




It i оометрии режущих инструментов имеется большое количество i i-i, w которых положение секущей плоскости задается либо линией ^•оичония секущей плоскости с координатной плоскостью и осью ко-
...... it, либо двумя линиями пересечения, например, линией ОЖ и осью
Mv или линиями ОЖ и ОЕ (см. рис. 2.15,а).
Методика решения задач в этом случае практически не отличается I от приведенной ранее:
1) устанавливают уравнение секущей плоскости с помощью определителя третьего порядка;
2) находят координаты линий пересечения секущей плоскости с двумя другими плоскостями;
3) определяют угол между линиями пересечения. „
Для случая, когда секущая плоскость проходит через У„ и ОЖ,
при определении угла между передней поверхностью и плоскостью X yQZ у поэтапно имеем:
1. X sin д - Z cosu = 0;
2. f[cos&cosX cosy; - (.- sinAstnA'Cosi' + cosucosAsLn.ipjsiftAcosJlcosy],
LCcosu; 0; sin д);
| (2.53) |
| HI |
| f |
cos Д tqv - sin Л tq X.
При Д= О toy д = tav г т,е. секущая плоскость в этом случае совпадает с главной секущей плоскостью..
Рассмотрим случай, когда секущая плоскость проходит через ось У у и линию пересечения главной и вспомогательной задних поверхностей OF (см. рис. 2.12). Определим угол между проекцией OF на плЛ кость XyOLy и осью Ху
Уравнение главной задней поверхности:
X(ctoetcostp-toJCsvH(f)+ y-Z,(ctQotsin^ + toA.cos4f) = О
или
Хо, + 9 - /Ц = 0.
Уравнение вспомогательной задней поверхности: X (taA.1sinif1+ cto<i1c05qj1)+ У + ZCctQcLlsiH43-t<iA,1cos<f,) = 0
| или |
Хаг + У + %сг» 0 •
Координаты линии пересечения задних поверхностей:
DF = [Сс,+ сг);- (^o^ajC,); (a, - аг)]. Координаты проекции вектора OF на плоскость XyOZy".
QF/Xv0Zv= [(с,+ сг); 0; (а,- аг)]. Угол ш между осью Ху и проекцией линии пересечения задних пс верхностей OF/Xy 0Z у найдем по зависимости:
сг
| "УСс,+ сОг +• Са,-аг)г' |
cos (О
| U2 |
о, -
SttvOJ =
Чс^+с^Чса,- аг)г "
a,-cu ctaAcosq>- tgXsvnip-tg AjStnq^-ctgdycosify 3 С\ + Ь1 ctqAsinif +toA,cos4?+ctq°4*in4>1- to^ cos'tp.,
2.5. ПОВОРОТ РЕЖУЩИХ ИНСТРУМЕНТОВ В СИСТЕМЕ КООРДИНАТ
2.5.1. Общие матрицы поворота
I '.'и осмотрим изменение координат вектора, проведенного из начала |рдинат, при повороте его относительно осей системы координат. ' рлчиваемый вектор представляет собой сумму двух векторов —
собственных проекций на ось координат, относительно которой 'I (водится поворот, и на координатную плоскость, перпендикулярную
и поворота., Дли вектора ОВ (см. рис. 2.13,а), например, имеем:
____ ob=ob/xoz + о^/У = oS/xoa + o5/z = OB/yoz+ ОВ/Х.
| | |
ц|н'мя поворота вектора относительно оси координат проекция век—
i на ось остается неподвижной, а проекция его на плоскость пере-
""...... тся по окружности.
положительное направление поворота, как это принято в курсе й математики, принимаем поворот вектора против часовой стреляй смотреть со стороны отрицательного направления оси, отно-,но которой производится поворот.
ч-мотрим поворот вектора О В относительно оси 9. При повороте овой стрелке (рис. 2.16,а) проекция вектора на плоскость X0Z ожения 0В' = (Хо; 0; Z0) переходит в положение 0B.j= (X^OJZ,). том сам вектор из положения Оо* (.Хо; У„^ % 0) переходит в по— икс 0В*ц= (X; У; Z, ). Найдем значения новых координат век-г | 0В. Для случая поворота вектора 0В относительно оси У на I i J3 зависимости для расчета новых координат вектора будут выг-i ж*"|ь следующим образом:
| у у0; |
| X. = R cos (л. |
| РУ: |
Z, = R sin (Д, -J3).
