Можно определить тип точки покоя и характер ее устойчивости, не находя собственных значений матрицы системы (1), а зная только ее след tr A и определитель det A.
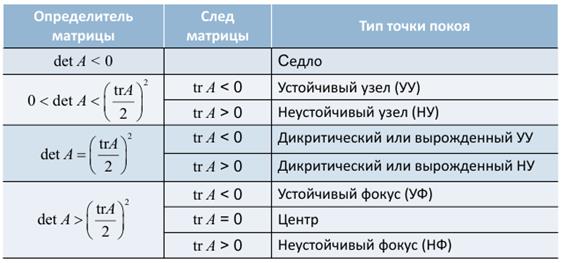
Классификация особых точек линейных двумерных систем

Алгоритм построения фазового портрета ЛДС
1.Определить положения равновесия, решив систему уравнений:
2. Найти собственные значения матрицы системы, решив характеристическое уравнение:

3. Определить тип точки покоя и сделать вывод об устойчивости.
4. Найти уравнения главных изоклин горизонтальной и вертикальной, и построить их на фазовой плоскости.
5. Если положение равновесия является седлом или узлом, найти те фазовые траектории, которые лежат на прямых, проходящих через начало координат.
6. Нарисовать фазовые траектории.
7. Определить направление движения по фазовым траекториям, указав его стрелками на фазовом портрете.
Главные изоклины
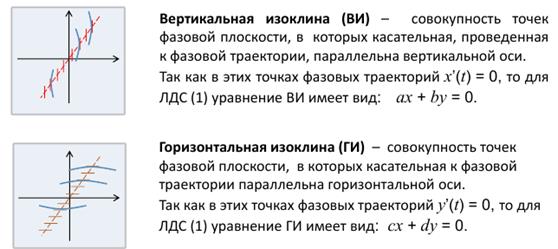
Заметим, что точка покоя на фазовой плоскости это пересечение главных изоклин. Вертикальную изоклину на фазовой плоскости будем помечать вертикальными штрихами, а горизонтальную горизонтальными.
Фазовые траектории
Если положение равновесия является седлом или узлом, то существуют фазовые траектории, которые лежат на прямых, проходящих через начало координат.
Уравнения таких прямых можно искать в виде y = kx. Подставляя y = k x в уравнение:

для определения k получим:

| (4) |
(Уравнения прямых, содержащих фазовые траектории, можно искать и в виде x = ky. Тогда для нахождения коэффициентов следует решить уравнение

Дадим описание фазовых траекторий в зависимости от количества и кратности корней уравнения (4).
Фазовые траектории

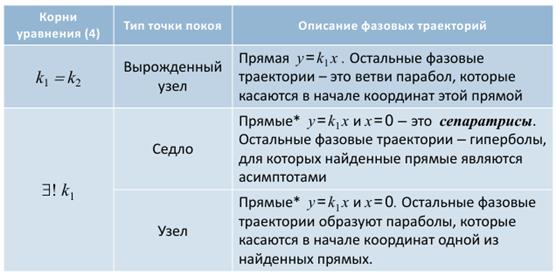
* Если уравнения прямых ищутся в виде x = ky, тогда это будут прямые x = k 1 y и y = 0.

Если положение равновесия является центром, то фазовые траектории являются эллипсами.
Если положение равновесия является фокусом, то фазовые траектории являются спиралями.
В случае, когда ЛДС имеет прямую точек покоя, то можно найти уравнения всех фазовых траекторий, решив уравнение:
Его первый интеграл a x + b y = C и определяет семейство фазовых прямых.
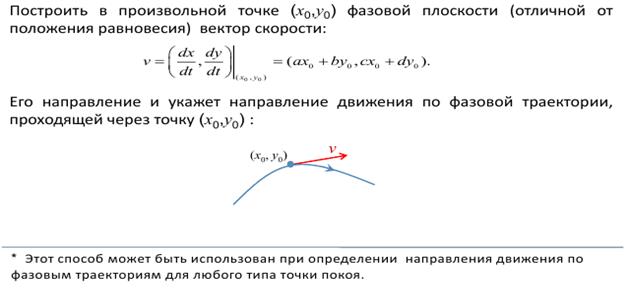
Направление движения
Если положение равновесия является узлом или фокусом, то направление движения по фазовым траекториям определяется однозначно его устойчивостью (к началу координат) или неустойчивостью (от начала координат).
Правда, в случае фокуса требуется установить еще и направление закручивания (раскручивания), спирали по часовой или против часовой стрелки. Это можно сделать, например, так. Определить знак производной y ′(t) в точках оси x.
Когда  если x > 0, то ордината движущейся точки по фазовой траектории при пересечении «положительного луча оси» возрастает.
если x > 0, то ордината движущейся точки по фазовой траектории при пересечении «положительного луча оси» возрастает.
Значит «закручивание (раскручивание)» траекторий происходит против часовой стрелки.
Когда  если x > 0, то «закручивание (раскручивание)» траекторий происходит по часовой стрелки.
если x > 0, то «закручивание (раскручивание)» траекторий происходит по часовой стрелки.
Если положение равновесия является центром, то направление движения по фазовым траекториям (по часовой стрелке или против) можно определить так же, как устанавливается направление «закручивания (раскручивания)» траектории в случае фокуса.

