




 Задача 23. 1. Человек, стоя на коньках на льду, бросает камень горизонтально со скоростью v относительно земли. Масса человека – M, масса камня – m. Какую работу AЧ совершает человек?
Задача 23. 1. Человек, стоя на коньках на льду, бросает камень горизонтально со скоростью v относительно земли. Масса человека – M, масса камня – m. Какую работу AЧ совершает человек?
Работу каких сил и над какими телами нужно найти? Очевидно, имеется в виду работа, совершаемая мышцами человека. Мышечные усилия приводят в движение не только камень, но и самого человека.
Какие законы следует применить? Искомую работу поможет найти закон изменения механической энергии (20.15). Рассмотрим систему «человек, камень» и запишем соотношение (20.15) для двух состояний:1) – до броска, 2) – после него. Получим
m v2 / 2 + M u2 / 2 – 0 = AЧ. (23.1)
Механическая энергия рассматриваемой системы совпадает с ее кинетической энергией. Скорость человека после броска – u. Работа внешних сил – силы тяжести и силы нормальной реакции – равна нулю, так как тела перемещаются перпендикулярно этим силам. Работа внутренних непотенциальных сил AН представляет собой искомую работу человека AЧ.
Одного уравнения (23.1) оказывается недостаточно для решения задачи, поскольку оно содержит две неизвестные величины: AЧ и u. Приходится применить еще и закон изменения импульса (20.2). Запишем его в проекциях на горизонтальную ось для тех же состояний той же системы.:
m v – M u = 0. (23.2)
Из (23.2) и (23.1) найдем
AЧ = m v2 (1 + m /M) / 2.
Видно, что работа человека больше энергии, сообщенной камню. Лишь при m << M различием этих величин можно пренебречь.
 В копилку опыта
В копилку опыта
· Законы изменения энергии и импульса часто применяются совместно.
· Работа внутренних непотенциальных сил может быть положительной.
Задача 23. 2. Шар массой m1, катящийся со скоростью v по горизонтальной поверхности, упруго сталкивается с неподвижным шаром массой m2. Каковы скорости обоих шаров после удара? Шары однородны, их размеры одинаковы.

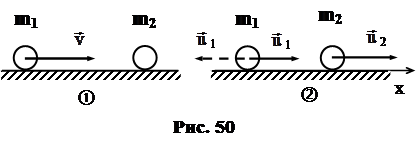 На рисунке 50 слева показаны шары до столкновения, а справа – после него. Скорость
На рисунке 50 слева показаны шары до столкновения, а справа – после него. Скорость  1 первого шара после столкновения может быть направлена так, как показано сплошной стрелкой на рис. 50 или в противоположную сторону – пунктирная стрелка.
1 первого шара после столкновения может быть направлена так, как показано сплошной стрелкой на рис. 50 или в противоположную сторону – пунктирная стрелка.
Поскольку нужно найти две величины u1 и u2, ясно, что одним законом изменения не обойдешься.
Применим закон изменения импульса в проекциях на ось x (рис. 50) для сталкивающихся шаров:
m1 u1X + m2 u2 – m1 v = 0. (23.3)
В уравнении (23.3) использована проекция u1X скорости 1, чтобы «убить двух зайцев сразу». По знаку найденной величины u1X можно будет судить о том, в какую сторону на самом деле направлен вектор 1.
Применим закон изменения механической энергии:
m1 u1X2 / 2 + m2 u22 / 2 – m1 v2/ 2 = A + AН. (23.4)
Работа внешних сил A (сил тяжести и реакции поверхности) равна нулю, так как указанные силы перпендикулярны перемещениям. Работа внутренних непотенциальных сил AН также равна нулю, потому что удар предполагается абсолютно упругим.
Полученную систему уравнений (23.3) и (23.4) удобно решать следующим образом:
 |
u2 =
 ; u1X =
; u1X =  . (23.5)
. (23.5)
Видим, что u1X > 0 (скорость 1 направлена вдоль оси x), если m1 > m2. Пунктирная на рисунке 50 стрелка соответствует случаю m1 < m2. Если m1 = m2, то u1X = 0, а u2 = v – одинаковые шары при абсолютно упругих столкновениях обмениваются своими импульсами. В случае m1 << m2 скорость u2 << v, а u1X» – v; это означает, что легенький шар отскакивает, «как от стенки горох».