| ■; sin^s |
__ ___—,.------------ *°___ • sl«.A.=--------- -°
У О
| т |
| tx> |
| ч |
Ы
U

|

|
| B'Uo.O'.Zo) |
| Ва(0;Уг'Дг) |
| B4o;y.;z<) |
| Bcm(Xi'.o;zi) |

| B4Xo;o;zo) |
;£з
| и | |||
| в'(х«;У2',о)\ | х2 | ""т\ | /У» |
| ВЫХзЖ | ))\ | %ъ/ |
Рис. 2.16. Схема поворота вектора в системе координат: а - относительно оси У по часовой стрелке; б - относительно оси У против часовой стрелки; в — относительно оси X против часовой стрелки; г относительно оси Z. против часовой стрелки
После подстановки получаем:
%*%', —Xt=Xgco3j> + Zeitn$; U,sZ0cos-j»-XeelKj».' (2.55) Рассмотрим поворот вектора О В против часовой стрелки (рис.
2.16,6):
Ч ж У •
т X, = Rsltv (Д, + JJ)= Z0cosj» + X0sinja. ivt.56)
При подстановке в (2.56) отрицательных значений угла поворота,что соответствует повороту вектора по часовой стрелке, получаем систем
уравнений (2.55).
Аналогично (2.55) и (2.56), при повороте вектора О В относите,
■О оси X против часовой стрелки на угол <о имеем (рис. 2.16,в):
t Уг=а$1к (Дг+ ЗГ) = U,cosS + Z,siHQ';
-*%г=- Rcos(iz + «)= 1ttosS - 9, svnff. (2.57)
Повернем вектор OB относительно оси Z на угол X против часовой стрелки (рис. 2.16,г):
£j * 2г; (l)tXjs Rsih, (л3 + х)= Хгсо5<с+ Уг»*«,т;
S 9j = Rcos (д3 + г)= Угсо5т: - Хгв1лЧГ. (2.58)
Зависимости (2.56)-(2.58) справедливы также для расчета координат векгора при повороте непосредственно системы координат в сторону, противоположную повороту векгора.
При повороте вектора О В по часовой стрелке, а системы координат против часовой стрелки значения углов в, j», tr необходимо в системах уравнений (2.56)-(2.58) брать с противоположным знаком,
■ читая, что поворот производится на величину отрицательного угла.
Анализ различных схем поворота тел и режущих инструментов в
■ in теме координат показывает, что для поворота режущих инструмен—
РОВ наиболее приемлема схема У — X — 2.. По сравнению с известной
схемой поворота У— X — У', разработанной Эйлером, при повороте по схеме У — X — % относительно каждой из осей производится, как минимум, один поворот, что имеет положительное значение при исследовании геометрии рабочей части инструментов.
Составим общую матрицу поворота по схеме У - X — *.
Для первого поворота на угол (8 относительно оси 9 (системы X9Z по часовой стрелке, векгора О В против часовой стрелки) имеем:
"i = Уо 1 -*■ Х1= X0co3j3-Z0stnja |
| t I. |
| COS |
| Р- |
| (2.59) |
| ля второго поворота относительно оси X на угол <5 |
,SiHjD + £0
| w |
X0cosjd - 10 sinja;
-*■ 2г= Z,cos6- y^eiri.6 = (X0siH.J3 + Z0cosj3)cosS'- 90siH(o; t 9z=Z.,sin<5 + b1cos6' = (X0sin.p+20cosj))sinG+ У„cos€Г.(2.60)
1ля третьего поворота относительно оси Z на угол V:
| f У= а"со««- z"si»v<?. Поворот относительно Z на *■■ Z"1; I X"=Xmco»-c-ymsivc; |
| (2.64) |
| (2.63) |
SL = У^соз* - Х,*1кТ = [(20cosj!> + Xosi,tiJi))$vn^+ yocosS3cost-(Xecosj3-
-Iesir,j5)SiK<t; (2.6.1)
Xj= XjCost; + aj9v«,(C = (X0cosjs-Z0sltvJ>)costi-[Czocosja + X0»in,p)sinS +
+ yocos(s]svn.<C,
В итоге общая матрица поворота вектора или системы координат схеме У — X — Z имеет вид:
Х, = Х =X0(.cospcos'S+sin,p6iH'B')+ Ujcosefsinli 4
| (2.62) |
+ Z0{tosp *{,*,<$ tint - siKjacost); У}= y'=X0(slnp sin.Scos'B-cosp stu<o)+ yoeos6cos<C +
+ Z,o(coeip»in.«fcosc3+ sitvp»itvt); Z =Z a Z0coejs cos£ •+ X.sCttj9co6(if- ЧсЫп<3,
где X., Я, %.— новые координаты точки вектора в старой системе
X У Z > X'" i Ут. X1"- координаты точки вектора в новой повернуто системе координат X У!«,„_„». -
Задачи на поворот системы координат относительно режущего инструмента связаны также с выражением старых значений координат рез новые. Рассмотрим методику такой замены для случая последов тельного поворота системы координат по схеме У — X — Z (рис. 2.1
б,в,г).
