Все электродвигатели обладают свойством саморегулирования (подробно свойство саморегулирования будет рассмотрено далее) и развивать момент равный моменту сопротивления механизма [гер 444].
Любой производственный механизм после включения электрод в игателя, через некоторое время, входит в установившийся режим при этом скорость двигателя устанавливается постоянной.
Установившемуся режиму соответствует равновесие статического момента сопротивления механизм –  и электромагнитного момента д в игателя –
и электромагнитного момента д в игателя –  при определённой скорости, т.е.
при определённой скорости, т.е.

После достижения равновесия между моментами в электроприводе устанавливается постоянная или установившаяся скорость движения.
Значение установившейся скорости легко определить графически, если механическую характеристику  механизма (например вентилятора – кривая 1 (рис 4.2) построить в осях
механизма (например вентилятора – кривая 1 (рис 4.2) построить в осях  , вместо
, вместо  (на графике
(на графике  (
( ) в одном масштабе (рис. 4.4).
) в одном масштабе (рис. 4.4). 
На рисунке 4.4 приведены механические характеристики трёх видов двигателей (синхронного СД, асинхронного АД, двигателя постоянного тока ДПТ) и механизма с вентиляторной механической характеристикой. Точки пересечения характеристик (а, в, с) соответствуют установившемся скоростям валов двигателей и вентилятора при подключении вентилятора отдельно к каждому из двигателей.
Механическая характеристика двигателя и механизма позволяет определить скорость, момент, мощность и диапазон регулирования скорости D =  , если её нужно регулировать двигателем.
, если её нужно регулировать двигателем.
Механическая характеристика необходима так же для определения времени перехода от одной скорости к другой, например, при пуске и остановке, так как от времени перехода зависит производительность и экономичность показателей всего устройства.

Рис. 4.4 Механические характеристики 
Любые изменения нагрузки рабочего механизма, включение или выключение двигателя, подключение резисторов в силовую цепь двигателя, изменение напряжения и т.д. – все эти изменения приводят к ускорению  или замедлению
или замедлению  скорости привода и появлению динамического момента
скорости привода и появлению динамического момента  , который нагружает либо разгружает вал электродвигателя
, который нагружает либо разгружает вал электродвигателя
 . (4-11)
. (4-11)
Что бы определить возможные перегрузки двигателя (по моменту и мощности) во времени нужно знать, как изменяется момент, и мощность двигателя во времени (в течение рабочего цикла), то есть иметь нагрузочную диаграмму элетропривода.
Режими роботи електродвигунів у квадрантах системи координат кутова швидкість - момент ω (M)
Как указывалось выше за положительное направление статического момента сопротивления механизма 
 принято направление противоположное направлению электромагнитного момента двигателя
принято направление противоположное направлению электромагнитного момента двигателя  .
.
Механические характеристики изображают на плоскости в прямоугольной системе координат с осями  и
и  (рис. 4.5). Положение точки на плоскости, характеризуемое двумя координатами
(рис. 4.5). Положение точки на плоскости, характеризуемое двумя координатами  и
и  , определяет режим работы электродвигателя.
, определяет режим работы электродвигателя.
При принятых положительных направлениях для  и
и  точкаустановившегося режима определяется точкой пересечения характеристик двигателя и механизма за исключением осей координат.
точкаустановившегося режима определяется точкой пересечения характеристик двигателя и механизма за исключением осей координат.
Любая точка квадрантов I и III, где знаки скорости и момента одинаковы, соответствует положительному значению мощности, то есть полезной работе, совершаемой двигателем (произведение момента на скорость получается положительным).
Двигатель при  ω > 0, то есть полжительной мощности (
ω > 0, то есть полжительной мощности ( преобразует электрическую энергию в механическую.
преобразует электрическую энергию в механическую.
Наоборот, точки квадрантов II и IV, где знаки скорости и момента не совпадают, относятся к потреблению двигателем механической энергии ( ω < 0).
ω < 0).
В случае ω < 0 двигатель преобразует механическую энергию в электрическую.
Электрическая машина в двигательном режиме развивает движущий момент, а в генераторном тормозной момент.

