




Приняв прямую за единственный элемент для моделирования трехмерного пространства, можно тремя пересекающимися в одной точке и не лежащими в одной плоскости прямыми образовать трехмерное пространство, обеспечивая измерение в трех направлениях.
В прямоугольной системе координат три прямые x, y и z взаимно перпендикулярны и пересекаются в одной точке БТ, которая совпадает с началом координат 0 (рис. 3).
Для работы в системе необходим аппарат, который позволял бы определять и изменять положение объекта в этом пространстве, т.е. измерять и изменять расстояния и углы.
Если принять точку А за базу параллепипеда S, то положение его в пространстве можно определить расстояниями базы А до плоскостей П1, П2, П3 и углами наклона граней к тем же плоскостям.
Прямые ix, iY и iz образуют внутреннюю прямоугольную систему координат объекта Σ с началом в точке А. Внутреннюю систему координат объекта можно вращать вокруг ее осей вместе с объектом. При этом будут меняться углы наклона граней объекта к П1, П2, П3.
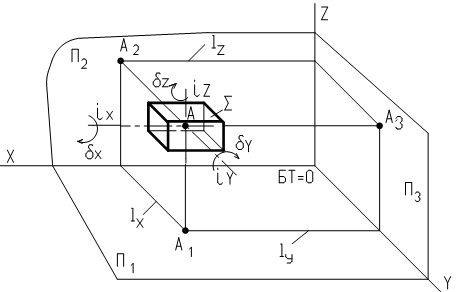 |
Рис. 3. Σ – объект; ix ^ П3; iY^ П2; iz ^ П 1; dх, dY; dz – направления вращения
Представленная на рис.3 объемная модель трехмерного пространства наглядна, но трудоемка в исполнении и на ней искажены расстояния и углы. Поэтому в конструкторской документации используется плоская модель, которая исключает указанные недостатки.
Для формирования модели введем определения:
- точка A - пересечение двух линий, обозначается
прописной буквой латинского алфавита; (1)
- плоскость Σ - две пересекающиеся прямые, обозначается
прописной буквой греческого алфавита; (2)
- отрезок (AB) – участок прямой между двумя точками. (3)
В соответствии с определением (2):
- прямые x и y образуют горизонтальную плоскость П1 (рис. 4а);
- прямые x и z образуют фронтальную плоскость П2 (рис. 4б);
- прямые y и z образуют профильную плоскость П3 (рис. 4 в).
Плоскости П1, П2, П3 называются основными плоскостями проекций, т.е. на них будем изображать расположенный в пространстве объект, например, точку А. При этом объект находится между наблюдателем и плоскостью проекций.
Изображение объекта на плоскость - проекция объекта, обозначается именем объекта с индексом плоскости, на которой он изображен. А1 - горизонтальная проекция точки А, А2 - фронтальная, А3 - профильная.
Чтобы получить проекцию точки, достаточно из нее опустить перпендикуляр на плоскость. Точка пересечения перпендикуляра с плоскостью - проекция точки на соответствующую плоскость.
После дополнения первоначальной модели трехмерного пространства тремя плоскостями П1, П2 и П3 положение точки в пространстве будет определено расстояниями до плоскостей проекций:
½ АП2½ = ½ АА2½ - длина;
½ АП3½ = ½ АА3½ - ширина; (4)
½ АП1½ = ½ АА1½ - высота.
В математике уравнение точки А(X, Y, Z), где X, Y, Z - координаты, в нашей модели длины отрезков, измеренные от БТ вдоль координатных осей x, y и z.
Чтобы совместить равенства (4) c координатами, введем понятие линии связи. Это ломаная линия, соединяющая две проекции одной точки, лежащая в плоскостях проекций и перпендикулярная одной из осей x, y, z. Обозначается латинской буквой l с индексом оси, к которой она перпендикулярна. На рис. 3 lx - линия связи к оси x, l y - к оси y, lZ - к оси z.
