




Под позиционными задачами следует понимать определение взаимного положения элементов: параллельны, пересекаются, принадлежат, не имеют общих точек и т.д.
Под метрическими задачами следует понимать измерение расстояний и углов между элементами, а также определение внутренних размеров элементов: длин, углов, площадей и т.д.
Пример: Построить прямую f, которая пересекает прямые m, n, e (рис. 41).
47
Если 3 точки принадлежат одной прямой, то они лежат в одной плоскости. Составим систему уравнений:
 D(e,R) - плоскость, заданная одной из прямых e и произвольной точкой R
D(e,R) - плоскость, заданная одной из прямых e и произвольной точкой R
n - вторая заданная прямая
m - третья заданная прямая
Для решения этой системы составим 2 системы уравнений:
 D(e,R) Решив систему, определим точку В, которая будет принадлежать
D(e,R) Решив систему, определим точку В, которая будет принадлежать
n прямой f.
 D(e,R) Решив систему, определим точку A, которая будет принадлежать
D(e,R) Решив систему, определим точку A, которая будет принадлежать
m прямой f.
Точки А и В определят прямую f, после чего останется решить систему:
 f (А,В) После решения этой системы уравнений определим точку С,
f (А,В) После решения этой системы уравнений определим точку С,
e в которой прямая f пересекает прямую e.
Графическое решение задачи:
- Точку R(R1,R2) взяли исходя из условия, что проекции прямых m и n пересекают проекцию плоскости D(RGQ). Точки G(G1, G2) и Q(Q1, Q2) на прямой е взяли произвольно.
 - Известным способом нашли точку пересечения А(А1,А2) прямой m(m1, m2) с плоскостью D(RGQ) (в плоскости D(RGQ) взяли прямую d, фронтальная проекця d2 которой совпадает с фронтальной проек-цией m2, пересечение горизонталь-ных проекций определит горизон-тальную проекцию А1, А2 - на пересечении линии связи с m2).
- Известным способом нашли точку пересечения А(А1,А2) прямой m(m1, m2) с плоскостью D(RGQ) (в плоскости D(RGQ) взяли прямую d, фронтальная проекця d2 которой совпадает с фронтальной проек-цией m2, пересечение горизонталь-ных проекций определит горизон-тальную проекцию А1, А2 - на пересечении линии связи с m2).
- Тем же способом определили точку пересечения В(В1,В2) прямой
Рис. 41 n(n1, n2) с плоскостью D(RGQ).
- Две точки А и В задают прямую f(f1,f2). f1(А1, В1), f2(А2,В2).
- Прямые f и е расположены в плоскости D и пересекаются в точке С(С1,С2).
 |
Пример: Через точку А провести отрезок АВ длиной 40 мм, который перпендикулярен прямой t и наклонен к плоскости П1 под углом 25° (рис. 42)
Рис.42
Отрезок АВ принадлежит плоскости D, которая проходит через точку А и перпендикулярна прямой t. Такую плоскость можно задать пересекающимися в точке А прямыми h(h1^t1, h2÷÷ Х12) перпендикулярна t(t1, t2) и f(f1÷÷ Х12, f 2 ^ t2) перпендикулярна t(t1, t2).
Далее следует выяснить максимальный угол наклона прямых плоскости D к П1. Он равен углу наклона плоскости D к плоскости П1. Если amax > 25°, то отрезок АВ в плоскости D можно построить.
В положении 1 изменен угол b плоскости D(h, f) до 90°, т.к. h ^ П2 (h11 перпендикулярна оси Х12, Н12 – точка. Угол a плоскости D равен
56,8° больше 25°, следовательно, условие задачи можно выполнить.
Далее через точку А1 построим отрезок А1В1(А11В11, А12В12) c углами b=0, a=25° и длиной 40 мм. Этот отрезок не принадлежит плоскости D, поэтому следует ввести точку В в плоскость без изменения координаты Z, для чего повернем ее вокруг оси iZ ^ П1 (см. рис. 3, iZ проходит через А1). Горизонтальная проекция траектории точки В1 - окружность r1 радиусом R=А11В11. Фронтальная проекция дуги r2 - прямая Z = Z В.
Если точка В2 принадлежит плоскости D, то ее фронтальная проекция В22 принадлежит ее фронтальному следу D2, т. к. D ^ П2. Горизонтальная проекция В21 точки будет лежать на горизонтальной проекции дуги r1 и линии связи из В22 к оси Х.
Остается вернуть отрезок АВ в исходное положение:
- В положении 1 в плоскости D(h, f) провели прямую 12, пересекающую прямую А1В2 в точке 3. Сначала построена горизонтальная проекция 111211 и определена горизонтальная проекция 311 точки пересечения горизонтальных проекций прямых А1В2 и 1121.
- Построена фронтальная проекция 112212 и определена фронтальная проекция 312 точки 3.
- Определена фронтальная проекция 1222 прямой (12 расположена на f 2 и на линии связи к оси Z, 22 – на h2 и на линии связи к оси Z) и фронтальная проекция точки 32 (312 находится на пересечении 1222 и линии связи к оси Z).
- Определена горизонтальная проекция прямой 12 (11 расположена на f1 и на линии связи к оси Х, 21 – на h1 и на линии связи к оси Х).
- Горизонтальная проекция точки 31 находится на пересечении 1121 и линии связи к оси Х).