1. Поворот относительно оси У на угол+jj:
| / |
У0=У;
| t |
i,Z0=X'co5js- x'siwp;
_Х =X'cos^ + Z'siHja.
2. Поворот относительно оси X на угол +6:
Х'=Х" | /
угол ум •»
| 7 (2.65) |
/
Ч~у
В У"=У'"соа<Г <-X'"svni!.
T
Xui хи
Общая матрица для выражения старых значений координат через 1>вые при повороте системы координат по часовой стрелке по схеме - X — Z приобретает следующий вид:
У >У'=у"соа«5- Z"siH<?«ty"Wt + X",Stne)cosS- Z'"»in<J;
О
Z,0=Z'coeja- X'»vnj3=(.Z"eo»<?+y"»in(5)co4j>- XHiiWjp «= [Ус> + ty"»»li t Х,и*1*.1П»in«]cosj3-(X,,'cos'E-y,,,siH/!r)sifvp =
В X"eos(ocosp+ 9mcos'CcospSia^ + Xsvn'Scospei<it(J-XmcoS'o eitvj> + + В1И51лЧ! stnjs = X"1C»in'Coosp9in6'-coe4JsiKj»)+ymCco»T;cotjsco»ff +
+ sim;*<,nj5)+ z'"co»S cosj»; X0-X'cosja+5t19inj» = X,,coeja + (Xllc(JS<3+ y"9inef)8ittjs =
= (Xmcos'D- 9"'siw,<Oco4p + [z'"cos(S + (y'"costitX",»iH<c)»vtv^]sUj3 = = Xcostcosp- y'"stn.T;co»,p-t-Z"ko9<5»inp+ y"cos<B»iti€»i«,_p + +Xll,sin1svu<S»l«,j» = X' (costeoep+ sin's SiПб SiHp) +
+ yl"tcos,esiH(JsiH(S-Si.n'C tosja)+Z oosSsinp. (2.66)
При повороте вектора или системы координат по любой другой схе-0 значения координат Х3, Уд, 2, и X'", У"', Z'" в матрицах поворо-
будуг другими.
Рассмотрим пример. Пусть единичный вектор О С, лежащий на оси X, поворачивается в системе координат X У Z один раз по схеме $ - X, а другой - по схеме X - У.
На основании (2.56)-(2.58) имеем:
_^Х'=1*со5б+ y"si«,<a;
Ч
0C<(.n-af^i=cos6sin-!8' 9г=в1н^; Х^созрсозб). Это происходит потому, что б1, т; i га — углы поворота не самого вектора О С, а его проекций на соответствующую координатную плоскость (в зависимости от схемы поворота).
2.5.2. Примеры поворота режущих кромок и рабочих поверхностей инструмента в системе координат
Приведенные выше матрицы поворота справедливы для любой системы координат. Поэтому при рассмотрении примеров поворота будем исходить из некоторой произвольно взятой системы координат X J Z, в которой кромки и рабочие поверхности определяются координатами, характерными для базовой системы координат ХуУу£у.
Рассмотрим в качестве примера изменение координат вектора, перпендикулярного к передней поверхности резца, и единичного вектора, лежащего на главной режущей кромке, при некоторых видах поворота резца в системе координат.
2.5.2.1. Поворот относительно оси У на' угол +ja.
Исходные данные:
1. Уравнение передней поверхности:
X cos(.if + е)+ УоЦу cose- Z siu tf + t),
где v^irV-
2. Координаты единичного вектора, лежащего на главной режушей
кромке:
ОЙ* XXX = (cos A. svntp; si.fi A; cos X cosif).
При повороте вектора OB относительно оси У на угол +jj (0 = О и 1 * О) новыми координатами его в соответствии с (2.62) будут:
X.= coslstH((!cosij>-cosl<uOS^ siup = cos J, siuC^- J3)',
4,= sin X;
X, = cosAcosipcos,p + M>sA.si'H,ip sin.j»=oosA,cos Cif-J»);
OB. tX^X = [cosAsi-tvOf-p^sinV, cos A. cos (.if-ja)].
