




Часто приходится иметь дело с электронными устройствами, в которых ток I не пропорционален напряжению U; в подобных случаях нет смысла говорить о сопротивлении, так как отношение U / I не является постоянной величиной, независимой от U, а, наоборот, зависит от U. Для подобных устройств полезно знать наклон зависимости U‑I (вольт‑амперной характеристики). Иными словами, представляет интерес отношение небольшого изменения приложенного напряжения к соответствующему изменению тока через схему: ΔU / ΔI (или dU / dI). Это отношение измеряется в единицах сопротивления (в омах) и во многих расчетах играет роль сопротивления. Оно называется сопротивлением для малых сигналов, дифференциальным сопротивлением, динамическим или инкрементным сопротивлением.
Зенеровские диоды (стабилитроны). В качестве примера рассмотрим зенеровский диод (стабилитрон), вольт‑амперная характеристика которого приведена на рис. 1.13.

Рис. 1.13. Вольт‑амперные характеристики.
а – резистор (линейная зависимость); б – зенеровский диод (нелинейная зависимость).
Зенеровские диоды используют для получения постоянного напряжения на каком‑либо участке схемы. Это достигается за счет тока (в грубом приближении постоянного), получаемого от источника большего напряжения в той же схеме. Например, зенеровский диод, представленный на рис. 1.13, преобразует питающий ток, изменяющийся в указанном диапазоне, в соответствующий (но более узкий) диапазон напряжений. Важно понять, как будет вести себя соответствующее напряжение на зенеровском диоде (зенеровское напряжение пробоя) при изменении питающего тока, это изменение есть мера влияния изменений питающего тока. Оно характеризуется динамическим сопротивлением зенеровского диода, определяемым при заданном токе. (Учтите, что динамическое сопротивление зенеровского диода в режиме стабилизации изменяется обратно пропорционально току). Например, динамическое сопротивление зенеровского диода, создающего напряжение стабилизации 5 В, может быть равно 10 Ом при токе 10 мА.
Воспользовавшись определением динамического сопротивления, найдем, чему будет равно изменение напряжения при изменении питающего тока на 10 %: ΔU = RдинΔI = 10·0,1·0,001 = 10 мВ или ΔU / U = 0,002 = 0,2 %. Тем самым подтверждаются высокие стабилизирующие качества зенеровского диода. На практике часто приходится иметь дело с такими схемами, как показанная на рис. 1.14.

Рис. 1.14. Регулятор на зенеровском диоде.
Здесь ток, протекающий через стабилитрон и резистор, обусловлен имеющимся в той же схеме напряжением, большим чем напряжение стабилизации. При этом I = (Uвх – Uвых)/ R и ΔI = (ΔUвх – ΔUвых)/ R, тогда ΔUвых = RдинΔI = (Rдин / R)(ΔUвх – ΔUвых) и наконец, ΔUвых = ΔUвxRдин /(R + Rдин). Следовательно, по отношению к изменениям напряжения схема ведет себя как делитель напряжения, в котором зенеровский диод заменен резистором, сопротивление которого равно динамическому сопротивлению диода при рабочем токе. Приведенный пример показывает, для чего нужен такой параметр, как динамическое сопротивление. Допустим, что в рассмотренной нами схеме входное напряжение изменяется в пределах от 15 до 20 В, а для получения стабильного источника напряжения 5,1 В используется зенеровский диод типа 1NA733 (зенеровский диод с напряжением 5,1 В и мощностью 1 Вт). Резистор сопротивлением 300 Ом обеспечит максимальный зенеровский ток, равный 50 мА: (20 – 5,1)/300.
Оценим изменение выходного напряжения, зная, что максимальное сопротивление для выбранного диода составляет 7 Ом при токе 50 мА. В диапазоне изменения входного напряжения ток через зенеровский диод изменяется от 50 мА до 33 мА; изменение тока на 17 мА вызывает изменение напряжения на выходе схемы, равное ΔU = RдинΔI, или 0,12 В. Другие примеры использования зенеровских диодов вы найдете в разд. 2.04 и 16.14. В реальных условиях зенеровский диод обеспечивает наивысшую стабильность, если он питается от источника тока, у которого по определению Rдин = 
(ток не зависит от напряжения). Но источник тока представляет собой достаточно сложное устройство, и поэтому на практике мы чаще всего удовлетворяемся простым резистором.
Туннельные диоды. Еще один интересный пример использования параметра динамического сопротивления связан с туннельным диодом. Его вольт‑амперная характеристика показана на рис. 1.15.

Рис. 1.15.
В области между точками А и В он обладает отрицательным динамическим сопротивлением. Из этого вытекает важное следствие: делитель напряжения, состоящий из резистора и туннельного диода, может работать как усилитель (рис. 1.16).