Следовательно, если положение равновесия седло, то достаточно установить направление движения по какой-нибудь траектории. И далее можно однозначно установить направление движения по всем остальным траекториям.
Направление движения (седло)
Чтобы установить направление движения по фазовым траекториям в случае седла, можно воспользоваться одним из следующих способов:
1 способ
Определить, какая из двух сепаратрис соответствует отрицательному собственному значению. Движение по ней происходит к точке покоя.
2 способ
Определить, как изменяется абсцисса движущейся точки по любой из сепаратрис. Например, для y = k 1 x имеем:

Если x (t) → 0 при t → +∞, то движение по сепаратрисе y = k 1 x происходит к точке покоя.
Если x (t) → ±∞ при t →+∞, то движение происходит от точки покоя.
3 способ
Если ось x не является сепаратрисой, определить как изменяется ордината движущейся точки по фазовой траектории при пересечении оси x.
Когда если x > 0,то ордината точки возрастает и, значит, движение по фазовым траекториям, пересекающим положительную часть оси x, происходит снизу вверх. Если же ордината убывает, то движение будет происходить сверху вниз.
Если определять направление движение по фазовой траектории, пересекающей ось y, то лучше анализировать изменение абсциссы движущейся точки.
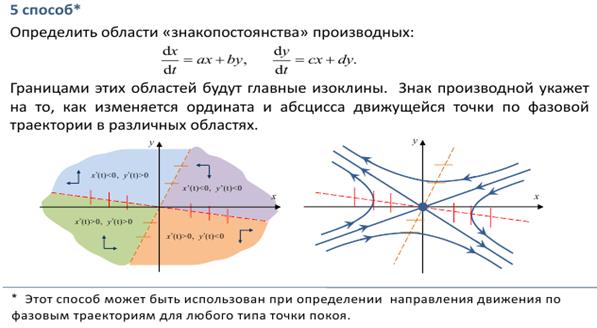
4 способ
Пример 1.
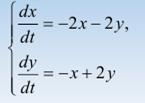
1. Система имеет единственное нулевое положение равновесия, так как
det A = 6 ≠ 0.
2. Построив соответствующее характеристическое уравнение l2 – 6 = 0, найдем его корни l1,2 = ± Ö6. Корни вещественные и разного знака. Следовательно, положение равновесия седло.
Найдем корни характеристического уравнения, или собственные значения, системы уравнений с помощью функции eig.
>> a=[-2 -2;-1 2];
>> eig(a)
ans =
-2.4495
2.4495
3. Сепаратрисы седла ищем в виде y = kx.

4. Вертикальная изоклина: x + y = 0.
Горизонтальная изоклина: x + 2 y = 0.


Пример 2.

1. Система имеет единственное нулевое положение равновесия, так как det A = 10 ≠ 0.
2. Построив соответствующее характеристическое уравнение l2 + 7l + 10 = 0,
найдем его корни l1 = 2, l2 = 5. Следовательно, положение равновесия неустойчивый узел.
>> a=[4 2;1 3];
>> eig(a)
ans =
3. Прямые: y = kx.

4. Вертикальная изоклина: 2 x + y = 0.
Горизонтальная изоклина: x + 3 y = 0.

Найдем собственные вектора матрицы А:
>> A=[4 2;1 3];
>> [U,L]=eig(A)
U =
0.8944 -0.7071
0.4472 0.7071
L =
5 0
0 2
Т.е., собственные значения l1 = 5 и l2 = 2.
Так как l2 = 2 является меньшим по абсолютной величине собственным значением, найдем соответствующий ему собственный вектор:
>> U(:,2)./0.7071
ans =
-1.0000
1.0000
Следовательно, остальные фазовые траектории, образующие параболы, касаются в начале координат прямой y = –x.
Неустойчивость положения равновесия однозначно направление движения – от точки покоя.