Вектор П > перпендикулярный к передней поверхности, имеет следу ющие начальные координаты:
П£ ХУХ= [cos (if + ty, ctoj cosf,-sinlip + E)]= (а; в,- с). При повороте резца в системе координат X У Z относительно оси У на угол +js новыми координатами вектора tt. станут:
Чт)бт= <% 6г-с<>;
a1=cos(4,+ e)cosjs+ Svh ce+(p)siHjs = соэ(ц>+ e-j») = cosCP-f-e); f^ctgycoee;
c1= coscif+eisitt-j» -sinc*f + e)cosj» = sincja-f - e)-
2.5.2.2. Поворот относительно оси X
Для получения новых координат можно воспользоваться уравнением (2.62).
Применительно к уравнению передней поверхности имеем:
a^= cosCif+E);
в, = cto у cos е совв - sin Сч+ е) silts';
с, =- sin Ctf+e) costf - ct<jj- cos £ si«,e\
оотвегствующим образом изменяется и уравнение передней поверхнос-
XcosC(f+e)+ У [cto г cosecos<5-aittC(p+e)&i.n6]--Z [ei,HCif+t)cos6+ cta^cose sin <э] = 0
2.5.2.3. Поворот относительно осей V - X -Z
Рассмотрим э тот случай на примере поворота единичного вектора QB, лежащего на главной режущей кромке:
X, = coslsinif«:osjacos't + Si/Uj9si,u6 st*U)+ sln.A.cosdsin(o + + oos^cosi^(,-svtvj» cosTi+ cosjssinS sitvt) = = cosJlsirtu>cos<peostC -cos^sltup sin. <3 s^"-^ sittja +
+ Sin Д, COS ^Sin<C-C0sXcOSip StttjD COS'S + cosJ.coefpcosjOsitidsln.'Cs scoS^CoST: Sitv(lp-ja) + COsl SiHirs;.tv6coS((j>-p)+8irtlcOSd.S{.n'(7;
I
НН
У =-coslsin<f cosjjsWC + coslelnipeifipstnffcos'o + -t-svnAcosScost; + cos A- cosip cosp sitt£ cost +
+ cosAcostf slnpsvnT; =-cosAsi»v'CaiiKC4'-j») + + cosAsiftefcos'ocosc<p-ja) + SiH Л cost» cost; ZjecosA6in<f>sinpcos<» + coslc«s<f cosecos^~sin4,siw^ = =*cosA cos6 cosc<f-jo)-siw A- sin(3. В результате единичный вектор OB, лежащий на главной режущей кромке, после поворота его в системе координат X УХ против часовой стрелки по схеме У — X — Z получает следующие координаты:
cos A cost «ia (4>-j8)+ cosAsin'Min6cOS(ip+jB)+- + sinA cos <5 sin's;
| *.(y-*-Z) |
+ cOsXsin<CSvnCtf-J>); cosAcoegcos cif-j'J-iittAstne'-
ft
| ки получаем: |
Аналогично при тех же условиях для вспомогательной режущей кром-
Of eXU eCcos^sin^i-svn^ ', -cos^coscp,). cosA1costCsln(ip1+j3)-sinA1cos<9 svnt -
| (2.68) |
| 05<й-х-г)бХ^=^ |
- cos Of,+J») cos A-1 sin б si n't; -(cos с^+рэсоаЛ-^пбсовт; + + cosA-1eiH'usirt(tfl+j8)+cos(ocos'0sinA1; sin A, sIk(o - cos^ cos <S cos C^ + J»).
2.5.3. Изменение в процессе поворота
углов,характеризующих положение режущих кромок
Рассмотрим изменение углов, характеризующих положение режущих кромок инструмента, на примере поворота рабочей части резца относительно системы координат.
Выведем формулы для расчета величины углов наклона главной и вспомогательной режущих кромок после поворота резца по схеме У - X - * ■
Найдем углы 1.^.х.., и Aw м_х-т) • Для этого воспользуемся координатами грех единичных векторов:
J - (О; 1; О), лежащего на оси У системы координат X У Z, 06 и 02, расположенных на главной и вспомогательной режущих кромках.
Угол Ai (N_y- г) определим исходя из того, что угол между j и новым расположением О В равен 90 — Хл (n-x-ZI •
Так как j»(0; 1; О), а Ов*(у_х_х) m^V *V ^8 '* полУчаем:
cos[90»-X<(s.x.X)] =
Поскольку выражение "^ (Х«)г + (У,)г+ (Z,)*'"м 1» получаем: sUA^ ty_x^,)=siftAco*6co5,C +
+ cosAsin6costcosc<f-vp)-cosXsin'E Ctf-j»). (2.69) t По аналогии, используя новое положение единичного вектора OIL л. „ _., лежащего на повернутой вспомогательной режущей кромке, j «(О; 1; О), значение угла А^. («.X-Z5
и ко'ордйнаты вектора
определим исходя из следующего соотношения
А,
s*HA1{(SI_X-i)=c0SCtp1+j3)C0sA,1sin(acos,G *
+ cosA1SvH'o svh((j>i+j3) + c0s6cos'C8vhA.1. (2.70)
Частные значения углов наклона главной и вспомогательной режущих
кромок (например, А^ tx);^К1У) ■ ^f QC-Z) > ^11 СX-Z) и г'д") вытекаю' из полученных выше уравнений (2.69) и (2.70) при условии, что в
зависимости от схемы поворота некоторые из углов поворота (J8, д?, «С) принимаются равными нулю.
