




Сигналы, действующие в АСУ, могут быть непрерывными и дискретными. В соответствии с этим АСУ делятся на непрерывные и дискретные.
В непрерывных системах сигналы в процессе их преобразования звеньями системы не прерываются.
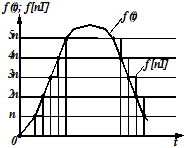
В дискретных системах имеются звенья, преобразующие непрерывные сигналы в ряд квантованных (дискретных) сигналов или последовательность импульсов. Таким образом, дискретный сигнал, определяемый последовательностью значений а0, а1, а2, …, аn, …, вообще говоря бесконечный (рис.1.1).

Рис.1.1. Дискретизация непрерывного сигнала
Эти значения образуют решетчатую функцию  . Её можно представить как результат измерения некоторой непрерывной функции
. Её можно представить как результат измерения некоторой непрерывной функции  в равноотстоящие моменты времени
в равноотстоящие моменты времени  .
.
Выделение дискретных значений  называют также квантованием (дискретизацией) сигнала по времени. Вообще процесс преобразования непрерывных сигналов в дискретные называют квантованием [2-4]. Существенно, что между моментами квантования сигнал не определен. Величину T (см. рис. 1.1) называют периодом или шагом квантования. Различают 3 способа квантования:
называют также квантованием (дискретизацией) сигнала по времени. Вообще процесс преобразования непрерывных сигналов в дискретные называют квантованием [2-4]. Существенно, что между моментами квантования сигнал не определен. Величину T (см. рис. 1.1) называют периодом или шагом квантования. Различают 3 способа квантования:
- квантование по времени;
- квантование по уровню;
- квантование по уровню и времени (смешанное квантование).
В зависимости от способа квантования различают релейные, импульсные и цифровые АСУ, что иллюстрируется на рис.1.2.
| Квантование по уровню | Квантование по времени | Квантование по уровню и времени |
| 
| 
|
| а) Релейные АСУ | б) Импульсные АСУ | в) Цифровые АСУ |
Рис.1.2. Способы квантования непрерывного сигнала
Сигналы, дискретные по уровню, получаются в результате квантования сигнала или фиксации дискретных уровней в произвольные моменты времени. Системы, включающие такие элементы, называют релейными. Благодаря простоте реализации и приемлемому качеству работы релейные системы получили широкое распространение в бытовой технике, например, системы регулирования температуры в холодильных и электронагревательных приборах.
При квантовании сигнала по времени величины непрерывных сигналов фиксируются в дискретные моменты времени  . Такое квантование осуществляет импульсный элемент, а системы, его содержащие, называют импульсными. Примерами импульсных систем могут служить системы радио- и оптической локации, системы с частотными датчиками.
. Такое квантование осуществляет импульсный элемент, а системы, его содержащие, называют импульсными. Примерами импульсных систем могут служить системы радио- и оптической локации, системы с частотными датчиками.
При одновременном квантовании по уровню и времени непрерывный сигнал в дискретные моменты времени заменяется дискретными по уровню значениями, ближайшими к значению непрерывного сигнала. При этом непрерывная величина преобразуется в цифровую, и система называется цифровой. К цифровым системам относятся системы автоматического управления, в замкнутый контур которых включается цифровое вычислительное устройство, что позволяет реализовать сложные алгоритмы управления. Включение цифрового вычислительного устройства в контур системы управления сопряжено с преобразованием непрерывных величин в дискретные на входе и с обратным преобразованием на выходе.
Развитие дискретных систем обусловлено постоянно повышающимися конструктивными, эксплуатационными и метрологическими требованиями к управлению [5]. Например, в современных электромеханических системах требуется обеспечивать перемещение со скоростью достигающей 0,5 м/с, поддерживать эту скорость с погрешностью около 1%. Погрешность позиционирования при этом не должна превышать 1-2 мкм. Аналоговая система управления не может обеспечить таких показателей из-за инерционности и дрейфа нуля операционных усилителей, на которых, как правило, реализуются устройства управления. Кроме того, при изменении режима работы системы необходимо перестраивать параметры регулятора, а возможно и менять саму структуру системы управления. Эта операция требует значительных затрат времени, а, следовательно, ведет к снижению производительности оборудования.
В дискретных системах отсутствует дрейф нуля, они обладают более высокой помехозащищенностью и устойчивостью к возмущениям, имеют меньшие габариты и вес. Закон управления в них реализуется программно, что позволяет быстро перестраивать параметры регуляторов, а при необходимости и структуру. Применение микропроцессоров в дискретных системах также позволяет расширить функции управления, например, организовать тестовый контроль за работой элементов системы, своевременно обнаружить тенденцию к нарушению работоспособности элементов системы, указать место “отказа” системы, учесть физические ограничения элементов.
Далее рассматриваются только импульсные системы.