- Фронтальная проекция В2 находится на пересечении на пересечении линии связи к оси Z через В22 с продолжением фронтальной проекции прямой А232. Горизонтальная проекция В1 расположена в точке пересечения линии связи к оси Х через В2 с продолжением горизонтальной проекции прямой А131.
Отрезок АВ перпендикулярен прямой t, наклонен к плоскости П1 под углом 25° и имеет длину 40 мм.
Если проанализировать решение позиционной задачи 1 и позиционно-метрической задачи 2, то легко обнаружить общий подход к решению любой задачи. Он не отличается от известных математических методов решения систем уравнений, которые предполагают выражение одних неизвестных через другие и сокращение таким образом числа уравнений в системе.
Изменять положение объекта в пространстве можно другими способами преобразования чертежа.
На рис.30 определен угол j между фронтальным и горизонтальным следами плоскости D методом вращения вокруг линии уровня.
Линия уровня - прямая, параллельная одной из плоскостей проекций.
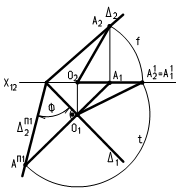 В данном случае вращение плоскости D до положения, параллельного П1, выполнено вокруг прямой D1, уравнение которой Z=0. Поскольку D1 Ì П1, то D будет совмещена с плоскостью П1.
В данном случае вращение плоскости D до положения, параллельного П1, выполнено вокруг прямой D1, уравнение которой Z=0. Поскольку D1 Ì П1, то D будет совмещена с плоскостью П1.
Центр вращения О точки А, принадлежащей D2, находится на перпендикуляре АО, опущенном из А к оси D1. На основании (9) А1О1 ^ (D1)1=D1. О2 находится на (D1)2 = Х12 и линии связи к оси Х из О1.
Рис.30 Если угол a наклона плоскости равен 0, то АП1О1= êАО ê. Для определения êАО ê изменена координата Z точки А до 0. Дугой f отложен отрезок О2А12 = О2А2. Дугой t отложен отрезок АП1О1 = О1А11 = êАО ê. АП1 - совмещенное с плоскостью П1 положение точки А. DП12 - совмещенное с плоскостью П1 положение следа D2. Угол j = (DП12)Ù(D1).
Выше изменение углов наклона объектов к плоскостям проекций выполнено вращением самих объектов.
Те же операции можно выполнять изменением положения плоскостей проекций - методом замены плоскостей проекций.
Такой метод предполагает ввод дополнительных плоскостей проекций, перпендикулярных одной из уже существующих на чертеже и расположенных под определенным углом к объекту.
Если принять, что все нечетные плоскости за исключением 3-ей - горизонтальные, все четные плоскости - фронтальные, 3-я плоскость - профильная, то координаты X, Y, Z определяются в соответствии с равенствами (5).
На рис. 31 определены угол наклона треугольника к плоскости П1 a и его натуральная величина.
Для определения угла a введена дополнительная фронтальная плоскость П4, которая ^ П1 и (АВС). Ось x 14 = П1 Ç П4. Она проведена ^ прямой АD, которая параллельна П1. Следовательно, на основании (10) A1D1 ^ x 14. Поскольку координаты Z точек А, В, С не изменялись, т.е. горизонтальная плоскость П1 и треугольник АВС не меняли взаимного положения, то проекции точек А, В, С на плоскость П4 расположены на линиях связи к оси x 14 и удалены от последней на величину прежних координат Z, т.е. ç x 14A4ç=ç x 12A2ç, ç x 14B4ç=ç x 12B2ç, ç x 14C4ç=ç x 12C2ç.
В новой системе координат, заданной плоскостями П1 Ç П4, YA = ç x 14A1ç, YB = ç x 14B1ç, YC = ç x 14C1ç.
Проекция треугольника (А4 В4 С4) - линия пересечения (АВС) с плоскостью проекций П4.
Угол наклона треугольника (АВС) к плоскости проекций П1 a = x 14 Ù(А4В4С4).
Для определения натуральной величины треугольника (АВС) введена дополнительная горизонтальная плоскость П5 ^ П4 и параллельная (АВС). Ось x 45 параллельна (А4В4С4), т.е. координаты Z точек А, В и С равны ZA=ç x 45A4ç, ZВ=ç x 45В4ç, ZС=ç x 45С4ç.
Положение треугольника (АВС) по отношению к плоскости П4 не изменилось. Следовательно, горизонтальные проекции точек А5, В5, С5 расположены на линиях связи к оси x 45, проходящих через фронтальные проекции А4, В4, С4, и удалены от оси x 45 на величину предыдущих координат Y:
ç x 14A1ç=ç x 45A5ç, ç x 14B1ç=ç x 45B5ç, ç x 14C1ç=ç x 45C5ç.
Проекция (А5В5С5) = çАВСç.

Рис. 31
Способ замены плоскостей проекций прост для понимания и удобен при ручном исполнении чертежа, но в машинном исполнении потребуется оператор преобразования осей координат, который отсутствует в большинстве графических пакетов.
Если проанализировать решение позиционной задачи 1 и позиционно-метрической задачи 2, то легко обнаружить общий подход к решению любой задачи. Он не отличается от известных математических методов решения систем уравнений, которые предполагают выражение одних неизвестных через другие и сокращение таким образом числа уравнений в системе.