




Ауытқу бойынша әсерлі ажыратылған автоматты басқару жүйесі деп басқарушы әсер өлшенетін сыртқы ауытқу әсерлеріне байланысты құрылатын және олардың орнын толықтыруға бағытталған жүйелерді айтамыз. Бұл жағдайларда инварианттық принципі қолданылады.
Инварианттылық дегеніміз басқарылатын шаманың осы әсерлерді толықтырумен пайда болатын ауытқу әсерінен толық немесе тәуелсіздігін айтамыз.
Нақты жүйелерде реттеу прогресіне аса едәуір әсер беретін негізгі ауытқуларды өлшеуге болады. Негізгі ауытқуларға әдетте жүктеменің өзгерісі жатады. Бұл өзгерісті өлшеуге болады және берілген программалы жүйенің жеткілікті дәлкөрсетуді қамтамасыз ететін орнын толықтырушы әсерді құруға болады. Бұл кезде орны толықтырылмаған қосымша ауытқулар немесе бөгеттер жүйенің жұмыс істеу режиміне зиян әсер көрсетеді.
Бөгеттердің әсерін жою үшін оларды да өлшеу және толықтыру қажет. Дегенмен мұны іс жүзінде әрқашан жүзеге асыра алмайсың, сондықтан ауытқу бойынша басқару принципі басқарылатын объект күшті өзін – өзі түзету қасиетіне ие болған жағдайда ғана қолданылады. Бұл жағдайда бөгеттердің объектінің жұмыс істеу режиміне әсерін елемеуге болады. егер, басқарылатын объектіде өзін – өзі түзету қасиеті болмаса, онда ауытқу бойынша басқаруды қолдануға болмайды. Бұл жағдайда бөгеттердің әсері басқарылатын шамасының негізгі әсер өлшегіші реттелмейтінберілген мәннен ауытқуы бірте – бірте жоғарлай беруіне алып келеді. «Нөльмен жылжу» деп аталатын жинақталған ауытқу жүйені іс жүзінде жұмысқа қабілетсіз етеді.
Ауытқу бойынша басқару жүйелерінде ауытқу бойынша реттеу жүйелерінде бар кері байланысқа ұқсас кері байланыс жоқ екенін айта кеткен жөн. Ауытқу бойынша басқару жүйелерінде ауытқу шамасына байланысты басқарушы әсер құрылады, ол жүйенің кірісіне беріледі де, ауытқу әсерінің сол немесе басқа дәрежесін толықтырады (компенсирлейді). Бірақ басқарудың соңғы нәтижесі – басқарылатын шаманың сәйкестігі берілген мәнен қалай болса солай ерекшеленуі мүмкін, бірақ бұл басқару әсеріне әсер етпейді және басқаруға түзетулер енгізілмейді.
Автоматты басқару жүйелерінде ауытқу әсері әртүрлі құрылғылармен жүзеге асырылуы мүмкін, олардың негізгілері параметрлі тұрақтандырудың компаундирлеуі және өлшеу – есептеу құрылғылары.
Компаундирлеу (компаундирование) электр желісінің жүктелуінен пайда болған ауытқудың орнын толтыру үшін электр машиналарында қолданылады мысалы ретінде тұрақты ток қозғалтқышын компаундирлеуді қарастырамыз (11.1 сурет). Қозғалтқышта негізгі магнит ағынын тудырушы 1 басты ауытқу орамалары бар. Якорь орамасына Мс сыртқы жүктеме әсерін компенсирлеуге арналған қосымша 2 орамалар тізбектеп қосылған.
Орнықты режимде Мдв қозғалмалы момент пен кедергі моменттері тең және жылдамдық  Номиналды жүктемеге
Номиналды жүктемеге  және
және  жылдамдығы сәйкес келеді.
жылдамдығы сәйкес келеді.
Кедергі моментін жоғарлатқан кезде айналу жылдамдығы азаяды, ал якорь тізбегі мен қосымша орамалардан 2 ағып өтетін  тогының шамасы кері э.қ.к.
тогының шамасы кері э.қ.к.  азаю салдарынан жоғарлайды.
азаю салдарынан жоғарлайды.
 (11.1)
(11.1)

11.1. Сурет. Тұрақты токты қозғалтқышын компаундирлеу
2 орамалармен туатын магнитті ағын 1 басты орамалардың ағынына қарсы бағытталғандықтан, машинаның  жалпы ағыны төмендейді. Тұрақты ток машинасының қозғалу моменті мына өрнекпен анықталады.
жалпы ағыны төмендейді. Тұрақты ток машинасының қозғалу моменті мына өрнекпен анықталады.  (11.2)
(11.2)
 мәнін (11.1) өрнегіне қойып шығып, ал содан кейін алынған
мәнін (11.1) өрнегіне қойып шығып, ал содан кейін алынған  мәнін (11.2) өрнекке қойып шықсақ, аламыз
мәнін (11.2) өрнекке қойып шықсақ, аламыз 
Ф магнит ағынын қозғалтқыштың жіберілген жүктемесіне сәйкес аралықта азайту кезінде (11.3) өрнегінің жақша ішіндегі шамалардың айырымы жоғарлайды, және сәйкесінше жүктеме моментін жоғарлатуға сәйкес қозғалыс моментінде жоғарлайды.
