




Различают модели: а) линейные и нелинейные; б) статические и динамические; в) детерминированные и стохастические (вероятностные).
С точки зрения свойств области, в которой представлена модель, различаются модели: а) временные — непрерывные либо дискретные; б) аналоговые либо цифровые (т. е. область значений может создавать множество, непрерывное либо дискретное).
Кроме того, с точки зрения способа определения различаются: а) физические (физико-химические) модели; б) статистические модели.
Математическая модель ИС, как показано на рис. 3.1, в,имеет общий вид
y=F(x1,…xm-1,xm,T,a1,…,ak,z). (3.8)
Величины x1,...,xm представляют собой случайные процессы с известными или неизвестными характеристиками; они могут быть измеримыми либо неизмеримыми, управляемыми либо неуправляемыми — в зависимости от цели и условий использования ИС. В уравнении (3.8) Т обозначает время эксплуатации ИС. Если в этом нет необходимости, то время Т в модели игнорируется. Величины a 1,…, ak — конструктивные параметры ИС. Величина z характеризует неточность модели, а также неизвестное или неучтенное влияние окружения ИС.
По cвoeй природе z — неизмеримая и неуправляемая величина, и часто принимается Ε(z)=0. Величина у — выходная величина ИС; обычно можно ограничить модель случаем одной выходной величины.
Математическую модель образуют оператор F, а также конструктивные параметры a, описывающие связь между входными и выходными величинами. Параметры aj (j =1,..., k) характеризуют свойства элементов, из которых построена ИС.
Статическая модель
Модель называется статической, если входные величины реализованы в виде отдельных точек. Тогда оператором F служит функция f, а именно:
y=f(x1,…,xm). (3.9)
Такие повсеместно применяемые статические модели являются детерминированными, т. е. предполагается, что конструктивные параметры a1,...,ай стабильны, а величина z = 0. Каждому набору входных величин соответствует одна точка выходной величины.

Рис. 3.2. Аппроксимация характеристики аналого-цифрового преобразователя линейной функцией: а — действительная характеристика; б — аппроксимация; в, г — погрешность аппроксимации

Рис. 3.3. Аппроксимация характеристики квадратичной функции линейными отрезками: а — схемадиодного квадратора; б — действительная (кусочно-линейная)и идеальная (непрерывная) характеристики; в — погрешность аппроксимации
Важнейшая зависимость
y0 = f0 (x) = f (x 10,…, x ( m-1 )0, x),(3.10)
установленная в условиях сравнения xi0 при i= 1,2,.., m- 1, называется характеристикой ИС.
Функция f 0 может быть линейной или нелинейной. Для некоторых нелинейных характеристик используется функциональное преобразование переменных, затем, чтобы найти линейную характеристику, например: u=+  , lg(y), arcsin(y)и т. д.
, lg(y), arcsin(y)и т. д.
Нелинейные модели довольно часто заменяют линейными моделями либо линейными отрезками, как показано на рис. 3.2. На рис. 3.3 показан обратный случай, когда действительная характеристика, представленная линейными отрезками, аппроксимируется квадратичной функцией, из-за чего погрешность аппроксимации имеет противоположный знак.