Задача 23. 3. Биллиардный шар с энергией E0 абсолютно упруго сталкивается с таким же неподвижным шаром и отклоняется от первоначального направления на угол, равный 600. Определить направление движения второго шара, а также энергии шаров после столкновения.
 Почему, в отличие от предыдущей задачи, шары не остаются на одной прямой? Потому, что происходит не центральный удар: скорость сближения шаров не направлена вдоль прямой, соединяющей их центры. Именно на прямой, соединяющей центры, лежит (в отсутствии трения) сила взаимодействия
Почему, в отличие от предыдущей задачи, шары не остаются на одной прямой? Потому, что происходит не центральный удар: скорость сближения шаров не направлена вдоль прямой, соединяющей их центры. Именно на прямой, соединяющей центры, лежит (в отсутствии трения) сила взаимодействия  , которая отклоняет шар, двигавшейся со скоростью
, которая отклоняет шар, двигавшейся со скоростью  , на угол a (рис. 51). Обусловленная третьим законом Ньютона сила – сообщает второму шару скорость 2, направленную под углом b к скорости .
, на угол a (рис. 51). Обусловленная третьим законом Ньютона сила – сообщает второму шару скорость 2, направленную под углом b к скорости .
Какие законы следует применить? Пример предыдущей задачи подсказывает, что следует применить законы изменения энергии и импульса.
Рассматриваем систему двух шаров, массы которых равны m. Сопоставляем состояния и ‚: до столкновения и после него (рис. 51).
Закон изменения импульса (20.2) приводит к соотношению
 |
m
1 + m 2 – m = 0. (23.6)
Правая часть уравнения (23.6) равна нулю, так как силы тяжести биллиардных шаров уравновешиваются силами реакции опоры.
Закон изменения механической энергии (20.15) дает
m v12 / 2 + m v22 / 2 – m v2/ 2 = 0. (23.7)
Работа A внешних сил (тяжести и реакции опоры) равна нулю, поскольку эти силы перпендикулярны направлению, в котором перемещаются их точки приложения. Работа AН внутренних непотенциальных сил равна нулю для абсолютно упругого столкновения: именно таков, по определению, смысл указанного понятия.
Достаточно ли этих уравнений для решения задачи? Входят ли в них искомые величины? Как эти величины связаны с неизвестными полученных уравнений? Энергии шаров определяются модулями их скоростей:
E0 = m v2/ 2; E1 = m v12 / 2; E2 = m v22 / 2. (23.8)
Для указания направления вектора 2 нужно найти угол b (рис. 51). Как это сделать? Можно записать уравнение (23.6) в проекциях на оси x и y (рис. 51). Тогда получится система трех уравнений, их которой можно найти неизвестные v1, v2 и b. Воспользуемся иным – геометрическим методом решения. Для этого представим соотношение (23.6) векторным треугольником, изображенным на рисунке 51. Уравнение (23.7) перепишем так:
(m v2) = (m v12) + (m v22). (23.9)
Соотношение (23.9) для векторного треугольника, изображенного на рисунке 51, означает, что этот треугольник является прямоугольным, так как длины его сторон связаны теоремой Пифагора.
Из указанного прямоугольного треугольника сразу получим искомый угол b:
b = 900 – 600 = 300.
Соотношения сторон в таком треугольнике позволяют записать
v1 = v / 2, v2 = v  / 2. (23.10)
/ 2. (23.10)
Подставляя (23.10) в (23.8), найдем остальные ответы:
E1 = E0 / 4, E2 = 3 E0 / 4.
 В копилку опыта
В копилку опыта
· Задачи о столкновении требуют применения законов изменения механической энергии и импульса.
· Геометрический метод – анализ элементов векторных треугольников – иногда более удобен по сравнению со стандартным методом нахождения проекций векторов.
 Задача 23. 4. Найти количество теплоты, которое выделилось при абсолютно неупругом центральном ударе двух шаров, двигавшихся навстречу друг другу. Массы шаров равны m1 и m2, а их скорости, соответственно, v1 и v2.
Задача 23. 4. Найти количество теплоты, которое выделилось при абсолютно неупругом центральном ударе двух шаров, двигавшихся навстречу друг другу. Массы шаров равны m1 и m2, а их скорости, соответственно, v1 и v2.