Қозғалтқыштың айналу жылдамдығы бұл кезде компаундирлеу болған кезге қарағанда едәуір кіші дәрежеге төмендейді. Жылдамдықты төмендету шамасы 2 қосымша орамалардың талшықтар санына тәуелді.
Компаундирлеу өзін – өзі түзетуі жоғары қатты механикалық сипаттамасы жеткілікті қозғалтқыш үшін ғана әсер береді.
Негізгі әдебиет: 3 [172-243].
Қосымша әдебиет: 1 [301-322]; 2 [285-360].
Бақылау сұрақтар:
№ 14 Дәрістің конспектісі
Дәрістің тақырыбы: Негізгі әсері бойынша басқару жүйелері, комбинирленген жүйелер (қиыстырылған). Осы жүйелердегі компенсаторлар реттегішін синтездеу.
Параметрлі тұрақтандыру құрылғылары тұрақтанатын жүйенің қасиеттерін сыртқы ауытқулардың әсерінен өзгертетін жұмыс істеу режимінің тұрақтылығын ұстанады.
Параметрлік стабилизаторға мысал болып стабилизаторы ретінде жұмыс істейтін бареттер бола алады (11.2. сурет).
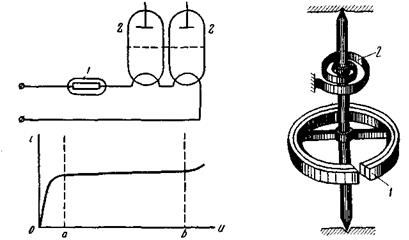
1-2.Сур. Бареттер схемасы және 11-3. Сур. Температуралық
оның вольтамперлі сипаттамасы компенсациясы бар
балансирленген механизмі.
Бареттер 1 сумен толтырылған шыны баллонға орналастырылған темір сымды береді. Бареттердің вольтамперлік сипаттамасы бейсызықты, және де  аймағында қоректену кернеуін өзгерткен кездегі жұмысшы токтың шамасы өте аз өзгереді.
аймағында қоректену кернеуін өзгерткен кездегі жұмысшы токтың шамасы өте аз өзгереді.
Бареттер шамасы тұрақты ток тұру қажет жүктемемен тізбектеп қосылады. 11.2. суреттерде мұндай жүктеме электрондық шамдардың 2 іліну тізбегі болып табылады.
Параметрлік тұрақтандыруға басқа мысал болып стрелкалардың қозғалысын бірқалыпты ұстап тұратын автоматтық аспап болып табылатын сағаттардың жүрісін температуралық компенсациялау құрылғысы бола алады.
Сағаттың жүру дәлдігі баланысты механизмнің периодты қозғалу дәлдігімен анықталады, баланыстық механизм стрелкалардың дөңгелек бір тісіне әрбір тербелу периоды қозғалу дәлдігіменанықталады, баланыстық механизм стрелкалардың дөңгелектің бір тісіне әрбір тербелу периоды сайын орналасуын жүзеге асырады. Баланыстың механизм серіппелі 2 маховик шеңберіне шоғырланған. Маковиктің тербеліс пероды мына формуламен анықталады.
 (11.4)
(11.4)
мұндағы  тұрақты;
тұрақты;
 маховиктің инерция моменті;
маховиктің инерция моменті;
С – серіппенің қаттылығы.
Температураны өзгерткен кезде баланыстық механизмнің тербеліс периоды серіппенің қаттылығы мен маховиктің геометриялық өлшемдерін өзгерткеннен ауысады (өзгереді). Температураның әсерін компенсирлеу үшін маховик шеңбері биметалды және кескіш болып жасалады. Температураны өзгерткен кезде шеңбердің бос ұштары центрге бүгіледі немесе сыртқа ашылады, ол инерция моментін серіппе қаттылығы өзгеретін дәрежеде өзгеруіне алып келеді. (11.4) формуласындағы түбір асты өрнек тұрақты болып қалады, және сәйкесінше баланыстық механизмнің тербеліс периоды тұрақты болып қалады.
Өлшеп – есептеу құрылғылары немесе өзінше орнатылатын программасы бар құрылғы мына бөліктерден тұрады: ауытқу шамасын өлшейтін өлшегіш; және өлшеу нәтижелері бойынша өлшеген ауытқу әсерін компенсирлеуші басқарушы әсердің программасын құратын есептегіш.
Қазіргі кезде өлшеп – есептеу құрылғыларының көптеген мөлшері ұсынылған, олар бір – бірінен әрекет ету принципі, басқарушы әсердің программаларын құру тәсілдерімен ерекшеленеді. Кейбір жағдайларда күрделі есептеу құрылғылары қолданылады, басқада – есептеу құрылғылары шамамен қарапайым.
Мысал ретінде статикалық жүктемеге байланысты кешігу периодындағы шахталы көтеру машинасын автоматты басқару үшін О.Г. Кервалишвили ұсынған өлшеу – есептеу құрылғысын қарастырамыз [16].
