




Основные понятия теории механизмов и машин
(машина, механизм, звено, кинематическая пара,
Высшие и низшие пары)
Машина состоит из трех основных частей - двигателя, передаточного механизма иисполнительного органа. Передаточный механизм служит для преобразования вида движения, изменения величины и направления скорости исполнительного органа. Передаточные механизмы машин и приборов имеют одинаковые для всех механизмов или определенных групп признаки, что дает возможность разработать общие методы их исследования и проектирования. С точки зрения кинематики безразлично, исследуется ли механизм двигателя внутреннего сгорания или отсчетного устройства манометрического прибора, если у них одинаковые кинематические схемы. Несмотря на различное назначение этих двух объектов и полную несхожесть их внешнего вида, в основе лежит один и тот же кривошипно-ползунный механизм. Методы кинематического исследования этих механизмов одинаковы.
Подвижно соединенные между собой части механизма называются звеньями. В механизме различают неподвижное звено-стойку (станина, корпус, шасси и т.д.) и подвижные звенья, которые могут совершать вращательное, поступательное и сложное движение. Звеном может быть одна или несколько жестко связанных между собой деталей.


а) в)
б)
Рис. 1.1. Механизм шарнирного четырехзвенника
а) четырехзвенник; б) кривошипный механизм; в) кулисный механизм
В зависимости от характера движения и назначения звенья имеют определенные названия. На рис. 1.1: звено 1 - кривошип; звено 2, совершаются сложное плоско-параллельное движение - шатуном; звено 3, совершающее качательное движение - коромыслом; неподвижное звено 4 является стойкой.
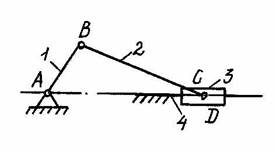
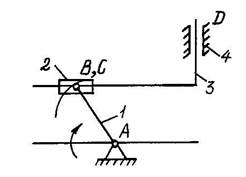
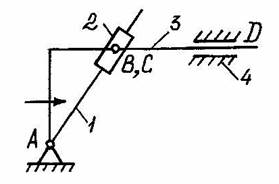
Кулисные механизмы, в состав которых входят два ползуна, образуют тангенсные и синусные механизмы (рис. 1.2)
|
а) б)
Рис. 1.2. Тангенсный (а) и синусный (б) механизмы
Широкое применение в технике нашли также кулачковые механизмы, отличающиеся большим разнообразием кулачков, фрикционные и зубчатые механизмы.
Механизм является кинематической цепью, отличающейся определенностью движения всех звеньев относительно неподвижного звена - стойки. Звенья, на которые действуют движущие силы, называются ведущими, остальные - ведомыми. Следовательно, механизмом называется кинематическая цепь, у которой при заданном движении одного или нескольких звеньев относительно звена, принятого за стойку, остальные звенья совершают вполне определенные движения.
При кинематическом исследовании механизмов иногда удобнее движение задавать не ведущим звеньям, на которые действуют движущие силы, а другим. В этом случае такие звенья называются входными; последнее звено в кинематической цепи, движение которого является производным от положения входного звена, называется выходным.
Соединение двух звеньев, обеспечивающее определенное относительное движение, образует кинематическую пару. Элементами кинематической пары называются поверхности, линии или точки, по которым происходит подвижное соединение двух звеньев и которые ограничивают относительное движение этих звеньев. В зависимости от вида элементов различают высшие и низшие кинематические пары. В высших кинематических парах элементами являются линии или точки. Кинематические пары, образованные элементами в виде поверхностей, называются низшими. Замыкание кинематических пар может быть геометрическим и силовым (пружина).