Каков механизм выделения теплоты? Встречалась ли аналогичная ситуация в других задачах? В задаче 22. 7 тоже речь шла о выделении тепла. Количество выделившейся теплоты приравнивалось взятой с обратным знаком работе сил трения. В данном случае шары при столкновении деформируются, их форма и размеры не восстанавливаются, шары движутся далее как одно целое. Именно такую ситуацию имеют в виду, когда говорят об абсолютно неупругом столкновении. При деформации части тел трутся друг о друга. Работа этих сил трения, как и в задаче 22. 7, равна по модулю количеству выделившейся теплоты:
Q = – AТ. (23.11)
Какой закон следует использовать для нахождения AТ? Нужно использовать закон изменения механической энергии (20.15). Запишем его для состояний и ‚ системы двух шаров (рис.52):
(m1 + m2) v2/ 2 – (m1 v12 / 2 + m2 v22 / 2) = AТ. (23.12)
Потенциальной энергии рассматриваемая система не имеет – нет внутренних потенциальных сил. Работа внешних сил (тяжести и реакции опоры) равна нулю. Работа AН внутренних непотенциальных сил – это работа сил трения при столкновении AТ.
Достаточно полученных уравнений для решения задачи? Нет, в двух уравнениях три неизвестных: Q, AТ, и v. Поэтому нужно использовать еще закон изменения импульса (20.2) в проекциях на ось x (рис. 52). Чаще всего проекции выражаются через модули векторов. В данном случае направление скорости может быть таким, как показано на рисунке 52 сплошной или пунктирной стрелками. Иных направлений при лобовом столкновении быть не может. Из-за указанной неопределенности целесообразно использовать в уравнении переменную vX для обозначения проекции вектора . Получим
(m1 + m2) vX – (m1 v1 – m2 v2) = 0. (23.13)
Из (23.13) найдем
vX = (m1 v1 – m2 v2) / (m1 + m2). (23.14)
Выражение (23.14) снимает неопределенность в направлении скорости : скорость направлена в ту же сторону, что и наибольший по модулю импульс сталкивающихся шаров.
Теперь осталось учесть, что v2 = vX2, и подставить (23.14), а также (23.11) в (23.12). Получим
Q =  .
.
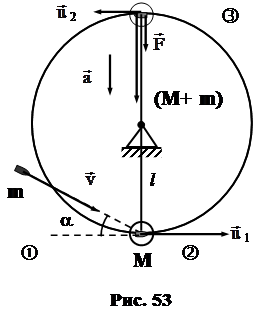 Задача 23. 5*. Шарик массой M висит на нити длиной l и может двигаться по окружности в вертикальной плоскости. В него попадает и застревает пуля массой m, летевшая вниз под углом a к горизонту. Какой минимальной скоростью должна обладать пуля, чтобы в результате ее попадания шарик мог сделать полный оборот в вертикальной плоскости? Какое количество теплоты при этом выделится?
Задача 23. 5*. Шарик массой M висит на нити длиной l и может двигаться по окружности в вертикальной плоскости. В него попадает и застревает пуля массой m, летевшая вниз под углом a к горизонту. Какой минимальной скоростью должна обладать пуля, чтобы в результате ее попадания шарик мог сделать полный оборот в вертикальной плоскости? Какое количество теплоты при этом выделится?
Из А нализа содержания задачи следует, что для ее решения придется применить законы изменения, но не только их. Поэтому нужно вначале спланировать последовательность использования тех или иных соотношений.
В результате попадания пули шарик приобретает некоторую скорость 1 и начинает двигаться по окружности радиуса l (рис. 53). Он может достичь верхней точки, обладая скоростью 2. Соответствующее этой скорости центростремительное ускорение  должно обеспечиваться силой натяжения нити и силой тяжести (M + m)
должно обеспечиваться силой натяжения нити и силой тяжести (M + m)  . В предельном случае, о котором говорится в задаче, сила обращается в нуль. Для установления связи между перечисленными величинами, а также для нахождения количества теплоты Q, выделившегося при попадании пули, нужно использовать и закон изменения импульса, и
. В предельном случае, о котором говорится в задаче, сила обращается в нуль. Для установления связи между перечисленными величинами, а также для нахождения количества теплоты Q, выделившегося при попадании пули, нужно использовать и закон изменения импульса, и  закон изменения энергии, и законы динамики, и кинематические соотношения. Возникает довольно громоздкий план решения. Его можно сделать четким и наглядным, представив в виде так называемой граф-схемы, изображенной на рисунке (54).