Бұл құрылғының жеңілдетілген схемасы 11.4. суретте келтірілген. Асинхронды көтеру қозғалтқышының статор тізбегіндегі тогы қоректену кернеуі тұрақты болған кезде көтеру машинасының статикалық жүктемесіне пропорционал. ВС түзеткіш көпірдің шығысындағы түзетілген кернеудің шамасы көтеру қозғалтқыш статорының тізбегіне қосылған ТТ ток трансформаторының алғашқы орамасындағы токтың шамасына, және сәйкесінше көтеру машинасының статикалық жүктеме шамасына пропорционал.
ПН потенциометрінен алынатын  кернеуі ПЭТ эталондық кернеумен қоректенетін ПЭТпотенциометрінен алынатын кернеумен салыстырылады.
кернеуі ПЭТ эталондық кернеумен қоректенетін ПЭТпотенциометрінен алынатын кернеумен салыстырылады.  мен
мен  кернеулері қарама – қарсы қосылған. Егер эталондық потенциометрден алынған кернеу – ге тең болса, онда РП полярланған реле катушкасының тізбегінде ток болмайды. Егер эталаонды потенциомертдің
кернеулері қарама – қарсы қосылған. Егер эталондық потенциометрден алынған кернеу – ге тең болса, онда РП полярланған реле катушкасының тізбегінде ток болмайды. Егер эталаонды потенциомертдің  аймағындағы, кернеу құламасынан ерекшеленсе, онда РП реле жұмыс істейді де, кернеудің айырымының таңбасына байланысты тәуелсіз ауытқуы бар Д қозғалтқыш якорының тізбегінде РП1 немесе РП2 байланыстары тұйықталады және оны кернеуіне қосады.
аймағындағы, кернеу құламасынан ерекшеленсе, онда РП реле жұмыс істейді де, кернеудің айырымының таңбасына байланысты тәуелсіз ауытқуы бар Д қозғалтқыш якорының тізбегінде РП1 немесе РП2 байланыстары тұйықталады және оны кернеуіне қосады.
Д қозғалтқышы айнала отырып, эталонды реостат ползуногын кернеуі мен аймағындағы кернеу арасындағы айырымын азайту бағытында орналастырады. Бұл айырым нөльге жақындағанда, РП полярлы реле катушкасының тізбегіндегі ток нөльге дейін азаяды, ол өзінің якорын жіберіп, Д қозғалтқыш якорын кернеу көзінен өшіріп қояды.
Қозғалтқыш айналған кезде сонымен қатар электр машиналы күшейткіштің ЭМУ (ЭМК) басқарушы орамасына кернеу алынатын ПУ басқару потенциометірінің ползуногын орналастырады. Соңғысын тежеу моментін көтеру қозғалтқышының статикалық жүктемесіне сәйкес орната отырып, тежегіш желімен (сыммен) басқарады.

11.4. Сурет. Ауытқумен әсер ететін жүйе
Токтың трансформаторы, түзеткіш көпір, эталаондық потенциометр, полярлық реле және қозғалтқыш өзінше құрылғының өлшеу бөлігін көрсетеді, ал көтеру қозғалтқышының статикалық жүктемесін көтеру машинасының бірқалыпты жүру периодында компенсациялық әдіспен өлшейді. Қозғалтқыш пен басқарушы потенциометр өзінше құрылғының есептеу бөлігін көрсетеді, ал өлшеу нәтижелеріне байланысты тежегіш желісін басқару программасын орнатады. Соңғысы бірқалапты жүру периоды аяқталғаннан кейін кешігу периодында жұмыс істейді осылай, қозғалтқыш пен басқарушы потенциометр сонымен қатар есте сақтау құрылғысының ролін де орындайды, ол басқару программасын тегегіш желімен есте сақтайды және кешігу кезеңінде оны өзгертпейді, өйткені бұл кезеңде көтеру қозғалтқышы желіден өшіріліп, бірмезгілде өлшеу бөлігі де өшіріледі.
Негізгі әдебиет: 3 [324-348].
Қосымша әдебиет: 3 [216-243].
Бақылау сұрақтар:
1. Қатаң программалы ажыратылған автоматты реттеу жүйесі дегеніміз не?
2. Инварианттылық дегеніміз не?
3. Қоздыру әсеріндегі реттеу принципін таза түрінде қандай жағдай да қолдануға болады?
4. Қоздыру бойынша компенсирлеуші әсер қандай тәсілдермен жүзеге асырылады?
5. Құрастырылған автоматты реттеу жүйесі дегеніміз не? Автоматты реттеу жүйесінің құрастырылуы қалай аталады?
6. Жүйенің қоздыру әсеріне әрекет ететін компенсациялауға қалай жетуге болады?
7. Құрастырылған автоматты реттеу жүйесіндегі параметірлерді қалай таңдап аламыз?
№ 15 Дәрістің конспектісі
Дәріс тақырыбы: Көпбайланысты реттеу жүйелерін синтездеу. Өнеркәсіптік басқару жүйелерінің негізгі идентификациялау әдістері.