Частные формулы можно получить также путем решения задач непосредственного поворота. Определим, например, величину угла
А^ w', ОБ = Ccos A, sin у,; - sin А,; - cos A, cos cpn).
После поворота относительно оси X имеем:
| (2.71) |
X^cosA,- sin<f.,; a^-sinXtCOsS-cosA^cos^sinS; Zs-- cosA^os^cosS +sinA1sin6;
| ОБ |
| UX) |
C*1» M> ^1'i
svnA1l№= siw^costf + cosi, coscf1 sine.
Зависимость (2.71) полностью совпадает с (2.70) при JJ •* О и
Определим величину углов в плане режущего инструмента <р^ («_«_,. ( %i (м-х-г) • <~>ни Располагаюгся между проекциями режущих кромок на плоскость'XOZ и направлением подачи, которое в большинстве случаев совпадает с положительным направлением оси Z системы координат.
Найдем угол между проекцией вектора ив на повернутую плоскость и XOZ* ty-%-z,) и единичным вектором, лежащим на оси Z, т.е.
В новой системе координат, повернутой относительно осей У - X —
— Z, проекция единичного вектора ОВ на плоскость XOZ. (Ч. имеет
следующие координаты:
o"S/XOZ^c:(.x_X)=CKw;o;z111);
^x«' = v z'"=v
Единичный вектор К *= (О; О; 1) в новой системе координат, согласно зависимости (2.62), выражается следующим образом:
Кб ХУ1^ ta_x_Z)= (0;siH6; cos<s).
Угол Ч^и-х-г) определим как угол между ОВ/ХОХ<_/,)_х_^) и К:
cos6 [costf cos t«p-i>l-tgAsi,n6],
^tS-X-Z.)^Y{»*n.(if-j») cosx + slnt [cose tqA. + si-nScos Cif ^p>Jl-*+ (cosScosCtp-pJ-tgA st»^]4
По аналогии с if.,„ x_ г), угол f(<(u_x-z) найдем как угол между проекцией вспомогательной режущей кромки на повернутую плоскость XOZ и вектором (- К), лежащим на отрицательном направлении
| и-KeXU |
| Us-x-z) |
| x-z) |
оси Z, т.е. угол между ОЛ/XOZ^ С!)_
cosgfcosficosd^tpi-tq Justus]
| Щи |
(2.73|
X на угол ь. Вектор jeX^Z = (О; 1; О) в новой системе координат (X У Z)^(х) имеет следующие координаты: 7е(ХУХ)1(х)= (0;cos<3' -itntf).
Вектор j е XVZ.,., лежащий на новой оси iL (х) > в старой системе координат х у Z определяется следующими углами: J eXVZnx) = (0;cos6; 5гн<э). Напишем уравнение плоскости, перпендикулярной к f: 9cos<5 + Zsine "Р-Проекцию единичного вектора 0 6 > лежащего на главной режущей кромке, на эту плоскость найдем как результат ее пересечения с плоскостью, проходящей через DB и j. Уравнение последней определим, решив определитель третьего порядка:
coslsinif; sitvA; eosAcasif
0; cos6; si-пб; «О,
X У Z
X (cos6cosip-tQAsin6)+ysvnGsittT-ZsiH<pcos(3 =0.
Составим уравнения линии пересечения двух плоскостей:
X(cos6cos<f-taAsin6)+ysiH6sin(p-ZsiHificos6 = 0, У cos<5 t Z Stн<у =0-
a,X +е,У+ c,Z=0, «,У +Cj,Z = 0.
Рассмотрим вывод ряда частных зависимостей. Для примера рассмотрим получение зависимостей для расчета углов (j>* /„. • %t (х) > fyty-X* ' fitfZ> '^tfX-г) и т,д* Подобные зависимости можно получить, принимая в формулах (2.72) и (2.73) значения углов <t, 6,а в соответствующих случаях равными нулю.
Однако с целью проверки уравнений (2.72) и (2.73) изберем другой путь. Используем для определения уравнений проекций режущих кромок на повернутую плоскость X О Z метод нахождения линий пересечения двух плоскостей: плоскости, перпендикулярной к повернутой оси У, и плоскости, проходящей через режущую кромку инструмента и повернутую ось У.
