




Настройкой контура на ОМ называется синтез регулятора с целью получения динамических характеристик замкнутого контура, близких
к характеристикам колебательного звена с относительным коэффициентом затухания  =
=  = 0,707, перерегулированием
= 0,707, перерегулированием  = 4,3 %, запасом устойчивости по фазе
= 4,3 %, запасом устойчивости по фазе  º, временем нарастания
º, временем нарастания  = 4,7 Т Σ.
= 4,7 Т Σ.
При настройке контура на ОМ осуществляется компенсация больших постоянных времени силового канала ЭП и динамические процессы будут определяться суммарными малыми постоянными времени  контура.
контура.
Любой контур считается настроенным на ОМ, если его передаточная функция в разомкнутом состоянии имеет вид:
 =
=  , (2.1)
, (2.1)
где
 = .
= .
Рассмотрим синтез регулятора применительно к неизменяемой части ЭП, которая описывается передаточной функцией:
 =
=  , (2.2)
, (2.2)
где Тi – компенсируемые большие постоянные времени контура.
При выполнении условия:
Т i >> , (2.3)
второй сомножитель (2.2) можно записать как:
 , (2.4)
, (2.4)
тогда передаточная функция неизменяемой части ЭП:
= 
 . (2.5)
. (2.5)
При последовательной коррекции передаточная функция регулятора:
 =
=  . (2.6)
. (2.6)
После подстановки в (2.6) выражений (2.1) и (2.5) получим:
=  ,
,
или
=  , (2.7)
, (2.7)
где К p =  ;
;  ; Т p – параметры регулятора.
; Т p – параметры регулятора.
В качестве примера настройки на ОМ, рассмотрим настройку контура скорости (КС). ССДМ КС изображена на рис. 2.1.
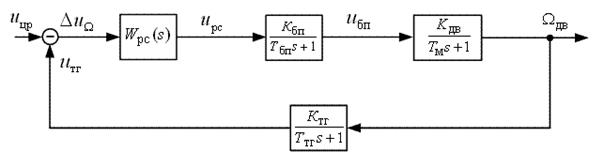
Рис. 2.1. Структурная схема динамической модели контура скорости
Передаточная функция неизменяемой части КС запишется в виде произведения передаточных функций блока питания, двигателя и тахогенератора:
=  .
.
Электромеханическая постоянная времени двигателя Т м является постоянной времени, подлежащей компенсации.
Постоянные времени блока питания (БП) Т бп и тахогенератора (ТГ) Т тг являются малыми постоянными времени, и их влияние сказывается на высоких частотах, поэтому произведение инерционных звеньев с малыми постоянными времени можно заменить одним инерционным звеном:
 , (2.8)
, (2.8)
где = Т бп + Т тг – суммарная малая постоянная времени КС.
С учетом приближения выражение (2.8) примет вид:
=  . (2.9)
. (2.9)
С применением формулы (2.6) определяем передаточную функцию регулятора скорости (РС):
 ,
,
где передаточная функция настроенного на ОМ разомкнутого КС:
 . (2.10)
. (2.10)
Тогда
 =
=  .
.
Переписывая передаточную функцию РС в стандартном виде, получим:
=  , (2.11)
, (2.11)
где Т рс = Т м, а К рс =  .
.
Полученная передаточная функция РС описывает динамические свойства ПИ-регулятора.
Согласно (2.10), передаточная функция замкнутого КС:
 =
=  . (2.12)
. (2.12)
Перепишем (2.12) как:
=  ,
,
где Т кс =  – постоянная времени КС;
– постоянная времени КС;  =
=  = 0,707.
= 0,707.
На рис. 2.2, 2.3 показаны стандартные графики ЛЧХ и переходной характеристики при настройке на ОМ, полученные по выражениям (2.10) и (2.12). По графикам определяем показатели качества КС, настроенного
на ОМ: запас устойчивости по фазе  º, перерегулирование = 4,32 % и время нарастания переходного процесса t н
º, перерегулирование = 4,32 % и время нарастания переходного процесса t н  = 0,47 с..
= 0,47 с..
Настройка на ОМ позволяет получить достаточное быстродействие при небольшом перерегулировании. В ряде случаев, когда требуется получить повышенное быстродействие и точность системы, применяют настройку на СО.

Рис. 2.2. Стандартный график ЛЧХ при настройке на оптимум по модулю
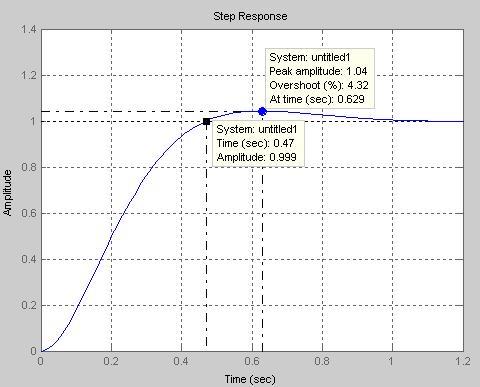
Рис. 2.3. Переходная характеристика  при настройке
при настройке
на оптимум по модулю

