е.:
y′(t) = K∙x(t). (8)
или в операторной форме:
p∙y = K∙x. (9)
При подаче на вход единичной ступенчатой функции x(t) = 1(t) выражение (8) примет следующий вид: y′(t) = K, или dy = K∙dt. Интегрируя обе части полученного уравнения, получим аналитическое выражение переходной функции интегрирующего звена:
y(t) = h(t) = K∙t. (10)
Из уравнения (9) можно получить аналитическое выражение передаточной функции интегрирующего звена:
W(p) = y/x = K/p. (11)
Из уравнения 10 следует, что весовая функция интегрирующего звена равна его статическому коэффициенту усиления К:
g(t) = h′(t) = K (12)
Апериодическое (инерционное) звено
Динамические свойства апериодического звена определяются дифференциальным уравнением первой степени:
T∙ y′(t) + y(t) = K∙ x(t). (13)
Из данного выражения следует, что динамические свойства звена зависят от аргумента Т, называющегося постоянной времени и определяющего длительность переходного процесса от начального значения выходной функции y(t) к установившемуся постоянному ее значению при подаче на вход единичной ступенчатой функции 1(t).
Уравнение (13) может быть также представлено в операторной форме:
T∙p∙y + y = y(T∙p + 1) = K∙ x. (14)
Из уравнения (14) легко получаем аналитическое выражение для передаточной функции апериодического звена:
W(p) = y/x = K/(T∙p + 1). (15)
Учитывая, что передаточная функция есть ничто иное, как изображение по Лапласу L[g(t)] весовой функции, найдем оригинал весовой функции, представив передаточную функцию в виде произведения изображений простейших функций, оригиналы которых можно найти из справочных таблиц изображений функций.
L[g(t)] = W(p) = K/(T∙p + 1) = (K/T)∙1/(p + 1/T). (16)
В нашем случае изображение некоторой неизвестной функции f(t) равно L[f(t)] = 1/(p + 1/T), которому соответствует оригинал f(t) = ept, где p – есть ничто иное, как решение (корень) характеристического уравнения, получаемого приравниванием выражения в знаменателе изображения L[f(t)] к нулю: p + 1/T = 0, откуда р = - 1/T. Следовательно, выражение для весовой функции будет иметь вид:
g(t) = (K/T)∙f(t) = (K/T)∙e-t/T (17)
Переходную функцию h(t) можно найти интегрированием правой части выражения (17), которое производим в операторной форме путем умножения изображения весовой функции L[g(t)] на отношение (1/р), представляющее собой передаточную функцию интегрирующего звена со статическим коэффициентом усиления, равным 1:
L[h(t)] = L[g(t)]∙1/р = (1/р)∙ (K/T)∙1/(p + 1/T). (18)
Для отыскания оригинала функции h(t) разложим правую часть выражения (18) на элементарные дроби, используя метод неопределенных коэффициентов.
(K/T)/[p∙(p + 1/T)] = A/p + B/(p + 1/T) =
= [A∙(p + 1/T) + B∙p]/[p∙(p + 1/T)], откуда
K/T = A/T + A∙p + B∙p = A/T + p∙(A + B).
Приравнивая коэффициенты в левой и правой частях полученного выражения при одинаковых степенях оператора р, получим:
K/T = A/T, или А = К;
А + В = 0, откуда В = -А = -К;
следовательно:
(K/T)/[p∙(p + 1/T)] = K/p - K/(p + 1/T) =
= K∙[1/p – 1/(p + 1/T)]. (19)
Переходя от изображений (19) к оригиналам простейших функций, получим выражение для переходной функции апериодического звена:
h(t) = K∙(1 – e-t/T). (20)
Корень характеристического уравнения в изображении (1/р) элементарной функции f(t) равен нулю (р = 0), поэтому ее оригинал равен:
f(t) = ept = e0t = e0 = 1.
Колебательное звено
Динамические свойства колебательного звена определяются дифференциальным уравнением второй степени и зависят не только от постоянной времени Т, но и от коэффициента (кси) ξ, называемого коэффициентом демпфирования, характеризующего степень затухания колебаний:
T2∙y′′(t) + 2ξ∙T∙y′(t) + y(t) = K∙ x(t). (21)
Представим уравнение (21) в операторной форме и найдем из него выражение для передаточной функции:
T2∙p2∙y + 2ξ∙T∙p∙y + y = (T2∙p2 + 2ξ∙T∙p + 1)∙y = K∙ x;
W(p) = y/x = K/(T2∙p2 + 2ξ∙T∙p + 1). (22)
С целью экономии времени в виду громоздкости вывода формулы для переходной характеристики приводим ее без вывода:
h(t) = K∙[1 – (e-ξt/T/r)∙sin(rt/T + α)] (23)
Здесь: r =  > 0 – условие наличия колебаний в звене;
> 0 – условие наличия колебаний в звене;
α = arctg(r/ξ) – фазовый начальный угол;
r/(2πT) = f – частота затухающих колебаний звена.