Рассмотрим вывод формул определения углов Vwy} и fiffxi '
Повернем систему координат по часовой стрелке относительно оси
+ c.
В итоге линия пересечения (Л П.) имеет следующие координаты:
ЛП^= fsvtup;-(cos6cos(f-tgisvH6)sin^■, (cosecosip-toA sinejeostf].
Искомый угол IB, расположен между осью Z и Л П.:
(cosiftos6-tg3,5in<5)cos6
tflitp =-==" 3 г- (2.74)
ux) ysiK'ip + Ccostfcosif -taAsineO1
Зависимость (2.74) совпадает с общей зависимостью (2.72) при J>= О и Т= О.
Найдем выражение для расчета угла Ч\<Ш- _»
Запишем уравнение плоскости, проходящей через 01 и j:
| cose; У |
j,= (0:, cosff ■, si-иб),
0!D = (cos^siHi^-sitvA.^ > -cbs^cosip.,)
C0SV'H<?,i -si»V> -cosA, cosq»,
| 0, |
| 0; X |
SiK<3
Z
X(C08fj-ta,te€)-'St'^VvKiftt Zsin^sO. Определим координаты линии пересечения двух плоскостей: XCco's(f-tol,to<S)- ytjgsui^+Zstitcp^O, Усо5<5 + Zsin6*0. ЛПг= [»1н^/сиб; Ccos4.1-tgA1t^6)sin0;-(costp1-tgA.1tg6_b:ose]-jJronif.M найдем как угол между двумя прямыми ЛПги -Z или
ЛП^и - К«ХУХ
| cos». |
| (2.75) |
(О; О; -1): (cos if, -Чд А1 tt|6) CosV
Выведем формулы для расчета углов vft(z) и <^(г) • После поворота системы координат XYZ по часовой стрелке относительно оси Z вектор fe X V Z< (z) - (О; 1; О), лежащий на новой оси У, займет положение
}",* XVZ = (-Sih^cost; 0). Как и ранее, с помощью определителя третьего порядка находим уравнения плоскостей, проходящих через j, бХДц2)и режущие кромки:
" Xcost coscp + У slut cosif-Z (sin <р cost: + sint tol) = 0;
Xcosip t ytQ*cosif, + Z(Hft^-to<ttoV=0. Плоскость, перпендикулярная к JA-XSitVC * ycOSX = 0), с перъой из плоскостей образует линию пересечения с координатами
Ml,?-- [cost(.Svuu>cos<t + taXsi-Wb)-, sinl (svnifcost +toAsvti/B)-,cos(pj-Координатами второй линии пересечения являются
лпг= [cos-c csuift- to«e toj 4-,); + 9ini;csiu^-t^<ci^0;-MS4l,/oos't^
Для определения углов между осью Z и ЛП,, ЛГЦ и отрицательным направлением оси Z получаем следующие зависимости:
"St ■ (2.76)
COS
^tosJip + (slntpcosfc + tflXivwt)4
| COS Ц? |
COS(fl (2.77)
1^(z) ^ COS2^ +•(*<•* If, cost -sittt t^i,1)4
Применяя подобную методику для угловш. и ш., найдем сле-
дующие зависимости: ' '
соэб [co s6co8C^-p)-tj[Xivttg ] (2 78)
*W"*' ^sih.sL(?-ja)+[cos(3iC05Ctf-i>)-t^sins']2 '
cosfl [costf cos CtyjO- tg^stng 3, ■.
COS 1С..C- j v i- fl i g
2.6. МЕТОДИКА АНАЛИТИЧЕСКОГО ИССЛЕДОВАНИЯ ГЕОМЕТРИИ РАБОЧЕЙ ЧАСТИ РЕЖУЩИХ ИНСТРУМЕНТОВ» НАХОДЯЩИХСЯ В ПРОЦЕССЕ РЕЗАНИЯ
2.6.1. Схема образования кинематической системы координат
Образование кинематической системы координат Хш Уи, Z.k., опре-
■ „ > WWW
деляющей положение режущего инструмента в Процессе резания и служащей для огсчега кинематических угловых характеристик инструмента, можно осуществить как непосредственным построением ее на основе вектора скорости результирующего движения резания, так и методом поворота статической системы координат инструмента XVY„ZV до совмещения одной из ее осей с вектором скорости результирующего движения резания. Второй метод построения кинематической системы координат XwywZw значительно упрощает методику аналитического исследования геометрии режущих инструментов в состоянии процесса резания, гак как при этом могут быть использованы формулы поворота систем координат.
