




 .
.
Угол  требуется отложить из точки А от вектора ускорения
требуется отложить из точки А от вектора ускорения  в сторону
в сторону  , проводим из точки А луч АК (см. рис.36).
, проводим из точки А луч АК (см. рис.36).
Численное значение отрезка AQ составит
 см.
см.
Откладываем отрезок AQ на линии луча АК в масштабе построенной схемы.
Точка Q представляет собой МЦУ звена АВ.
5.2.2. Определим ускорение точки В ( ).
).
 Поскольку ускорение точки В определяется как вращательное относительно МЦУ звена АВ (точка Q), то численное значение ускорения составит (отрезок
Поскольку ускорение точки В определяется как вращательное относительно МЦУ звена АВ (точка Q), то численное значение ускорения составит (отрезок  замеряем в масштабе построенной схемы,
замеряем в масштабе построенной схемы,  см)
см)
 Для графического изображения вектора в точке В (см. рис.36) необходимо от отрезка отложить угол
Для графического изображения вектора в точке В (см. рис.36) необходимо от отрезка отложить угол  (который изображается с той же стороны, что и для точки А с отрезком
(который изображается с той же стороны, что и для точки А с отрезком  ) в направлении полученного луча из точки В направлен вектор ускорения точки .
) в направлении полученного луча из точки В направлен вектор ускорения точки .
5.2.3. Определим ускорение точки М ( ).
).
|
 равен 70,52 см)
равен 70,52 см)
 см/с2.
см/с2.
Для графического изображения вектора в точке М (см. рис.36) необходимо от отрезка отложить угол  (который изображается с той же стороны, что и для точки А с отрезком ), в направлении полученного луча из точки M направлен вектор ускорения точки .
(который изображается с той же стороны, что и для точки А с отрезком ), в направлении полученного луча из точки M направлен вектор ускорения точки .
6. Проверка допустимости приведенных расчетов ускорений многозвенного механизма методами плана и МЦУ
Таблица 4.
| Сравниваемая величина | По методу плана | По методу МЦУ | Процент расхождения,

|
| аB | 72,9 | 75,6 | 3,6% |
| аМ | 105,8 | 1,7% |
Если расхождение сравниваемых величин не превышает 5%, то приведенное решение считается верным.
Практическая работа 3
Определение скорости и ускорения точек плоского механизма.
Исходные данные:  с-1,
с-1,  с-2,
с-2,  см,
см,  см,
см, 

Рис. 37.
Определить скорости и ускорения точек А, В и угловую скорость и угловое ускорение вращения колеса (рис. 37).
Решение.
1. Определим скорости точек А и В плоского механизма, угловой скорости колеса.
1.1. Определим скорость точки А.
Точка А принадлежит звену АО, совершающего вращательное движение относительно неподвижной точки О. Численное значение скорости точки А определим по формуле
 см/с.
см/с.
Вектор скорости точки А  направлен перпендикулярно радиусу АО в сторону вращения угловой скорости
направлен перпендикулярно радиусу АО в сторону вращения угловой скорости  (рис.38).
(рис.38).
1.2.Определим угловую скорость колеса (диска).
 Мгновенный центр скоростей (МЦС) диска точка Р расположен в точке соприкосновения колеса с неподвижной поверхностью, по которой перекатывается колесо (рис.38).
Мгновенный центр скоростей (МЦС) диска точка Р расположен в точке соприкосновения колеса с неподвижной поверхностью, по которой перекатывается колесо (рис.38).
Под действием вектора скорости точки А колесо приобретает угловую скорость ( ) относительно неподвижной точки Р, направленную против часовой стрелки (рис.38). Численное значение угловой скорости колеса составит
) относительно неподвижной точки Р, направленную против часовой стрелки (рис.38). Численное значение угловой скорости колеса составит
 ,
,
где  – радиус вращения точки А относительно МЦС колеса точки Р, РА=АВ,
– радиус вращения точки А относительно МЦС колеса точки Р, РА=АВ,
|
 с-1.
с-1.
1.3.Определим скорость точки В.
Точка В принадлежит колесу, которое совершает вращательное движение относительно МЦС, точки Р. Скорость точки В составит
 ,
,
 где
где  – радиус вращения точки В относительно МЦС колеса точки Р, для нахождения данного отрезка рассмотрим вспомогательный треугольник ВАР (рис. 39).
– радиус вращения точки В относительно МЦС колеса точки Р, для нахождения данного отрезка рассмотрим вспомогательный треугольник ВАР (рис. 39).
|
), тогда в прямоугольном треугольнике ВСА угол ВАС будет равен  , так как АС является биссектрисой угла ВАР.
, так как АС является биссектрисой угла ВАР.
Определим ВС  см.
см.
Так как треугольники ВСА и САР подобны, то ВР = 2 ВС = 20 см
 см/с.
см/с.
Вектор скорости точки В ( ) направлен перпендикулярно ВР в сторону вращения угловой скорости
) направлен перпендикулярно ВР в сторону вращения угловой скорости  (рис.38).
(рис.38).
2. Определим ускорения точек А, В и угловое ускорение колеса.
2.1. Определим ускорение точки А.
Точка А принадлежит звену АО, совершающему вращательное движение относительно неподвижной точки О, тогда вектор ускорения точки равен векторной сумме вектора нормального (центростремительного) и касательного (вращательного) ускорений
 ,
,
где  – вектор нормального ускорения точки А на звене АО;
– вектор нормального ускорения точки А на звене АО;
 – вектор касательного ускорения точки А на звене АО.
– вектор касательного ускорения точки А на звене АО.
Численное значение нормального ускорения точки А составит
 см/с2.
см/с2.
Вектор направлен из точки А, к центру вращения точке О.
Численное значение касательного ускорения точки А составит