Весовую функцию g(t) колебательного звена можно найти, взяв производную от переходной функции h(t):
g(t) = h′(t) = (K/T)∙e-ξt/T∙[(ξ/r)∙sin(rt/T + α) – cos(rt/T + α)] (24)
Дифференцирующее звено
Характерная особенность дифференцирующего звена заключается в том, что значение выходного сигнала y(t) звена прямо пропорционально значению производной х′(t) от выходного сигнала х, т.е.:
у(t) = K∙ х′(t). (25)
или в операторной форме:
y = K∙ p∙x. (26)
Из уравнения (26) можно получить аналитическое выражение для передаточной функции дифференцирующего звена:
W(p) = y/x = p∙K. (27)
Принимая во внимание, что передаточная функция W(p) звена есть изображение L[g(t)] его весовой функции, можем написать:
L[g(t)] = p∙K (28)
Интегрируя выражение (28) путем умножения на передаточную функцию интегрирующего звена, получим изображение переходной функции дифференцирующего звена:
L[h(t)] = W(p)∙1/p = К∙1 (29)
Следовательно, h(t) = К∙δ(t) и при подаче на вход единичной ступенчатой функции x(t) = 1(t) функция выходного сигнала дифференцирующего звена примет следующий вид:
у(t) = h(t) ∙1(t) = K∙ δ(t) (30)
Тема 2.
Переходные процессы в САУ
В результате наличия переходных процессов в динамических звеньях САУ требуемое заданное значение регулируемой величины устанавливается не мгновенно, а в течение некоторого промежутка времени, называемого временем регулирования tp. Обычно принято временем регулирования называть промежуток времени, за который значение переходной функции h(t) достигает 95% от своего установившегося значения при h(t→∞) = K.
Следовательно, по виду кривой переходной функции САУ можно определить время регулирования tp.
Рассмотрим переходную функцию апериодического звена:
h(t) = K∙(1 - e-t/T).
Из приведенной формулы видно, что время регулирования для инерционного звена зависит только от значения постоянной времени Т и связано с ней приближенным соотношением: tp ≈ 3Т, так как
h(t) = K∙(1 - e-t/T) = K∙(1 - e-tp/T) = K∙(1 - e-3T/T) = K∙(1 - e-3) ≈ 0,95K.
Постоянную времени Т инерционного звена можно определить по графику переходной функции h(t), если провести касательную к переходной функции из начала координат. Действительно, производная от любой непрерывной функции в произвольной точке приближенно равна тангенсу угла наклона касательной к этой точке. Для переходной функции апериодического звена справедливо: h′(t = 0) = (K/T)∙ e-t/T = (K/T)∙ e-0/T = K/T = tgψ, где ψ – угол наклона касательной к h(t) в точке t = 0. При t = T значение функции h(t) = K∙(1 – e-1) = 0, 632K.
Для динамических звеньев второго порядка кривые переходных процессов могут иметь как колебательный, так и апериодический характер, который зависит от значения коэффициента демпфирования ξ.
При ξ< 1 переходной процесс носит колебательный характер; при ξ ≥ 1 переходной процесс носит апериодический характер.
Время регулирования tp для звена второго порядка также измеряется промежутком времени, в течение которого значение переходной функции h(t) достигает 95% от h(t → ∞), т.е. когда значение h(t) окажется в пределах от 0,95К ≤ h(t) ≤ 1,05К и в дальнейшем не выходит из них.
Для звеньев второго порядка время регулирования tp зависит не только от постоянной времени Т, но и от параметра ξ. Минимальное значение tp имеет место при ξ = 0,707, при котором значения функции h(t) носят затухающий колебательный характер, но не выходят за пределы 1,05К.
При меньших значениях ξ характерным для колебательных переходных процессов является превышение кривой переходного процесса над своим установившимся значением.
Отношение максимальной величины превышения [Δhmax = hmax – h(t → ∞)] к установившемуся значению h(t → ∞), выраженное в процентах, называется перерегулированием δhmax.