Тогда, если обозначить начало координат 0, равенства (4) можно расширить:
½АП1½ = ½АА1½ = ½ A2X ½ = ½A3Y½ = ½0 l Z½ = Z
½АП2½ = ½AA2½ = ½ A1X ½ = ½A3Z½ = ½0 l Y½ = Y (5)
½АП3½ = ½AA3½ = ½A1Y½ = ½A2Z½ = ½ 0 l X ½ = X
Cледовательно, положение точки в пространстве может быть определено не только расстояниями до плоскостей проекций, но и отрезками по осям x, y, z от 0 до линии связи: ½0 l X½ = X; ½0 l Y½ = Y; ½0 l Z½ = Z, а также отрезками линий связи от проекции точки до соответствующей оси (½A1Y1½ = Х; ½А2 х 12½ = Z; ½A1 x 12½ = Y).
Каждая плоскость П1, П2 и П3 может быть изображена на чертеже как две пересекающиеся оси (рис. 4).
 Индексы 1, 2, 3 у осей x, y, z определяют принадлежность к соответствующей плоскости проекций П1, П2, П3.
Индексы 1, 2, 3 у осей x, y, z определяют принадлежность к соответствующей плоскости проекций П1, П2, П3.
Рис.4. a - горизонтальная плоскость П1; б - фронтальная плоскость П2;
в - профильная плоскость П3.
 Если три изображения рис. 4 совместить (наложить одно на другое), то получим плоскую модель прямоугольной системы координат (рис. 5).
Если три изображения рис. 4 совместить (наложить одно на другое), то получим плоскую модель прямоугольной системы координат (рис. 5).
Оси x, y и z для различных плоскостей проекций совпадают, но отличаются линейным или угловым направлением.
Такая модель не имеет объема, следовательно, в ней не может быть изображен сам объект. Изображается только то, что расположено в плоскости проекций: проекции объекта и линии связи.
В математической модели трехмерного пространства точка задана уравнением A(X, Y, Z), где X, Y, Z - координаты точки соответствуют длинам отрезков Х = n,
Рис. 5 Y=k, Z=m (рис. 5).
Уравнения проекций точки A: A1(X,Y); A2(X,Z); A3(Y,Z). Тогда горизонтальная проекция A1 и фронтальная проекция A2 имеют одну и ту же координату X, т.е. они принадлежат множеству точек X = n. По определению выше - это линия связи к оси x (lx). Она удалена от 0 на величину n и перпендикулярна оси X.
По аналогии можно утверждать, что фронтальная проекция A2 и профильная A3 принадлежат линии связи к оси z (lz), которая задана уравнением Z = m, а A1
и A3 принадлежат линии связи к оси y (lY), которая задана уравнением Y = k.
В реальной системе координат y 1 и y 3 одна и та же ось y, а в плоской модели y 1 и y 3 имеют различное угловое направление, то линия связи также разделена на 2 части l y1 (расположена на плоскости П1) и l y3 (расположена на плоскости П3). При этом расстояние от начала отсчета вдоль оси y для обеих ветвей одинаково и равно k.
Дуга t означает, что расстояние k, отложенное по оси y 1 с некоторой степенью точности, перенесено на ось y 3 c той же погрешностью. Дуга t не принадлежит линии связи и ее можно заменить прямой под углом 45°. В обеих случаях точка пересечения l y1 с осью y 1 будет перенесена на ось y 3, через эту точку пройдет линия связиl y3 к оси y 3.
Проекции точки A1, A2, A3 будут находиться на пересечении соответствующих линий связи, что соответствует определению точки (1).
Пример: Построить точку В(-20, -15, 25).
Построить точку - значит построить ее проекции в прямоугольной системе координат В(В1, В2, В3).
