




В случае дискретных систем с коррекцией на входе непрерывной части (см. рис. 1.50) структурную схему сводят к эквивалентной непрерывной схеме на основании следующих преобразований
 (1.62)
(1.62)
Моделью идеального импульсного элемента (ИИЭ) можно считать
 (1.63)
(1.63)
Для экстраполятора нулевого порядка 
Согласно выражению (1.34),  .
.
Если  , то
, то  ,
,  и передаточная функция импульсного элемента
и передаточная функция импульсного элемента
 . (1.64)
. (1.64)
Таким образом, реальный импульсный элемент с устройством хранения информации вносит запаздывание, равное  . Преобразованная таким образом структурная схема показана на рис. 1.51.
. Преобразованная таким образом структурная схема показана на рис. 1.51.
На практике при моделировании применяют более точное выражение
 . (1.65)
. (1.65)
Как следует из (1.65), эта передаточная функция соответствует неминимально-фазовому звену.
 |
Рис. 1.51. Преобразованная структурная схема дискретной системы
При принятии решения о замене дискретной системы эквивалентной непрерывной системой необходимо сравнить значение периода дискретизации Т с рядом величин, влияющих на процессы в системе. Эквивалентирование возможно при выполнении ряда условий:
1.  , где
, где  – наибольшая частота возмущающих и задающих сигналов. Обычно принимают
– наибольшая частота возмущающих и задающих сигналов. Обычно принимают  .
.
2.  , где
, где  – время регулирования, а п – порядок системы.
– время регулирования, а п – порядок системы.
3. В следящих системах с учетом динамической точности  , где
, где  – заданная ошибка слежения,
– заданная ошибка слежения,  – максимальное ускорение входного сигнала.
– максимальное ускорение входного сигнала.
4. С учетом ухудшения запаса устойчивости  , где
, где  – рабочая частота сигналов в системе.
– рабочая частота сигналов в системе.
5. С учетом показателя колебательности  .
.
Из всех ограничений выбирают наиболее жесткое.
После этого осуществляется расчет коррекции методами непрерывных систем. Правильность выбора величины периода дискретизации подтверждается результатами компьютерного моделирования системы.
Пример.
Оценить влияние величины периода дискретизации Т на процессы в системе путем моделирования на ПЭВМ [5]. Структура скорректированной системы приведена на рис. 1.52. Схема моделирования в Simulink – на рис. 1.53.
 |
Рис. 1.52. Структурная схема скорректированной дискретной системы
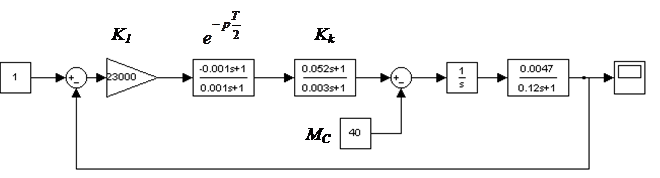
Рис. 1.53. Схема моделирования скорректированной дискретной системы
В результате исследования системы при Т = 0,002 с кривые переходного процесса в непрерывной системе (без элемента  ) и с учетом дискретизации (при наличии ) практически совпали (рис. 1.54). При Т» 0,01 с в системе значительно возрастает перерегулирование (рис. 1.55, а), а при Т = 0,03 – процесс колебательный, расходящийся (рис. 1.55, б).
) и с учетом дискретизации (при наличии ) практически совпали (рис. 1.54). При Т» 0,01 с в системе значительно возрастает перерегулирование (рис. 1.55, а), а при Т = 0,03 – процесс колебательный, расходящийся (рис. 1.55, б).

Рис. 1.54. Переходной процесс в непрерывной и в дискретной системе
при Т = 0,002 с

| 
|
Рис. 1.55. Переходные процессы в дискретной системе:
а – при Т = 0,01 с; б – при Т = 0,03 с
Величина Т = 0,002 с соответствует условию  , где
, где  . В данной системе частота среза
. В данной системе частота среза  .
.
Цифровые ПИД-регуляторы
Рассмотрим последовательность синтеза корректирующего устройства дискретной системы в виде ПИД-регулятора.
Если непрерывный ПИД-регулятор описывается передаточной функцией
 (1.66)
(1.66)
и непрерывным уравнением  , то цифровой ПИД-регулятор описывается дискретной передаточной функцией и разностным уравнением. Получим дискретную передаточную функцию интегратора, который описывается уравнением
, то цифровой ПИД-регулятор описывается дискретной передаточной функцией и разностным уравнением. Получим дискретную передаточную функцию интегратора, который описывается уравнением
 , (1.67)
, (1.67)
что соответствует правилу прямоугольников (метод Эйлера) численного интегрирования.
Применив к уравнению (1.67) z–преобразование, получим 
 , а при нулевых начальных условиях
, а при нулевых начальных условиях
 . (1.68)
. (1.68)
Дифференцирование описывается разностным уравнением
 , (1.69)
, (1.69)
а передаточная функция будет иметь вид
 . (1.70)
. (1.70)
Объединяя передаточные функции пропорционального, интегрирующего и дифференцирующего звеньев, получим передаточную функцию цифрового ПИД-регулятора
 . (1.71)
. (1.71)
Этой передаточной функции соответствует разностное уравнение
 . (1.72)
. (1.72)
Пример.
Пусть при коррекции непрерывной системы получен ПИД-регулятор с передаточной функцией  . Необходимо записать передаточную функцию дискретного регулятора с периодом дискретизации Т = 0,01 с.
. Необходимо записать передаточную функцию дискретного регулятора с периодом дискретизации Т = 0,01 с.
Так как  , а
, а  , то
, то  .
.

