




3.5.1. Метод полюса
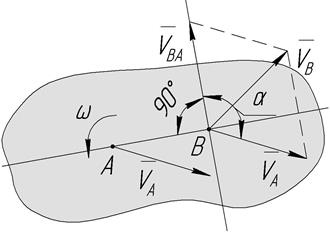
Поскольку движение плоской фигуры можно рассматривать как составное из поступательного, когда все точки фигуры движутся так же, как полюс А со скоростью  , и вращательного движения вокруг полюса, то скорость любой точки В фигуры определим векторной суммой скоростей (рис.23).
, и вращательного движения вокруг полюса, то скорость любой точки В фигуры определим векторной суммой скоростей (рис.23).
 , (65)
, (65)
где - скорость полюса точки А;
 - скорость точки В при вращении фигуры вокруг полюса точки А (если считать его неподвижным) численно равна
- скорость точки В при вращении фигуры вокруг полюса точки А (если считать его неподвижным) численно равна
 . (66)
. (66)
Вектор скорости направлен из точки В перпендикулярно ВА в сторону вращения угловой скорости  (рис.23).
(рис.23).
Численное значение скорости точки В определим по теореме косинусов
 , (67)
, (67)
где  – угол между векторами и , Î
– угол между векторами и , Î  .
.
|
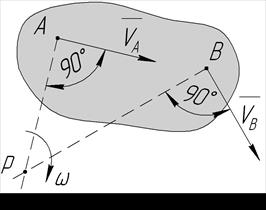
Свойство проекций скоростей точек плоской фигуры (теорема): проекции скоростей двух точек плоской фигуры на ось, проходящую через эти точки, равны.
Это свойство отображается следующим равенством, при проецировании и  на прямую АВ (рис.24)
на прямую АВ (рис.24)
 . (68)
. (68)
|

Равенство проекций является следствием неизменности расстояния между точками А и В, принадлежащими твердому телу, поэтому равенство будет справедливо для любого движения твердого тела.
3.5.2. Метод мгновенного центра скоростей (МЦС)
Мгновенным центром скоростей называется точка Р плоской фигуры, скорость которой в данный момент времени равна нулю. Скорости всех других точек плоской фигуры в данный момент времени определяются так, как если бы движение фигуры было вращательным относительно точки Р (рис.25).
|
Согласно метода полюса скорость точки В будет равна
 . (69)
. (69)
Так как скорость полюса (МЦС) точки Р равна нулю ( ), то
), то
 . (70)
. (70)
Вектор скорости  направлен из точки В перпендикулярно ВР в сторону вращения угловой скорости w.
направлен из точки В перпендикулярно ВР в сторону вращения угловой скорости w.
Аналогичное равенство можно представить для всех точек плоской фигуры, таким образом, скорости точек плоской фигуры пропорциональны их расстояниям до МЦС.
Для определения положения (МЦС) плоской фигуры, требуется знать направление линий, вдоль которых действуют вектора скоростей точек А и В ( и ). МЦС для данной фигуры будет находиться в точке пересечения перпендикуляров восстановленных к данным линиям.
Для нахождения скорости точки В, согласно рис.25, требуется знать скорость точки А. Тогда угловая скорость движения фигуры в данный момент времени составит
 , (71)
, (71)
где АР – расстояние точки А до точки Р, определяется согласно исходным данным.
Угловая скорость под действием скорости относительно полюса точки Р направлена по часовой стрелке.
Скорость точки В в данный момент времени составит
 . (72)
. (72)
Вектор скорости точки В () направлен перпендикулярно линии РВ в сторону вращения угловой скорости w (рис.25).
3.5.2.1. Понятие о центроидах
Траектория, которую описывает МЦС вместе с подвижной фигурой, называется подвижной центроидой (пример, при движении колеса по поверхности без скольжения (табл.2) подвижной центроидой является внешняя окружность колеса).
Геометрическое место МЦС, положений точки Р на неподвижной плоскости, называют неподвижной центроидой (при движении колеса по поверхности без скольжения (см. табл.2) неподвижной центроидой является неподвижная поверхность, по которой катится колесо).
3.5.2.2. Частные случаи МЦС
Таблица 2.
| Мгновенно-поступательное движение звена АВ | Движение колеса по поверхности (без скольжения) | Движение подвижного блока |

| 
| 
|
Точка В движется по прямой х-х, следовательно, скорость VB направлена вдоль оси, проводим перпендикуляр к оси х-х. Поскольку перпендикулярные линии не пересекаются, то звено АВ находится в мгновенно-поступательном движении, скорости всех точек этого звена равны, МЦС находится в бесконечности,  . .
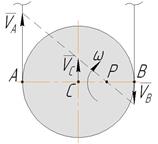
| МЦС находится в точке касания колеса с неподвижной поверхностью, по- которой катится колесо, точке Р.
Угловая скорость колеса, составит  .
Скорости точек В, С .
Скорости точек В, С


| МЦС (точка Р) находится в точке пересечения отрезка АВ и прямой, проходящей через концы векторов и . Определение положения точки Р
 .
Угловая скорость блока .
Угловая скорость блока


|

| 
| 
|