 Если горизонтальная и фронтальная проекции имеют одинаковую координату х, то они лежат на одной линии связи к оси x (рис. 6). Для построения точки отложим по оси x координату X = -20 и проведем lX. Используя равенства (5), отложим на линии связи расстояние ½ x 12В2½ = Z = 25, получим фронтальную проекцию В2. На той же линии связи отложим расстояние ½ x 12В1½ = Y = -15, получим горизонтальную проекцию В1.
Если горизонтальная и фронтальная проекции имеют одинаковую координату х, то они лежат на одной линии связи к оси x (рис. 6). Для построения точки отложим по оси x координату X = -20 и проведем lX. Используя равенства (5), отложим на линии связи расстояние ½ x 12В2½ = Z = 25, получим фронтальную проекцию В2. На той же линии связи отложим расстояние ½ x 12В1½ = Y = -15, получим горизонтальную проекцию В1.
Профильную проекцию В3 следует получить на пересечении линий связи к осям z и y (l Z Ç l y3 ), т. к. измерение одной и той же величины следует вести один раз, чтобы избежать
повторной погрешности измерения
Рис. 6 координат Z и Y.
Если заданы проекции точки, то положение ее в реальном пространстве, например, в комнате, где расположен наблюдатель, можно описать следующим образом:
- поскольку координата X отрицательная, то точка находится за боковой стеной;
- поскольку координата Y отрицательная, то точка находится за фронтальной стеной;
- поскольку Z положительная, то точка находится над полом.

Положение объекта в пространстве определено, если есть проекции его на 2 плоскости, например, П1 и П2 (рис. 7), т.е. известны координаты X = ½0 lX ½, Y = ½C1 x 12½, Z = ½C2 x 12½.
Рис. 7
Прямая линия
Прямая в прямоугольной системе координат задается положением ее текущей базы, например, точкой A(X, Y, Z) и углами наклона к плоскостям проекций a к П1, b к П2, g к П3 (рис. 8).
Угол наклона прямой к плоскости измеряется между
самой прямой и ее проекцией на эту плоскость (6)
Под самой прямой на плоской модели будем подразумевать проекцию, длина которой равна модулю. (7)
На основании (6): угол a = (MN)^(M1N1);
угол b = (MN)^(N2M2);
угол g = (MN)^(M3N3).
В прямоугольном треугольнике АВ0В катет АВ0 равен длине горизонтальной проекции А1В1, катет ВВ0 равен разности координат ½ZA-ZB½.
Отсюда:
- длина горизонтальной проекции A1B1 = AB ´ Cos(a);
- угол наклона к плоскости П1 a = arctg(½ZA - ZB½ / A1B1). (8)
Управляющим параметром для изменения угла наклона прямой a является разность координат Z концов отрезка. Следствием изменения a будет изменение длины горизонтальной проекции.
Если рассмотреть аналогичные треугольники для углов b и g, то:
- длина фронтальной проекции A2B2 = AB ´ Cos(b)
- угол наклона к плоскости П2 b = arctg(½YA - YB½ / A2B2) (9)
Управляющим параметром для изменения угла наклона прямой b является разность координат Y концов отрезка. Следствием изменения b будет изменение длины фронтальной проекции.
- длина профильной проекции A3B3 = AB ´ Cos(g)
- угол наклона к плоскости П3 g = arctg(½XA - XB½ / A3B3) (10)
Управляющим параметром для изменения угла наклона прямой g является разность координат Х концов отрезка. Следствием изменения g будет изменение длины профильной проекции.

Рис. 8
Если a = 0, то горизонтальная проекция А1В1=½АВ½ и может быть принята за длину прямой.
Если b = 0, то фронтальной проекция А2В2 =½АВ½ и может быть принята за длину прямой.
Если g = 0, то профильной проекция А3В3=½АВ½ и может быть принята за длину прямой.