 см/с2.
см/с2.
Вектор направлен из точки А перпендикулярно АО в сторону вращения углового ускорения  (рис. 40).
(рис. 40).
Векторная сумма векторов и даст графическое изображение вектора ускорения точки А.
|
и взаимно перпендикулярны, то численное значение ускорения точки А определится по теореме Пифагора
 см/с2.
см/с2.
2.2. Определим угловое ускорение колеса.
Поскольку угловая скорость колеса равна  , где РА =constи ОА =const, то угловое ускорение колеса будет равно
, где РА =constи ОА =const, то угловое ускорение колеса будет равно


 с-2.
с-2.
Так как в данный момент времени угловая скорость и угловое ускорение звена ОА соноправлены (движение ускоренное), то и колесо будет находиться в ускоренном движении  .
.
2.3. Определим ускорение точки В.
Для нахождения ускорения точки В примем за полюс ускорение точки А, тогда составим векторное уравнение ускорений
 ,
,
где  – вектор нормального ускорения точки В относительно полюса точки А;
– вектор нормального ускорения точки В относительно полюса точки А;
 – вектор касательного ускорения точки В относительно полюса точки А.
– вектор касательного ускорения точки В относительно полюса точки А.
Численное значение нормального ускорения составит
 см/с2.
см/с2.
Вектор направлен из точки В к центру вращения точки А (см. рис. 40).
Численное значение касательного ускорения составит
 см/с2.
см/с2.
 Вектор направлен из точки А перпендикулярно АВ в сторону вращения углового ускорения
Вектор направлен из точки А перпендикулярно АВ в сторону вращения углового ускорения  (см. рис. 40).
(см. рис. 40).
Поскольку известны все составляющие векторного равенства (правой части уравнения), как по модулю, так и по направлению, то определим ускорение точки В путем проекций на координатные оси х и у векторного равенства ускорений.
Ускорение точки В в проекции на ось х
 ,
,
|
|
 Ускорение точки В в проекции на ось у
Ускорение точки В в проекции на ось у
 ,
,
 см/с2.
см/с2.
Численное значение ускорения точки В составит
 см/с2.
см/с2.
Для изображения вектора ускорения точки В сложим геометрически составляющие векторного равенства в правой части и укажем на схеме механизма в соответствующем масштабе (рис. 41).
Сложное движение точки
3.7.1. Абсолютное, относительное и переносное движение точки
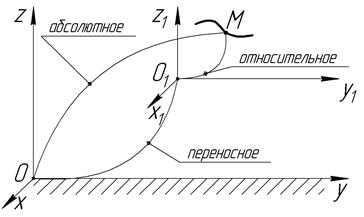 В ряде случаев возникает необходимость рассматривать движение точек одновременно по отношению к двум системам отсчета, одна из которых принимается за неподвижную, а вторая определенным обра-зом движется по отношению к первой. Движение точки в этом случае называется сложным.
В ряде случаев возникает необходимость рассматривать движение точек одновременно по отношению к двум системам отсчета, одна из которых принимается за неподвижную, а вторая определенным обра-зом движется по отношению к первой. Движение точки в этом случае называется сложным.
|
 ), относительной скоростью (
), относительной скоростью ( ), относительным ускорением (
), относительным ускорением ( ).
).
Движение подвижной системы отсчета О1х1у1z1 по отношению к неподвижной системе отсчета Охуz, называется переносным. Траектория, скорость, ускорение точки М в подвижной системе отсчета О1х1у1z1 относительно неподвижной Охуz, называется переносной траекторией ( ), переносной скоростью (
), переносной скоростью ( ), переносным ускорением (
), переносным ускорением ( ).
).
Движение точки М по отношению к неподвижной системе отсчета, называется абсолютным. Траектория, скорость и ускорение в этом движении называется абсолютной траекторией ( ), абсолютной скоростью (
), абсолютной скоростью ( ), абсолютным ускорением (
), абсолютным ускорением ( ).
).
Абсолютное движение точки М является сложным и состоит из относительного и переносного движений.