Рис. 4.5 Области двигательного и генераторного режимов электропривода на плоскости  и
и  .
.
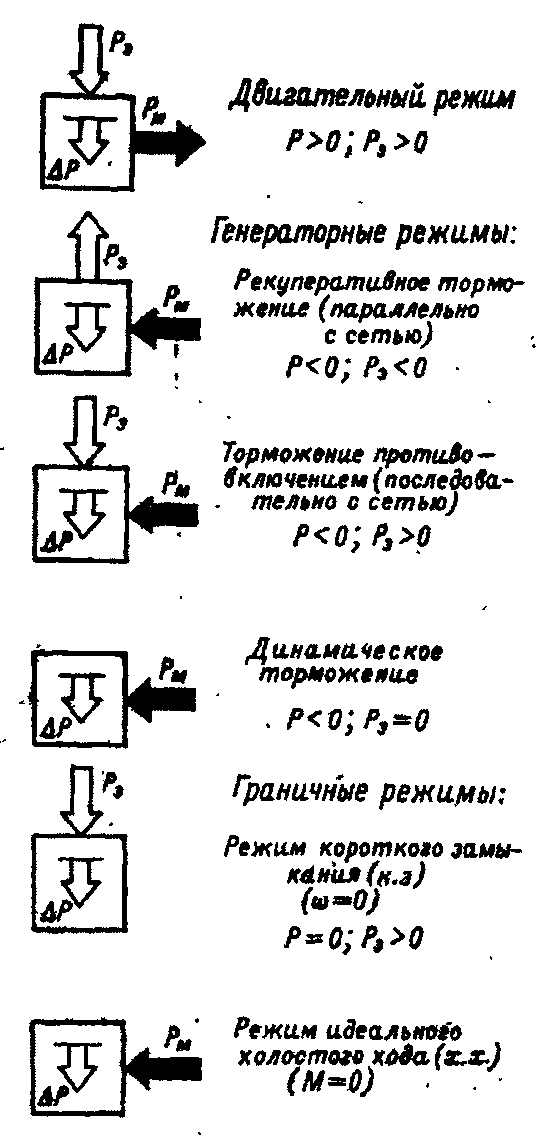
В отличие от двигательного режима, генераторных режимов может быть несколько, в зависимости от того, как используется преобразованная электрическая энергия.
Преобразованная электрическая энергия — это энергия, полученная при переходе механической энергии двигателя в электрическую (например при спуске груза или движении транспортного средства под уклон).
Генераторные режимы энергетически классифицируются следующим образом.
1. Генераторный режим с отдачей энергии в сеть — это режим рекуперативного торможения.
В этом случае преобразованная электрическая энергия за вычетом потерь отдается машиной в сеть. Баланс мощностей выражается следующим образом:

где: РМ – механическая мощность на валу двигателя;
РЭ – электрическая мощность, поступающая в сеть;
 – мощность потерь в силовых цепях двигателя.
– мощность потерь в силовых цепях двигателя.
Переход из двигательного режима в режим рекуперативного торможения возможен при повышении скорости двигателя сверх скорости, идеального холостого хода, когда = 0. Факт получения тормозного момента в двигателе с одновременной отдачей им энергии в сеть позволяет считать данный режим торможения экономичным.
2. Режим торможения противо–включением.
В этом случае электрическая машина потребляет как механическую энергию с вала, так и электрическую энергию из сети. Суммарная энергия расходуется в силовых цепях двигателя в виде потерь мощности , т. е.

Этот режим характеризуется большими электрическими потерями.
3. Режим динамического торможения. В этом случае на потери в силовой цепи двигателя расходуется только преобразованная электрическая энергия. Энергию из сети машина не получает она отключена от сети, т. е.

Вся механическая мощность РМ –на валу двигателя превращается в – мощность потерь в силовых цепях двигателя.
Для осуществления режима динамического торможения двигатель обычно отключают от сети и в его силовую цепь вводят дополнительное сопротивление.
В отдельных случаях электрическая машина, подключенная к питающей сети, может тем не менее не обмениваться с ней активной мощностью, а потреблять механическую мощность с вала и преобразовывать ее в потери, т. е. также работать в режиме динамического торможения.
Выражения (1–40)—(1–42) учитывают мощности и потери только в процессе электромеханического преобразования энергии из электрической в механическую.
Потери, связанные с созданием магнитного потока машины, не включены в балансы мощностей. На рис. 4.6 показаны возможные энергетические режимы двигателя.
Граничные режимы, отделяющие двигательные режимы от генераторных, соответствуют определенным точкам на координатных осях (рис.4.5).
Там, где = 0 при  , имеет место так называемый идеальный холостой ход двигателя. Чтобы машина могла работать в данном режиме, требуется к ее валу подвести небольшую мощность, компенсирующую механические потери и дополнительные потери вне силовых цепей.
, имеет место так называемый идеальный холостой ход двигателя. Чтобы машина могла работать в данном режиме, требуется к ее валу подвести небольшую мощность, компенсирующую механические потери и дополнительные потери вне силовых цепей.
При  = 0 и
= 0 и  имеет место так называемый режим короткого замыкания. В этом случае механическая мощность равна нулю, а потребляемая из сети электрическая энергия полностью ра
имеет место так называемый режим короткого замыкания. В этом случае механическая мощность равна нулю, а потребляемая из сети электрическая энергия полностью ра
Рис. 4.6 Энергетические диаграмм режимов работ двигателя