закон изменения энергии, и законы динамики, и кинематические соотношения. Возникает довольно громоздкий план решения. Его можно сделать четким и наглядным, представив в виде так называемой граф-схемы, изображенной на рисунке (54).
Стрелки граф-схемы, отражают очередность определения неизвестных, начиная от заданных в условии величин (в прямоугольных рамках) до искомых (в двойных кружках). На граф-схеме указаны также аббревиатуры законов или соотношения, которые нужно использовать на соответствующем этапе решения.
Начнем с последних звеньев граф-схемы. Запишем уравнение второго закона Ньютона для шарика с застрявшей пулей в верхней точке траектории, имея в виду предельный случай, когда F = 0:
(M + m) a = (M +m) g. (23.15)
Далее определяем u2 посредством кинематического соотношения, указанного на граф-схеме:
a = u22 / l. (23.16)
Следующий этап – применение закона изменения энергии (ЗИЭ) (20.15) для состояний ‚ и ƒ (рис. 53), чтобы выразить u1 через u2. Рассматриваем систему «шарик с пулей и Земля». Получим уравнение
(M + m) g 2 l + (M + m) u22 / 2 – (M + m) u12 / 2 = 0. (23.17)
Потенциальная энергия принята равной нулю в состоянии ‚. Внутренних не потенциальных сил нет. Поэтому AН = 0. Сила натяжения нити – внешняя для рассматриваемой системы. Ее работа равна нулю, так как эта сила перпендикулярна элементарным перемещениям точки приложения.
Последний шаг к искомой величине v требует применения закона изменения импульса (ЗИИ) (20.2). Система – «шарик и пуля». Первое состояние – до столкновения, второе – непосредственно после него. Уравнение проецируем на горизонтальную ось.
(M + m) u1 – m v cos a = 0. (23.18)
Теплота Q выделяется за счет работы сил трения при не упругом ударе пули. Для нахождения Q следует применить закон изменения энергии (ЗИЭ) (20.15):
(M + m) u12 / 2 – m v2 / 2 = AН, где AН = – Q. (23.19)
Осталось из полученной системы уравнений выразить искомые величины (проделайте самостоятельно). Они равны:
v =  , Q =
, Q =  .
.
В копилку опыта
· При неупругом столкновении тел количество выделившейся теплоты равно уменьшению их механической энергии.
· Если план решения задачи оказывается громоздким, то его целесообразно представить в виде граф-схемы.
Механические колебания
«Термин «колебания» относится не только к механике. Колебаниями называют такие процессы, при которых значения изменяющихся величин повторяются, хотя бы приблизительно, через некоторые промежутки времени. Происходят колебания температуры воздуха, атмосферного давления, электрического тока.
Если значения колеблющихся величин точно повторяются через равные промежутки времени, то колебания называют периодическими, а указанный промежуток времени – периодом. Не все колебания являются периодическими.
«Под механическими колебаниями понимают колебания величин, характеризующих механическое движение: координат точек, проекций скоростей и т. п. Иногда механическими колебаниями называют колебательные движения, то есть такие движения, при которых частицы последовательно проходят одни и те же положения, двигаясь то в одном, то в противоположном направлениях.
«Колебания величины x называют гармоническими, если она изменяется по закону
x = x0 sin (w t + j0) (24.1)
В формуле (24.1) x0 – амплитуда колебания, w – циклическая частота, j0 – начальная фаза колебания.
Период гармонического колебания T = 2 p / w. Величину n = 1 / T =,
w / (2 p), называют частотой колебания.
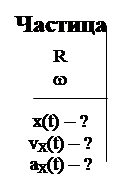
Задача 24. 1. Частица равномерно движется по окружности радиуса R с угловой скоростью w. Как изменяется с течением времени ее декартова координата x, отсчитываемая от центра окружности? Как изменяются проекции на эту ось скорости и ускорения?