В системе координат XWYWZ вектор скорости результирующего движения резания, так. же как и вектор скорости главного движения в системе координат X \Z.V совпадает с одной из осей системы. Для определения схемы поворота системы координат ПН до совмещения одной из ее осей с вектором скорости результирующего движения резания W необходимо прежде всего определить его положение ш системе Xv^vZ.y.
Рассмотрим пример токарной обработки деталей резцом (рис.2.17).
В принятом случае вектор скорости резания W равен сумме векторов скоростей главного движения V и подачи V<:
,-Ц----- —4, _ 'wr="V + v's,
где 1^(*Y|?(4]VS|, JV(- 51 Им, мм/мин, f.^J:*-S',H мм/мин. На-

Рис. 2.17. Схема токарной обработки проходным резцом
правление вектора скорости главного движения V зависит от расположения точек режущей кромки инструмента относительно обработанной поверхности детали. При точении формообразующая точка режущей кромки инструмента может располагаться выше или ниже линии центров токарного станка. В зависимости от этого вектор скорости главного движения для различных точек режущей кромки инструмента отклоняется в ту или иную сторону.
Величину угла отклонения вектора скорости главного движения определим по зависимости
siHu) = ih/H, где £ \\ - смещение точки приложения вектора относительно линии центров станка, (+) - выше, (-) - ниже линии центров; В - расстояние между начальной точкой вектора V и осью детали.
Образующийся угол у. между вектором скорости резания W и вектором V определяется по зависимости
Ьш- ^ - 5* - S,
где s —подача, мм/об; Б - диаметр вала, мм; и. — частота вращения вала, об/мин.
Таким образом, в общем случае положение вектора скорости резания в системе координат ХуУДу может определяться рядом направляющих углов. Для рассмотренного случая такими углами являются углы из и ц. При известчых значениях этих углов для перевода системы координат XХ1у в положение Xw*vv^W необходимо исходную систему координат сместить в положение X1 Уу Ъ\ и повернуть ее
относительно оси Z' на угол ш и относительно оси X' на угол р.
2.6.2. Методика определения координат режущих кромок.уравнений режущих поверхностей и величин углов в кинематической сие теме координат
Методика определения координат режущих кромок, уравнений рабочих поверхностей ^ секущих плоскостей и кинематических углов в системе координат " w^w ^ w заключается в следующем.
1. Определяют координаты режущих кромок и др_угих_элементов рабочей части инструментов в системе координат X Уу Zy.
2. Осуществляют поворот системы Xy^/vZv до совмещения вектора скорости резания с одной из осей.
3. Определяют координаты рабочих элементов в новой системе координат X ywZw с помощью матриц поворота.
4. Находят значения рабочих (кинематических) углов.
При э том определение углов, характеризующих положение режущих кромок в пространстве (рабочих углов А-, JL,., ф„, (fj), сводится к определению углов между отрезками прямых или между прямой и плоскостью. Для определения же рабочих углов, характеризующих положение в пространстве рабочих поверхностей режущего клина инструмента (рабочих углов J»,dp, у. ««'ip)' наиболее удобно использовать метод определения углов между линиями пересечения двух плоскостей третьей плоскостью. Так, рабочие передние углы г_ и У. находят между линиями пересечения двух пар плоскостей:
1J секущей плоскости и передней поверхности;
2) базовой плоскости, перпендикулярной к вектору W, и секущей плоскости.
Рабочий главный задний угол at. определяется пересечение!* двух прямых, каждая из которых образуется пересечением двух плоскостей:
1) секущей плоскости и главной задней поверхности;
2) плоскости резания и секущей плоскости. Рабочий вспомогательный задний угол Ы. находится между линиями
пересечения:
1) секущей плоскости и вспомогательной задней поверхности;
2) плоскости, Проходящей через вспомогательную режущую кромку и вектор W, и секущей плоскости.
Разберем кратко алгоритмы расчета этих углов, которые без затруднений реализуются с помощью ЭВМ.
Передние углы рассчитываются в следующей последовательности: 1. Определяют координаты единичных векторов, лежащих на передней поверхности, и вектора W в системе координат Xv 5L Z.y.
2. Составляют уравнения передней поверхности и плоскости, перпендикулярной к W. в системе координат Xу Xv Z v.
3. Находят положение секущей плоскости (например, плоскости, перпендикулярной к проекции главной режущей кромки на плоскость, перпендикулярную к W).
4. Определяют координаты линии пересечения секущей плоскости и передней поверхности,
5. Получают координаты линии пересечения секущей плоскости и плоскости, перпендикулярной к W.