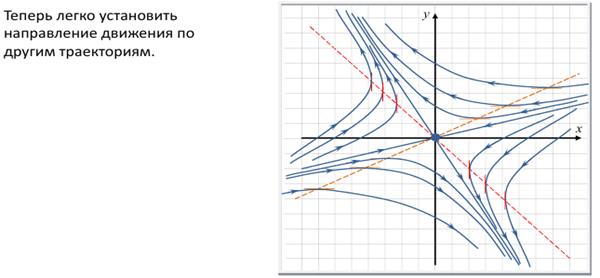
Пример 3.

1. Система имеет единственное нулевое положение равновесия, так как det A = 18 ≠ 0.
2. Построив соответствующее характеристическое уравнение l2 + 3l + 18 = 0,
найдем его дискриминант D = 63. Так как D < 0, то корни уравнения комплексные, причем Re l1,2 = 3/2. Следовательно, положение равновесия устойчивый фокус.
>> a=[-1 -4;4 -2];
>> eig(a)
ans =
-1.5000 + 3.9686i
-1.5000 - 3.9686i
3. Вертикальная изоклина: x + 4 y = 0.
Горизонтальная изоклина: 2 x – y = 0.
Фазовые траектории являются спиралями, движение по которым происходит к началу координат. Направления «закручивания траекторий» можно определить следующим образом.
Определим знак производной y ′(t) в точках оси x. При y = 0 имеем:
 если x > 0.
если x > 0.
Таким образом, ордината движущейся точки по фазовой траектории при пересечении «положительного луча оси x» возрастает.
Значит, «закручивание» траектории происходит против часовой стрелки.
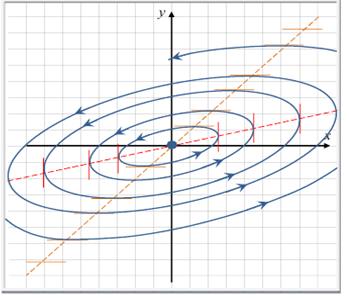
Пример 4.
1. Система имеет единственное нулевое положение равновесия, так как det A = 3 ≠ 0.
2. Построив соответствующее характеристическое уравнение l2+3 = 0, найдем его корни l1,2 = ± i Ö3. Следовательно, положение равновесия центр.
>> a=[1 -4;1 -1];
>> eig(a)
ans =
-0.0000 + 1.7321i
-0.0000 – 1.7321i
3. Вертикальная изоклина: x – 4 y = 0.
Горизонтальная изоклина: x – y = 0.
Фазовые траектории системы эллипсы.
Направление движения по ним можно установить, например, так.
Определим знак производной y ′(t) в точках оси x. При y = 0 имеем:
 если x > 0.
если x > 0.
Таким образом, ордината движущейся точки по фазовой траектории при пересечении «положительного луча оси x» возрастает.
Значит, движение по эллипсам происходит против часовой стрелки.
Пример 5.

Так как определитель матрицы системы det A = 0, то система имеет бесконечно много положений равновесия. Все они лежат на прямой y = 2x.
Построив соответствующее характеристическое уравнение l2 + 5l = 0,
найдем его корни l1=0, l2= –5.
>> a=[-4 2;2 -1];
>> eig(a)
ans =
-5
Следовательно, все положения равновесия устойчивы по Ляпунову.
Построим уравнения остальных фазовых траекторий:

Таким образом, фазовые траектории лежат на прямых 

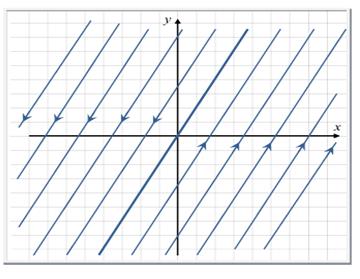
Пример 6.

Так как определитель матрицы системы det A = 0, то система имеет бесконечно много положений равновесия. Все они лежат на прямой y = 2 x.
Так как и след матрицы системы tr A =0, то корни характеристического уравнения l1 = l2 = 0.
>> a=[2 -1;4 -2];
>> eig(a)
ans =
1.0e-015 *
0.0650 + 0.3140i
0.0650 - 0.3140i
Следовательно, все положения равновесия неустойчивы.
Построим уравнения остальных фазовых траекторий:

Таким образом, фазовые траектории лежат на прямых y = 2 x + C, C – const, и параллельны прямой точек покоя.
Установим направление движения по траекториям следующим образом.
Определим знак производной y ′(t) в точках оси x. при y = 0 имеем:
Таким образом, ордината движущейся точки по фазовой траектории при пересечении «положительного луча оси x» возрастает, а «отрицательного» – убывает.
Значит, движение по фазовым траекториям правее прямой точек покоя будет снизу вверх, а левее – сверху вниз.