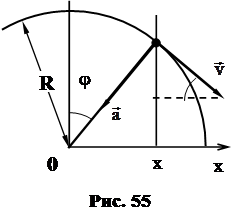
 На рисунке 55 изображена траектория движения частицы, а также показаны ее скорость и ускорение . Какие «генерал-законы» нужно здесь применить? Речь в задаче идет только о кинематических величинах. Поэтому естественно опираться на кинематические соотношения (3.9) – (3.11). Непосредственно из рисунка 55 следует, что
На рисунке 55 изображена траектория движения частицы, а также показаны ее скорость и ускорение . Какие «генерал-законы» нужно здесь применить? Речь в задаче идет только о кинематических величинах. Поэтому естественно опираться на кинематические соотношения (3.9) – (3.11). Непосредственно из рисунка 55 следует, что
x = R sin j . (24.2)
Угол j при равномерном движении частицы изменяется со временем по линейному закону:
j = j0 + w t, (24.3)
что следует из (3.11). Величина j0 – значение угла j при t = 0.
Из (24.3) и (24.2) получаем
x = R sin (w t + j0), (24.4)
то есть координата x совершает гармонические колебания.
Проецируя скорость на ось x (рис. 55) и учитывая (3.6), найдем
vX = R w cos (w t + j0). (24.5)
Те, кто умеет дифференцировать, могут получить эту формулу, найдя производную функции (24.4).
Модуль ускорения (рис. 55), как центростремительного ускорения, определяется формулой (3.10). Поэтому проекция на ось x (рис. 55) оказывается равной
aX = – R w2 sin (w t + j0). (24.6)
Функция (24.6), естественно, представляет собой производную от (24.5).
Учитывая (24.4), соотношение (24.6) можно записать иначе:
aX = – w2 x. (24.7)
Величины vX и aX, подобно x, также совершают гармонические колебания.
Поскольку уравнения, определяющие ускорения, находят обычно в динамике, соотношение (24.7) называют динамическим уравнение гармонических колебаний, в отличие от (24.1), именуемого кинематическим уравнением гармонических колебаний.
В копилку опыта
· Гармонические колебания произвольной величины x описываются кинематическим уравнением (24.1) и эквивалентным ему динамическим уравнением (24.7).
· Гармонические колебания произвольной величины x можно моделировать равномерным движением точки по окружности. Радиус окружности представляет амплитуду колебания, угловая скорость w движения точки – циклическую частоту, а угол поворота j отрезка прямой, соединяющего движущуюся точку с центром окружности – фазу колебания.
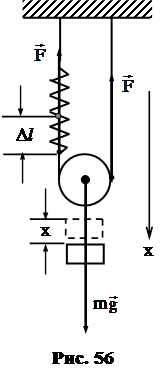
 Задача 24. 2. К оси идеального блока жестко прикреплен груз массой m. Блок подвешен на нерастяжимой нити, один конец которой непосредственно соединен с потолком, а другой – через невесомую пружину жесткостью k. Груз совершает малые незатухающие колебания вдоль вертикали. Найти период этих колебаний.
Задача 24. 2. К оси идеального блока жестко прикреплен груз массой m. Блок подвешен на нерастяжимой нити, один конец которой непосредственно соединен с потолком, а другой – через невесомую пружину жесткостью k. Груз совершает малые незатухающие колебания вдоль вертикали. Найти период этих колебаний.
Период колебания T связан с циклической частотой w соотношением T = 2 p / w, а циклическая частота фигурирует в динамическом уравнении гармонических колебаний (24.7). Так что нужно получить динамическое уравнение, для чего следует к грузу применить второй закон Ньютона в проекции на ось x (рис 56):
m aX = m g – 2 F. (24.8)
Модуль силы натяжения нити F один и тот же в любых ее точках, так как нить невесома, а блок идеальный. В соответствии с третьим законом Ньютона, такова же по модулю и сила упругости пружины:
F = k D l, (24.9)
где D l – растяжение пружины, соответствующее опусканию груза на величину x относительно положения, при котором пружина не деформирована.