6» Рассчитывают угол между линиями пересечения. Для определения задних углов расчет производится следующим образом:
1. Определяют координаты единичных векторов, лежащих на задних поверхностях, и вектора W в системе координат Ху Уу Iv.
2. Составляют уравнения задних поверхностей и плоскостей, проходящих через вектор W и режущие кромки.
3. Находят положение секущей плоскости.
4. Определяют линии пересечения секущей плоскости с соответствующей рабочей поверхностью и секущей плоскости с одной из базовых плоскостей. Рассчитывают величину углов между линиями пересечения.
2.7. ЭЛЕМЕНТЫ АНАЛИТИЧЕСКОЙ ГЕОМЕТРИИ ФАСОННЫХ ПОВЕРХНОСТЕЙ РАБОЧЕЙ ЧАСТИ РЕЖУЩИХ ИНСТРУМЕНТОВ
2.7.1. Определение п о л ожения прямых, касательных к кривым и поверхностям
Рассмотрим вывод уравнений для описания прямых, касательных к пространственной кривой, заданной зависимостью | (X; У; 1) = О, где Х_ = ip(t); у м V (t); % «я ш Ct). Подобными параметрическими уравнениями задается в пространстве положение винтовой* линии.
Предположим, что точка М0(Хо, У0, Z0) этой кривой (рис. 2.18) соответствует значению t, а точка Q(X-t-дХ; У + дУ;2+д£)- значению
t + Д t. Тогда уравнения прямой, М0 Q в канонической форме име ют следующий вид:
X ~ X 0 _ У - У о _ X - X о _
дХ д У „" д Z
При делении на дt получим:
Х " Х_°_ Jj " Ц° - Z ~ Zo дХ/Д-t " ДУ /At ~ AZ/At
Переходя в этих уравнениях к пределу At —*- О, получим уравнения касательной к кривой в точке М0СХо1У0Х0):
| о _ |
Z-Zi
dX/dtL' oLy/at|Mo~ dZ/dtJ^
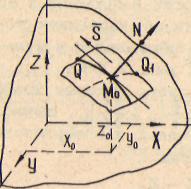
Рис. 2.18, Схема расположения векторов, касательных и нормальных к поверхности
При э том направляющий вектор 3", параллельный касательной, будет иметь следующие координаты:
И
| (2.80) |
| ' dt |
м0' dt |м/'
| it dt |
| (Х-Х0)+^- |
| U-Zo)=0. (2.81) |
Уравнение плоскости, проходящей через точку М0(Х0УоХо) и перпендикулярной к касательной, запишется в следующем виде:
М„
Для случая, когда кривая линия^задана уравнением j(X,if) =0 при 9=ip(X), уравнения вектора S, параллельного касательной, в канонической фо рме имеют вид:
| х-х, dX |
| (2.82) |
.=ii;y-yo=cty/dx|MU-K0).
Величину cdif/dX найдем по зависимости о1У /dLX =—J)
Тогда уравнение касательной к кривой |(Х,У) «■ О в точке "°М.(Х УЛ можно записать так:
Определим направляющие косинусы вектора S-(cBSdjcoipjcos-c);
»-»•■-ifjfjV'-w l2'e3)
Уравнение нормали к этой кривой в точке МеС*в,У0) имеет вид:
Ш§!1 (X-XJ. (2.84)
В e 3f /ЭХ |м.
Выведем уравнения касательной плоскости и нормали к поверхности ^(.Х,Ч,Х} — О. Возьмем на поверхности обыкновенную точку Mp^X^S.jZ,), в которой pfx i ду ' 8Z не 0бРа1нается в НУЛЬ одновременно, и какую-нибудь линию MpQ (см. рис. 2.18).
Прямая M,N, имеющая в качестве своих угловых коэффициентов значения частных производных 5LL_ J it-L. г grL» вычисленные для точки Мв(Хв,УаД0) • называется нормалью к поверхности ^(X,y,Z)* •О в данной точке. Ее уравнения имеют вид:
| C05J3 |
,,,; cosoi = -7= .... —1; гшт-г
2.7.2. Пример расчета передних углов цилиндрической фрезы с винтовыми зубьями
Напишем уравнение прямой А В, образующей геликоидальную поверхность передней грани цилиндрической фрезы с винтовыми зубьями (рис. 2.19). Крайними ее точками являются точки Айв: А(0; R; 0); B(R5vnycosy; Rsiti^jO). Запишем уравнения прямой в канонической форме:
х-х4 _ ц-ы< _ 2- Z,X - 0 _____________ Я - Я
| (2.89) |
Xcosr+• У«*пу - fts»«v =0.
| *. |
| (2.85) |
| , нормального к поверхности (2.86) |
Ц1Щ^ *№\л, *№%