В плоской модели прямая задана проекциями (рис. 9).
 |
Рис.9
Проекции заданы линейными уравнениями на плоскостях П1, П2 и П3:
Y = K1 · X + C1 - горизонтальная проекция А1В1; (11)
Z = K2 · X + C2 - фронтальная проекция А2В2; (12)
Z = K3 · Y + C3 - профильная проекция А3В3, (13)
где:
K1=tq(j1); K2=tq(j2); K3=tq(j3); С1 - координата Y точки A; C2 = C3 - координата Z точки A.
Следовательно, в плоской модели задано положение текущей базы прямой A(X, Y, Z), но отсутствуют углы a, b, g и модуль ½АВ½.
Линии пересекаются, если они расположены в одной плоскости. Следовательно, пересекаться могут только одноименные проекции: горизонтальные с горизонтальными, фронтальные с фронтальными, профильные с профильными.
На рис. 9 определены точки пересечения прямой АВ с плоскостями проекций – следы прямой. Горизонтальный след М – точка пересечения прямой с плоскостью П1. Она определена из условия, что координата Z точки
равна нулю (точка М принадлежит горизонтальной плоскости П1, все точки которой имеют координату Z =0). Если продолжить фронтальную проекцию A2B2 до пересечения с фронтальной проекцией оси Х, которая совпадает с осью Х12, то в результате будет получена фронтальная проекция точки М2.
Иначе – решена система линейных уравнений:
Z=Tg (j2)X + ZA (фронтальнаяпроекция A2B2)
Z=0 (фронтальная проекция оси Х).
В результате решения системы уравнений получена координата Х точки М.
Горизонтальная проекция М1 будет на пересечении линии связи к оси Х с продолжением горизонтальной проекции прямой А1В1. Иначе – решена система линейных уравнений:
Y=Tg (j1)X + YA(горизонтальнаяпроекция A1B1)
Х=ХМ(линия связи к оси Х через М2).
В результате решения системы уравнений получена координата Y точки М.
N – точка пересечения с плоскостью П2. Она определена из условия, что координата Y такой точки равна нулю, для чего горизонтальная проекция A1B1 продолжена до пересечения с горизонтальной проекцией оси Х, совпадающая с осью Х12. Точка пересечения - горизонтальная проекция точки N1.
Иначе – решена система линейных уравнений:
Y=Tg (j1)X + YA (горизонтальная проекция A1B1)
Y=0 (горизонтальная проекция оси Х).
В результате решения системы уравнений получена координата Х точки N.
Фронтальная проекция N2 будет на пересечении линии связи к оси Х и продолжении фронтальной проекции прямой А2В2. Иначе – решена система линейных уравнений:
Z=Tg (j2)X + ZA(фронтальнаяпроекция A2B2)
Х=ХN(линия связи к оси Х).
В результате решения системы уравнений получена координата Z точки М.
P – точка пересечения с плоскостью П3. Она определена из условия, что координата Х такой точки равна нулю (Рис. 8). Горизонтальная проекция Р1 находится на пересечении горизонтальной проекции прямой А1В1 и оси Y. Профильная проекция Р3 и совпадающая с ней Р находятся на пересечении профильной проекции А3В3 и линии связи к оси Y.
Обозначения: АВ – прямая в исходном положении; А1В1 – прямая в первом текущем положении; А2В2 - прямая во втором текущем положении и т. д.;
А1В1 – горизонтальная проекция прямой в исходном положении; А11В11 – то же в первом текущем положении; А21В21 – во втором текущем положении;
А2В2 – фронтальная проекция прямой в исходном положении; А12В12 – то же в первом текущем положении; А22В22 – во втором текущем положении и т. д.