 Как связаны величины x и D l? С этой проблемой приходилось сталкиваться и в задаче 17.2. Чтобы опустить блок на величину x, конец нити нужно переместить на 2 x, то есть
Как связаны величины x и D l? С этой проблемой приходилось сталкиваться и в задаче 17.2. Чтобы опустить блок на величину x, конец нити нужно переместить на 2 x, то есть
D l = 2 x. (24.10)
Подставляя (24.9) и (24.10) в (24.8), получим
aX = – 4 (k / m) x + g. (24.11)
Нельзя ли привести (24.11) к виду (24.7)? Что, если изменить начало отсчета координаты x? Изменится ли при этом проекция ускорения aX? Нет, она не зависит от начала отсчета координаты x. Поэтому преобразовывать следует лишь правую часть (24.11):
aX = – 4 (k / m) (x – m g / (4 k)) Þ
aX = – w2 x¢, (24.12)
где w2 = 4 k / m, (24.13)
и x¢ = x – m g / (4 k). (24.14)
Получилось динамическое уравнение гармонического колебания координаты x¢. Эта координата равна нулю при x = x0 = m g / (4 k), то есть начало отсчета координаты x¢ смещено по сравнению с началом отсчета координаты x вниз на величину x0. При x = x0 вместе с координатой x¢ в нуль обращается и aX. Следовательно, начало отсчета координаты x¢, совершающей гармонические колебания, совпадает с положением равновесия груза.
Искомый период колебаний находится из (24.13):
T = 2 p / w = p  .
.
Задача 24. 3. К потолку вагона, движущегося с ускорением 0, на нити длиной l подвешен шарик. Каков период колебания шарика, и куда направлена нить при отсутствии колебаний?
 Решим вначале задачу для простейшего случая 0 = 0, то есть, предполагая, что поезд движется относительно Земли с постоянной скоростью.
Решим вначале задачу для простейшего случая 0 = 0, то есть, предполагая, что поезд движется относительно Земли с постоянной скоростью.
Вагон в этом случае можно считать инерциальной системой отсчета и записать для него уравнение второго закона Ньютона:
m = m + . (24.15)
Здесь = ШВ – ускорение шарика относительно вагона, а – сила натяжения нити (рис. 57).
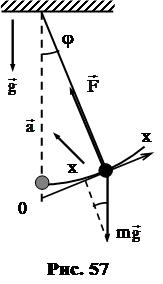 В состоянии равновесия = 0, и из (24.15) видно, что силы и m должны лежать на одной прямой. Так что нить в отсутствии колебаний расположена вертикально, то есть параллельно вектору (пунктирная линия на рис. 57).
В состоянии равновесия = 0, и из (24.15) видно, что силы и m должны лежать на одной прямой. Так что нить в отсутствии колебаний расположена вертикально, то есть параллельно вектору (пунктирная линия на рис. 57).
При колебаниях появляется ускорение ¹ 0. Уравнение (24.15) удобно проецировать на ось x, перпендикулярную нити, чтобы проекция неизвестной силы натяжения оказалась равной нулю. Получается
m aX = – m g sin j.
Ограничиваясь малыми углами отклонения нити j, можно приблизительно положить sin j» j» x / l, где координата шарика мало отличается от длины дуги, соответствующей углу поворота j (рис. 57). Тогда динамическое уравнение шарика принимает вид
m aX = – m g x / l,
то есть совпадает с (24.7), если
w2 = g / l, или T = 2 p  . (24.16)
. (24.16)
Таким образом, приходим к заключению, что шарик совершает гармонические (при небольших амплитудах) колебания. Период колебаний может быть вычислен по формуле (24.16). Равновесное положение нити – вертикальное.
Теперь посмотрим, что изменится, если вагон будет двигаться с ускорением 0 ¹ 0.
Уравнение второго закона Ньютона придется записывать не относительно вагона, а относительно инерциальной системы отсчета «Земля». Вместо (24.15) будем иметь
m ШЗ = m + . (24.17)
Ускорение ШЗ шарика относительно Земли можно связать с ускорением шарика относительно вагона ШВ = , пользуясь законом сложения ускорений (3.5):
ШЗ = ШВ + ВЗ = + 0. (24.18)
Из (24.17) и (24.18) получим
m = m ( – 0) + . (24.19)
Сравнивая (24.19) с (24.15), видим, что все отличие сводится к замене величины на
¢ = – 0. (24.20)
Это означает, что движение вагона с ускорением 0 сказывается на колебаниях маятника точно так же, как изменение ускорения свободного падения с величины на величину ¢, определяемую формулой (24.20).
