




САУ характеризуются не только устойчивостью, но и другими динамическими характеристиками или свойствами. К таким динамическим свойствам относятся:
- Поведение системы в начальный момент времени (сразу после приложения воздействия).
- Характер поведения управляемой переменной в переходном процессе.
- Поведение системы при приближении к новому установившемуся состоянию.
- Длительность перехода системы из одного установившегося состояния в другое.
Если при рассмотрении устойчивости линейных систем было определено, что устойчивость не зависит от входных воздействий, а определяется только параметрами системы, то при исследовании качества вид входного воздействия и его амплитудное значение имеют существенное значение.
Все методы анализа качества переходного процесса можно разделить на две группы:
1. Прямые методы – это непосредственное решение дифференциальных уравнений, которые описывают систему и выполнение графического построения переходного процесса. Эти методы наиболее точны и находят все более широкое применение.
Прямые показатели качества оценивают по переходным характеристикам. При этом прямые показатели качества делят на:
Основные:
1. Вид переходной характеристики.(колебательная, амплитудная и т. д.)
2. Время переходного процесса( )(длительность регулирования)
)(длительность регулирования)
3. Величина наибольшего отклонения в переходном процессе – перерегулирование.( ,%)
,%)
4. Величина допустимой установившейся ошибки(∆, % от y∞).
5. Колебательность переходного процесса, характеризуется числом колебаний за время регулирования.
Вспомогательные:
1. Время установления( )- время, за которое выходная величина достигает максимального значения.
)- время, за которое выходная величина достигает максимального значения.
2. Время запаздывания( ) – время, за которое выходная величина изменяется от 0 до 0.5установившегося значения.
) – время, за которое выходная величина изменяется от 0 до 0.5установившегося значения.
3. Время нарастания(tнар) – время, за которое выходная величина изменяется от 10 до 90% своего установившегося значения.

2. Косвенные методы позволяют обойти непосредственное решение уравнений, описывающих систему. Применяют обычно следующие косвенные методы:
1. Корневые (основаны на факте зависимости переходного процесса от корней характеристического уравнения, таким образом, зная корни хар-го ур-ния, можно оценить вид и некоторые параметры переходного процесса).
2. Частотный (основан на взаимной связи переходных процессов и частотных характеристик САУ, их удобно использовать совместно с исследованием устойчивости по критерию Найквиста).
3. Интегральные (нацелены на получение общей оценки скорости затухания и величины отклонения регулируемого параметра одновременно).
Сущностью косвенных методов является:
- Замена точного управления динамики САУ приближенным за счет отбрасываемых слагаемых левой части, имеющих на нерасчетных частотах малые значения, а также замена сложной функции внешнего воздействия более простой функцией.
- Оценка качества процесса по распределению нулей и полюсов ПФ с использованием нормировочных диаграмм
- Использование интегральных оценок и метода стандартных коэффициентов при приближении некоего процесса к некоторому эталонному
- Оценка качества процесса по виду вещественной ЧХ
Замена точного управления приближенным является наиболее частым способом при косвенной оценке качества. Такая аналитическая аппроксимация может быть применена предварительно к ПФ.
По виду переходных процессов можно определить следующие показатели качества:

Монотонный Колебательный Апериодический S- образный
Это группа процессов статических объектов.
В динамических объектах:
1 - идеально интегрирующее звено
2 - реально интегрирующее звено
1 2
Основным показателем качества систем является установившаяся(статическая) ошибка. Допустимое значение статической ошибки ( ) не должно превышать 5% от
) не должно превышать 5% от  .
.
Синтез САР. Регуляторы.
Под синтезом САР понимают работу по расчету ее рациональной структуры и оптимальных параметров отдельных элементов. При решении задачи синтеза часть структуры системы, например, объект управления, регулирующие органы, средства измерения и т.д., известны. Неизвестной является регулирующая часть САР. Задачей математического синтеза является определение оптимального, т.е. наилучшего в данных условиях, алгоритма или закона регулирования.
Для большинства используемых в тепловой автоматике САР структура и алгоритмы регулирования известны. Например, САР уровня жидкости, так называемый трехимпульсный регулятор, реализующий пропорционально-интегральный закон, обеспечивает требуемое качество регулирования. В этом случае задача синтеза сводится к расчету параметров этого регулятора на основе характеристик конкретного объекта, регулирующих органов и т.д.
Такую задачу часто называют инженерным синтезом. Задачу инженерного синтеза можно считать завершенной, если расчет качества ожидаемого переходного процесса удовлетворяет требованиям к системе. Не исключены случаи, когда в рамках выбранной структуры это сделать не удается. Тогда приходится использовать дополнительные сигналы, например, возмущениия производимые от отклонения, использовать местные обратные связи, вводить корректирующие устройства.
Имея в наличии структуру, алгоритм и его численные параметры, можно решать третью задачу – техническую реализацию. В подавляющем большинстве случаев регулятор регулятор собирается из стандартных блоков, поэтому под синтезом понимают более узкую задачу – расчет корректирующих устройств САР.
ПИД-регулятор
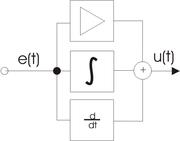
Схема, иллюстрирующая принцип работы ПИД-регулятора
Пропорционально-интегрально-дифференциальный (ПИД) регулятор — устройство в цепи обратной связи, используемое в системах автоматического управления для поддержания заданного значения измеряемого параметра. ПИД-регулятор измеряет отклонение стабилизируемой величины от заданного значения (уставки) и выдаёт управляющий сигнал, являющийся суммой трёх слагаемых, первое из которых пропорционально этому отклонению, второе пропорционально интегралу отклонения и третье пропорционально производной отклонения (или, что то же самое, производной измеряемой величины).
Если какие-то из составляющих не используются, то регулятор называют пропорционально-интегральным, пропорционально-дифференциальным, пропорциональным и т. п.
Общие сведения