Угол a наклона прямой к плоскости П1 (рис. 10) равен углу между фронтальной проекцией прямой АВ, если она равна ее натуральной величине, и горизонтальной проекцией. Для чего согласно (9) следует выравнять координаты Y точек А и В, что возможно, если j1=0, тогда YA = YB, как следствие: b=0, А22В22=½АВ½. С изменением угла b не меняются длина горизонтальной проекции (А21В21) = (A1B1) и координаты Z точек А и В, т.к. они не входят в формулы (9), на основании которых выполнено изменение угла b. Формально угол a измерен между А22В22=½АВ½ и горизонтальной прямой (А22 А2), параллельной А21В21.
 |
Рис. 10
В реальном трехмерном пространстве (согласно рис. 3) второе текущее положение прямой А2В2 получено:
- изменены координаты X и Y точки А без изменения координаты Z (в результате точка А переместилась влево и вперед по отношению к исходному положению, расстояние точки А до горизонтальной плоскости проекций не изменилось);
- горизонтальная проекция А1В1прямой АВ повернута по часовой стрелке вокруг оси iz на угол j1 (см. рис. 9), в результате АВ стала параллельна плоскости проекций П2.
Управляющим параметром изменения угла a является разность½ ZA - ZB½. Изменение разности координат Z ведет к изменению угла a.
Угол b наклона прямой к плоскости П2 (рис. 10) равен углу между горизонтальной проекцией прямой АВ, если она равна ее натуральной величине, и фронтальной проекцией. Для чего согласно (8) следует выравнять координаты Z точек А и В, что возможно, если j2=0, тогда ZA = ZB, как следствие: a=0, А11В11=½АВ½. С изменением угла a не меняются длина фронтальной проекции (А12В12) = (A2B2) и координаты Y точек А и В, т. к. они не входят в формулы (8), на основании которых выполнено изменение угла a. Формально угол b измерен между А11В11=½АВ½ и горизонтальной прямой (А11 А1), параллельной А12В12.
В реальном трехмерном пространстве (согласно рис. 3) первое текущее положение прямой А1В1 получено:
- изменены координаты X и Z точки А без изменения координаты Y (в результате точка А переместилась вправо и вниз по отношению к исходному положению, расстояние точки А до фронтальной плоскости проекций не изменилось);
- фронтальная проекция А2В2 прямой АВ повернута по часовой стрелке вокруг оси iY на угол j2 (см. рис. 9). В результате АВ стала параллельна плоскости проекций П1.
Управляющим параметром изменения угла b является разность½Y A -Y B½.
Изменение разности координат Y ведет к изменению угла b.
Пример. Увеличить угол наклона прямой CD к горизонтальной плоскости проекций на 22° и длину на 20 мм (рис. 11).
Изменять размер любого элемента можно при условии, что на чертеже он выполнен в натуральную величину. Поэтому:
1. В 1-ом текущем положении прямой C1D1(C11D11, C12D12) (запись означает, что прямая C1D1 задана горизонтальной и фронтальной проекциями) определим натуральную величину угла a = 12°.
2. На основании (8) при увеличении угла aуменьшается длина горизонтальной проекции С1D1, следовательно, максимальному значению угла aбудет соответствовать минимальная длина горизонтальной проекции С1D1. Увеличивать угол aв исходном положении прямой CD можно вращением ее вокруг оси iY (см. рис. 3), проходящей через точку С. Вращаться будет точка D. Траектория движения фронтальной проекции D2 – окружность h2, горизонтальная проекция h1 траектории движения D1 – прямая, заданная уравнением Y=YD.
Минимальная длина горизонтальной проекции прямой в положении CD7(C1D71, C2D72) равна (C1D71) = DY. Дальнейшее уменьшение длины приведет к изменению разности ½Y A -Y B½ и угла b, что не предусмотрено условиями решаемой задачи.
В результате определена координата Z = ZD7 точки D при aмаx. Траектория движения фронтальной проекции D12 – дуга t, следовательно, фронтальная проекция D22 при aмаx будет на пересечении дуги t и прямой D72D22, которая задана уравнением Z = ZD7(D72D22). aмаx = 47° измерен между (C12 D22) и прямой, заданной уравнением Z = ZС1 и параллельной (C11 D21). Длина горизонтальной проекции (C11 D21) = DY.
 |
После увеличения исходного угла a=12° на 22° суммарный угол 34° меньше aмаx = 47°.