Рис. 1.16.
Воспользуемся уравнением для делителя напряжения и для изменяющегося напряжения Uсигн, получим
Uвых = [ R /(R + rt)] Uсигн,
где rt ‑ динамическое сопротивление туннельного диода при рабочем токе, Uсигн – изменение малого сигнала, которое до настоящего момента мы обозначали через ΔUсигн (в дальнейшем мы будем пользоваться этим широко распространенным обозначением). Для туннельного диода rt.дин < 0. Значит, ΔU / ΔI < 0 или u / i < 0 для области вольт‑амперной характеристики туннельного диода, заключенной между точками А и В. Если rt.дин < 0, то знаменатель становится близким к нулю, и схема начинает работать как усилитель. Напряжение uбат создает постоянный ток, или смещение, которое смещает рабочую точку в область отрицательного сопротивления. (Безусловно, во всяком усилительном приборе необходимо иметь источник питания.)
И наконец, в двух словах история туннельных диодов: они появились в конце 50‑х годов, и с ними сразу стали связывать пути разрешения множества проблем схемотехники. Их высокое быстродействие дало основание предположить, что они произведут революцию в области вычислительной техники. К сожалению, оказалось, что эти элементы сложны в использовании; это обстоятельство, а также успешное развитие транзисторов привело к тому, что туннельные диоды сейчас почти не находят применения.
Позже при рассмотрении активных фильтров мы вернемся к явлению отрицательного сопротивления. Тогда вы познакомитесь со схемой преобразователя отрицательного импеданса, которая обеспечивает наряду с другими характеристиками настоящее (а не динамическое) отрицательное сопротивление.
Сигналы
Следующий раздел главы посвящен конденсаторам – элементам, свойства которых зависят от того, как изменяются в схеме напряжения и токи.
Закономерности, с которыми мы познакомили вас при изучении цепей постоянного тока (закон Ома, эквивалентные преобразования схем и др.), сохраняют свою силу и в тех случаях, когда напряжения и токи изменяются по времени. Для лучшего понимания работы цепей переменного тока полезно изучить некоторые распространенные типы сигналов (напряжений, которые определенным образом изменяются во времени).
Синусоидальные сигналы
Синусоидальные сигналы распространены наиболее широко; именно их мы извлекаем из стенной розетки. Если вы услышите выражение «10 мкВ на частоте 1 МГц», то знайте, что речь идет о синусоидальном сигнале. Математическое выражение, описывающее синусоидальное напряжение, имеет вид
U = A sin 2π ft,
где А – амплитуда сигнала, f – частота в циклах в секунду или в герцах.
Синусоидальный сигнал показан на рис. 1.17.
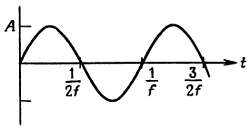
Рис. 1.17. Синусоидальная зависимость изменения амплитуды А от частоты f
Иногда бывает полезно переместить начало координат (t = 0) в точку, соответствующую произвольному моменту времени; в этом случае в выражение для синусоидального напряжения следует включить фазу
U = A sin (2π ft + 
)
Можно также воспользоваться понятием угловая частота и переписать выражение для синусоидального сигнала в другом виде:
U = A sin ωt,
где ω – угловая частота в радианах в 1 с.
Если вы вспомните, что ω = 2π f, то все станет на свои места. Основное достоинство синусоидальной функции (а также основная причина столь широкого распространения синусоидальных сигналов) состоит в том, что эта функция является решением целого ряда линейных дифференциальных уравнений, описывающих как физические явления, так и свойства линейных цепей. Линейная цепь обладает следующим свойством: выходной сигнал, порожденный суммой двух входных сигналов, равен сумме двух выходных сигналов, каждый из которых порожден входными сигналами, действующими не в совокупности, а отдельно: иначе говоря, если Вых. (А) – выходной сигнал, порожденный сигналом А, то для линейной цепи справедливо следующее равенство: Вых. (А + В) = Вых. (А) + Вых. (В). Если на входе линейной цепи действует синусоидальный сигнал, то на выходе также получим синусоидальный сигнал, но в общем случае его амплитуда и фаза будут другими. Это утверждение справедливо только для синусоидального сигнала. На практике принято оценивать поведение схемы по ее амплитудно‑частотной характеристике, показывающей, как изменяется амплитуда синусоидального сигнала в зависимости от частоты. Усилитель звуковой частоты, например, имеет «плоскую» амплитудно‑частотную характеристику в диапазоне от 20 Гц до 20 кГц.
Частота синусоидальных сигналов, с которыми чаще всего приходится работать, лежит в диапазоне от нескольких герц до нескольких мегагерц. Для получения очень низких частот, от 0,0001 Гц и ниже, достаточно аккуратно построить нужную схему. Получение более высоких частот, например до 2000 МГц, также не вызывает принципиальных трудностей, но для сигналов такой частоты нужны специальные линии передач и специальные приемы передачи. Кроме того, здесь приходится иметь дело с микроволновыми сигналами, для которых не подходят привычные схемы, состоящие из отдельных элементов, соединенных между собой проводами, а нужны специальные волноводы.