Рис. 3.4. Способы аппроксимации нелинейной непрерывной характеристики:
а — по касательной; б — по хорде; в — по секущей
Аппроксимация модели влечет за собой необходимость оценки погрешности этой операции, которая зависит от способа аппроксимации. Так, например, линейно-кусочную аппроксимацию функции можно производить различными способами (рис. 3.4); при этом ошибки аппроксимации будут разными. Погрешность может быть минимизирована путем выбора способа аппроксимации и числа отрезков.
Кусочно-линейная аппроксимация применяется все чаще по соображениям простоты численного моделирования на ЭВМ. Характеристики модели записываются при этом в виде координатных узлов. Детерминированные модели используются для описания идеальных свойств ИС или в качестве первого приближения в описании реальных ИС.
Тот факт, что ИС предназначена для нахождения измеряемой величины x, не всегда вызывает ослабление зависимости выходной величины у от воздействующих величин x1,…,xm-1.
Таким образом, модель ИС может быть функцией многих аргументов, т. е. обычно нелинейной функцией. Поэтому используются разные аппроксимации, например
f (x 1 ,…,xm)= f 1(x 1) f 2(x 2)… fm (x). (3.11)
В вышеприведенных моделях нет ограничений свойств множества входных и выходных величин — в принципе это непрерывные (плотные) множества, т. е. аналоговые величины. Как показано на рис. 3.2, и входное, и выходное множества могут быть дискретными множествами. Появление дискретных множеств не затрудняет записи характеристик ИС; лишь в дальнейшем область этой функции (не убывающей либо не возрастающей относительно аргумента х) должна быть точно определена. Если выходная величина дискретна, то ИС и ее модель называются цифровыми. Выходным множеством тогда является множество целых чисел (либо его подмножество), умноженное на определенный квант q этой величины, а именно:
y = Nq, (3.12)
N = 0, ±1, ±2..... q>0.
Измеряемая величина x может быть дискретна, например, x = Nqx, а y=Nqy. При этом имеет место равенство
qy= f0'qx, (3.13)
если в диапазоне кванта производная f0'=dy/dx постоянна.
Кванты для величин x и у могут не быть постоянными. Величина у в цифровых ИС реализуется в натуральной форме либо в форме кода. Физическое состояние и запись зависят от типа кода. В общем виде
N=ytw, (3.14)
где для двоичного кода
y =[ yn yn-1 ... y1 y0 ], (3.15)
w =[2n 2n-1 … 21 20], (3.16)
причем компоненты вектора у приобретают значение 0 либо 1.
Динамические модели
Модель является динамической, если входные величины реализуются в форме множества, т. е. именно входные величины представляют собой непрерывные либо дискретные временные процессы. Выходная величина также является множеством. В любой данный момент времени реализуется один элемент этого множества.
Динамические модели в зависимости от способа их формулирования могут быть разнородными. Вывод модели из уравнений физики позволяет записать дифференциальные уравнения. Обычно используются уравнения Лагранжа, Максвелла, Кирхгофа, законы термодинамики, законы сохранения и т. д., либо частные уравнения физики. Если конструктивные параметры a1,…,ak постоянны и z  0, то модель детерминирована.
0, то модель детерминирована.
Для данного конструктивного элемента ИС выходная величина у зависит от возмущения х, а также производных х, у, а именно:
y=f( ). (3.17)
). (3.17)
Взаимодействие многих элементов системы приводит к увеличению порядка дифференциального уравнения, а также к его усложнению. Получается одно либо несколько уравнений типа
F ( , y,
, y,  y(n))=0. (3.18)
y(n))=0. (3.18)
В общем виде это нелинейная модель. Особый класс составляют линейные модели, в которых дифференциальное уравнение является линейным уравнением с постоянными коэффициентами.
Удобной формой представления динамической модели является уравнение состояния ИС:
dy/dt=f(y, x), (3.19)
или, в матричной форме, непрерывное
 = dy/dt =Ay+Bx (3.20)
= dy/dt =Ay+Bx (3.20)
или дискретное
y (n+1)= Ay (n)+ Bx (n) (3.21)
во времени, где n обозначает очередные моменты времени (точная запись имеет вид: y(n D t); n=0, 1, 2...). Достоинство уравнения состояния заключается в удобстве перехода к воспроизведению измеряемой величины х на основе у.
Другой способ формулирования модели вытекает из математического подхода. Отображение множества X в множество Y осуществляется с помощью оператора F. Для линейных систем часто используется линейный оператор Вольтерра:
y(t)=F0 [X(t)]=  (3.22)
(3.22)
где k(t, τ) — ядро оператора, которое соответствует отклику системы на импульсное возбуждение.
Нелинейные системы описываются нелинейными операторами. Так, например, оператор Хаммерштейна
y(t)=FH [x(t)]=  (3.23)
(3.23)
позволяет описать системы, которые можно представить как последовательные соединения нелинейного статического и линейного динамического элементов с откликом на импульсное возмущение k(t, τ), как это показано на рис. 3.5.
Описание ИС с помощью операторов удобно для анализа и интерпретации результатов экспериментального определения системы. Поскольку отклик на импульсное возмущение прост для наблюдения ирегистрации.
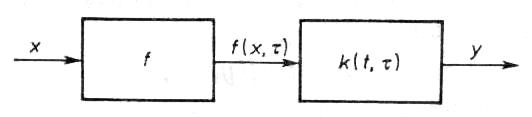
Рис. 3.5. Схема модели, описываемой оператором Хаммерштейна
Важную группу составляют нелинейные модели, в которых сигналы модулируются и кодируются. Модели таких элементов ИС можно разделить на две категории:
1) физическая модель, описываемая входными и выходными величинами с такими структурой и временным процессом, какие имеют место в действительности;
2) физическая модель отображения измеряемой величины во множестве входных и выходных величин данного элемента, т. е. представленная в области значений измеряемой величины[9].
Для оценки метрологических качеств наиболее важны модели второй категории, так как в области значений измеряемой величины выражаются и погрешности. Происходящие же в каком-либо элементе ИС физические явления можно описать только моделью первой категории, поэтому оба типа моделей рассматриваются совместно, как это представлено на рис. 3.6.