δhmax = Δhmax∙100% / h(t → ∞) = [hmax – h(t → ∞)]∙100% / h(t → ∞)
Время регулирования tp и перерегулирование δhmax относятся к показателям качества регулирования. Качество регулирования считается удовлетворительным, если δhmax ≤ (30 – 40)%.
Структура любой САУ определяется составом входящих в нее звеньев и способом их соединения. С помощью эквивалентных преобразований любую систему САУ можно привести к стандартному виду, свойства которой будут полностью определяться характером передаточной функции W(p).
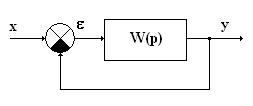
На рисунке представлена структурная схема САУ, состоящая из одного динамического звена с передаточной функцией W(p), охваченного жесткой обратной связью с коэффициентом усиления Кос цепи обратной связи, равным 1.
Передаточную функцию W(p), которая называется передаточной функцией САУ в разомкнутом состоянии, можно представить в виде произведения или суммы передаточных функций элементарных типовых звеньев.
Передаточная функция Wз(p) замкнутой САУ определяется по следующей формуле:
Wз(p) = W(p)/[1 + Кос∙ W(p)].
Для САУ, представленной на рисунке:Wз(p) = W(p)/[1 + W(p)].
По виду W(p) все системы САУ делятся на статические и астатические.
САУ называется статической, если ее передаточная функция в разомкнутом состоянии не содержит множителей (1/р), соответствующих операции интегрирования, т.е.:
W(p) = Ko∙Wo(p). (1)
Здесь: Ko – статический коэффициент усиления системы;
Wo(p) – рациональная дробь, которая при р → 0 стремится к 1.
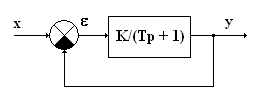
Например, к статической системе САУ можно отнести систему, состоящую из апериодического звена, охваченного жесткой обратной связью:
W(p) = K/(T∙p + 1) = K∙[1/(T∙p + 1)] = Ko∙Wo(p)
Здесь: Ко = К; Wo(p) = 1/(T∙p + 1).
Основное свойство статических систем наличие установившейся ошибки εуст = хо – ууст ≠ 0 при t → ∞.
В статических системах установившаяся ошибка системы может быть определена по формуле:
εуст = хо/(1 + Ко) (2)
Из формулы (2) следует, что с увеличением коэффициента усиления Ко (при хо = const) статическая ошибка уменьшается, т.е. точность системы увеличивается. Однако увеличение коэффициента усиления приводит к увеличению перерегулирования и колебательности системы. Поэтому в статических системах САУ не всегда возможно получить требуемые качество переходного процесса и точность регулирования.
САУ называется астатической, если ее передаточная функция в разомкнутом состоянии содержит множитель (1/ps), т.е.:
W(p) = Ko∙Wo(p)/ps, (3)
где s – порядок астатизма системы.
Например, к астатической системе САУ первого порядка можно отнести систему, состоящую из интегрирующего звена, охваченного жесткой обратной связью:
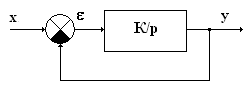
W(p) = K/p = K∙(1/p) = Ko∙Wo(p)(1/р)
Здесь: Ко = К; Wo(p) = 1; s = 1.
В астатических системах установившаяся ошибка εуст равна нулю при любом значении коэффициента Ko. Поэтому коэффициент Ko можно выбирать только исходя из требований к качеству переходного процесса.
Как следует из формулы (3), астатизм вводится в систему САУ путем последовательного включения одного или s интегрирующих звеньев. Например, астатическую систему САУ можно получить, если последовательно с инерционным звеном включить интегрирующее звено:

Принимая во внимание, что передаточная функция системы, состоящей из последовательно включенных звеньев, равна произведению передаточных функций отдельных звеньев, составим формулу для передаточной функции разомкнутой системы САУ:
W(p) = (K1/p)∙[K2/(T∙p + 1)] = K1∙K2∙(1/p)∙[1/(T∙p + 1)].
Здесь: Ко = K1∙K2; Wo(p) = 1/(T∙p + 1); s = 1.
Передаточная функция для ошибки равна:
S(p) = ε/x = (T∙p + 1)∙p/[(T∙p + 1)∙p + Ко] (4)
При постоянном сигнале х = хо = const установившееся значение ошибки находим по формуле εуст = S(p = 0)∙ хо. Из формулы (4) следует, что S(p = 0) = 0, а, следовательно, и ошибка εуст = 0 при любых постоянных значениях хо ≠ 0 и Ко ≠ 0.