Рис. 11
Для построения прямой CD после изменения угла проведем фронтальную ее проекцию через C12 под углом 34° до пересечения с дугой t в точке D32. В результате получим фронтальную проекцию (C12 D32). Горизонтальная проекция точки D31 находится на линии связи к оси Х и на горизонтальной
проекции прямой. В исходном положении фронтальная проекция D52 находится на пересечении фронтальной проекции дуги h2 и линии связи к оси Z через D32 (линейное уравнение Z=ZD3). Горизонтальная проекция D51 расположена на линии связи к оси Х и на горизонтальной проекции дуги h1.
Прямая C D5(C1D51, C2 D52) наклонена к плоскости П1 под углом 34°.
Контрольный размер – радиус дуги f, равный C1D51, на основании (8) равен C11 D31 т. к. aconst.
Чтобы увеличить длину CD на 20 мм, увеличим длину фронтальной проекции (C12 D32) = ½CD½. В результате получим фронтальную проекцию точки D42, горизонтальная проекция D41 будет расположена на пересечении горизонтальной проекции прямой с линией связи к оси Х. В исходном положении фронтальная проекция D62 находится на продолжении фронтальной проекции C2D52 и на линии связи к оси Z, проходящей через D42. Горизонтальная проекция D61 расположена на продолжении горизонтальной проекции C1D51 и на линии связи к оси Х.
Прямая C D6(C1D61, C2 D62) наклонена к плоскости П1 под углом 34° и ее длина увеличена на 20 мм.
Примечание: Любая проекция точки – результат решения системы двух уравнений.
Плоскость
В общем виде плоскость задана двумя пересекающимися прямыми (2). Если на этих прямых взять 3 точки, не лежащие на одной прямой, то плоскость будет задана тремя точками. Если 3 упомянутые точки соединить прямыми, то плоскость будет задана треугольником (плоской фигурой в том числе окружностью, проходящей через три точки). Если через точку на первой прямой провести прямую, параллельную второй прямой, то плоскость будет задана двумя параллельными прямыми.
На рис.12 и 13 плоскость Q задана следами Q1, Q2, Q3. След плоскости – линия пересечения плоскости с соответствующей плоскостью проекций.
Горизонтальный след Q1 расположен в плоскости П1 и имеет 3 проекции: горизонтальная проекция (Q1)1 совпадает с самой прямой Q1; фронтальная (Q1)2 совпадает с осью Х (линейное уравнение Z=0); профильная (Q1)3 совпадает с осью Y.
Фронтальный след Q2 расположен в плоскости П2 и имеет 3 проекции: фронтальная проекция (Q2)2 совпадает с самой прямой Q2; горизонтальная (Q2)1 совпадает с осью Х (линейное уравнение Y=0); профильная (Q1)3 совпадает с осью Z.
Профильный след Q3 расположен в плоскости П3 и имеет 3 проекции: профильная (Q3)3 совпадает с самой прямой Q3; фронтальная (Q3)2 совпадает с осью Z (линей
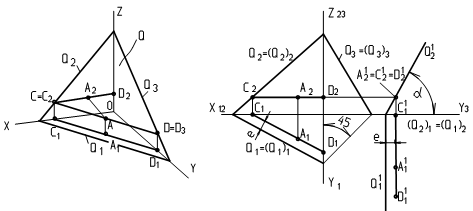 |
ное уравнение Х=0); горизонтальная (Q3)1 совпадает с осьюY. Точки пересечения следов расположены на соответствующих осях x,y и z .
Рис. 12 Рис. 13
В плоскости (рис. 12) изображена прямая СD, точка С принадлежит Q2, точка D принадлежит Q3. Угол a наклона прямой СD равен 0. C1D1 – горизонтальная проекция прямой, С2D2 – фронтальная.
Точка принадлежит плоскости, если она
принадлежит прямой, лежащей в этой плоскости (14)