Рис. 3.6. Отображение измеряемой величины с помощью сигналов
Символом и обозначен натуральный входной либо выходной сигнал элемента у=х* — отображение x в области измеряемой величины. Физическое преобразование описывается уравнением преобразования y =F(x), отображение в области измеряемой величины дает процедура x* = f –1 (y)). При определенном навыке в записи этих моделей применяют упрощения, основанные на выражении физических сигналов в области измеряемой величины. Такой способ моделирования относится к аналоговым нелинейным системам с модуляцией сигналов, а также к цифровым системам, действующим непрерывно и циклично. Способ моделирования иллюстрируют приведенные ниже примеры.
Модулятор амплитуды. Блок-схема и структурная схема модулятора представлены на рис. 3.7. На рис. 3.7, а символ f означает преобразование величины x в величину у по уравнению
y = xu, (3.24)
где
u = A sinw0 t, [10](3.25)
так что уравнение
y (t) = x (t) A sinw0 t = f0 (x) (3.26)
является идеальной моделью модуляции.
Реальная модель будет несколько иной, а именно f(х). Отображение состояния входа дает следующий результат:
x  =
=  (y)= f0 -1(y)= f0-1 [ f (x)]. (3.27)
(y)= f0 -1(y)= f0-1 [ f (x)]. (3.27)

Рис. 3.7. Схема модулятора амплитуды:
а – блок-схема; б – структурная схема

Рис. 3.8. Кольцевой модулятор:
а — принципиальная схема; б — гармоническое распределение выходной величины. Номерами обозначены спектры, соответствующие членам формулы (3.35г)
Применение кольцевого модулятора  по схеме, показанной на рис. 3.8,а, базируется на модели
по схеме, показанной на рис. 3.8,а, базируется на модели
y1= (x-  u) 2=x2-xu+
u) 2=x2-xu+  u2, (З.28а)
u2, (З.28а)
y2= (x+  u) 2= x2+xu+
u) 2= x2+xu+  u2, (3.28б)
u2, (3.28б)
y0=y2-y1= 2 xu. (3.28в)
Фактическая характеристика выпрямителей отличается от квадратичной, ввиду чего вместо m =2 характеристика имеет «форму
у1=  (3.29)
(3.29)
Модулятор частоты. Блок-схема модулятора представлена на рис. 3.9. Уравнение идеального преобразования имеет вид
y0 = A sin[(w0+ x) t ], | x |<< w0 , (3.30)
где у=А sin wt.

Рис. 3.9. Блок-схема модулятора частоты
Процедура воспроизведения x на основе действительного выходного сигнала у следует из (3.30), а именно:
x *=а[(1/ t)arcsin(y / A)- w 0], (3.31)
где а — степень свободы процедуры градуировки.