В положении равновесия нить будет располагаться параллельно вектору ¢. Это положение, в соответствии с (24.20) зависит от модуля и направления ускорения вагона 0.
Период колебания вычисляется по формуле (24.16) с заменой на ¢:
T = 2 p  .
.
В копилку опыта
· Нахождение периода гармонических колебаний сводится к составлению динамического уравнения и приведению его к виду (24.7).
· При решении некоторых задач полезно вначале упростить их, несколько видоизменив условие.
· Замена на ¢ = – 0 означает переход к другой задаче, которая эквивалентна данной, но решается проще – к задаче о колебаниях при 0 = 0. Рассмотрение иной задачи, эквивалентной данной, в ряде случаев представляет собой эффективный способ решения.
 Задача 24. 4. В системе, изображенной на рисунке 58, бруски массами m1 и m2 связаны нерастяжимой нитью, перекинутой через идеальный блок. Пружина жесткостью k в начальный момент не деформирована. Горизонтальная поверхность, по которой может скользить брусок, идеально гладкая. Определить период и амплитуду колебаний брусков, если их начальная скорость была равна нулю.
Задача 24. 4. В системе, изображенной на рисунке 58, бруски массами m1 и m2 связаны нерастяжимой нитью, перекинутой через идеальный блок. Пружина жесткостью k в начальный момент не деформирована. Горизонтальная поверхность, по которой может скользить брусок, идеально гладкая. Определить период и амплитуду колебаний брусков, если их начальная скорость была равна нулю.
Для нахождения периода колебаний нужно получить динамическое уравнение и привести его к виду (24.7). С этой целью запишем второй закон Ньютона для бруска массой m1 в проекциях на ось x и для бруска массой m2 в проекциях на ось y (рис.58):
m1 a1 = F1 – k x, (24.21)
m2 a2 = m2 g – F2, (24.22)
где 1 и 2 – силы натяжения нити, приложенные к брускам, а x – удлинение пружины при движении брусков (рис. 58).
Нерастяжимость нити и идеальность блока позволяют принять
 |
a1 = a2 = aX и F1 = F2 = F.
С этими условиями уравнения (24.21) и (24.22) дают
(m1 + m2) aX = m2 g – k x.
Отсюда aX = –  .
.
Последнее равенство совпадает с динамическим уравнением гармонических колебаний (24.7) при w2 = k / (m1 + m2), что позволяет найти период колебаний:
T =  = 2 p
= 2 p  .
.
Гармонические колебания совершает координата
x¢ = x – x0, где x0 = m2 g / k. (24.23)
x0 – деформация пружины в положении равновесия, когда aX = 0.
Для определения амплитуды колебаний, то есть наибольшего отклонения от положения равновесия, применим закон изменения механической энергии (20.15) к системе «бруски, пружина, Земля».
Сопоставляем исходное состояние и конечное ‚, соответствующее наибольшему удлинению пружины xК. Состояние будем считать нулевым (EП1 = 0). Кинетическая энергия в этом состоянии также равна нулю (EК1 = 0).
Поэтому E1 = EК1 + EП1 = 0.
В состоянии ‚ кинетическая энергия равна нулю, а потенциальная складываемся из работ сил упругости и тяжести при переходе в нулевое состояние :
E2 = k xК2 / 2 – m2 g xК.
Правая часть уравнения (20.15) равна нулю: внутренних непотенциальных сил нет, а сила реакции горизонтальной поверхности перпендикулярна перемещению скользящего по ней бруска. Получаем E2 – E1 = 0,
или k xК2 / 2 – m2 g xК = 0.
Следовательно, xК = 2 m2 g / k. (24.24)
Сравнивая (24.24) с (24.23), видим, что наибольшее удлинение пружины вдвое превышает удлинение ее в положении равновесия. Иными словами, бруски смещаются от положения равновесия на величину x0 как в одну, так и в другую стороны. Это максимальное их смещение и есть амплитуда колебаний, то есть xМ = x0 = m2 g / k.
В копилку опыта
· Динамическое уравнение гармонических колебаний определяет частоту (период) и переменную, которая изменяется по закону синуса (косинуса).
· При нахождении амплитуды колебаний часто приходится применять закон изменения механической энергии.

