




Подробное знание принципа действия этих устройств значительно облегчит знакомство с другими представителями динамических преобразователей. Кроме того, тотальное распространение сделало их чуть ли не стандартной частью любого электроакустического комплекса.
Существует ложное мнение, будто при сжатии компрессором динамического диапазона повышается громкость передаваемого сигнала. Этот дополнительный эффект, о чём будет сказано ниже, вовсе не связан с внутренними качествами рассматриваемого автоматического регулятора, а зависит от способа его включения в электроакустический тракт и от выбора режима работы.
К собственно свойствам любого динамического регулятора, в частности, компрессора, относятся четыре характеристики:
1. Амплитудная (динамическая) характеристика.
2. Временная характеристика.
3. Частотная характеристика.
4. Сервисная характеристика.
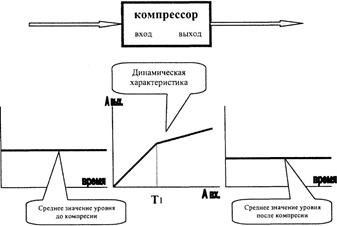
Амплитудная характеристика в технической документации может быть представлена двояко: как зависимость уровня выходного сигнала компрессора от уровня его входного сигнала (рис. 2-21) или как зависимость от уровня входного сигнала коэффициента его передачи (рис. 2-22). Для звукорежиссёра нет необходимости в подробных знаниях

|

|
схемотехники компрессоров, важно усвоить только, что функционирование прибора есть его реакция на величину входного сигнала.
Понимать графики 2-21 и 2-22 надо так. Пока уровень входного сигнала не превышает так называемого порога срабатывания (англ.: Threshold) компрессора (точкаТ, — в нашем конкретном случае — минус 6 дБ от номинального значения), коэффициент передачи прибора равен 1 (О дБ), и выходной сигнал от входного не отличается. Дальнейшее увеличение входного сигнала вызывает постепенное снижение коэффициента передачи, и выходной уровень достигает О дБ лишь при уровне входного сигнала в +12 дБ. Таким образом, диапазон входных уровней в 18 дБ (считая от точки срабатывания) сжимается в диапазон выходных уровней, равный всего 6 дБ.
Степень сжатия (англ.: Ratio) динамического диапазона, как и порог срабатывания компрессора являются его регулируемыми параметрами. Шкала установки порога срабатывания всегда градуируется в -дБ от номинального уровня, а степень сжатия может обозначаться по-разному:
• как отношение приращений входного и выходного сигна
лов в диапазоне выше точки срабатывания (в нашем при
мере— 18:6 (дБ);
• как то же отношение, написанное в абсолютных величи
нах (у нас — уровень входного сигнала изменился в во
семь раз, а выходного— вдвое, следовательно, степень
компрессии равна 4).
• как предыдущее число, выраженное в децибелах (в нашем
примере — 12 дБ).
Коэффициент передачи компрессора, согласно рис. 22, после перехода за точку срабатывания, постепенно уменьшается от 1 до 0,25.
Из динамической характеристики становится понятно, что компрессор сам по себе понижает уровень сигналов, превосходящих пороговое значение. В обиходе этот динамический эффект именуется «сжатием сверху». Чтобы получить ощущение прироста громкости, необходимо в электроакустической цепи до компрессора применить предварительное усиление (англ.: Gain compensate), не заботясь (в разумных пределах) о возможных превышениях уровня сигнала на входе динамического регулятора— при оптимальном сочетании порога срабатывания и степени компрессии он сам поможет
Рис. 2-21
Рис. 2-22
| Рис. 2-23 |
избежать критических ситуаций. Такой способ использования называется «сжатием снизу».
Сказанное иллюстрируется серией графиков на рис. 2-23.
Компрессирование динамического диапазона отнюдь не означает автоматического удерживания выходного сигнала на уровне, не превышающем 0 дБ. Если звуковой сигнал с очень большой динамикой оказывается ещё и непредсказуем в смысле запредельных максимальных значений, то звукорежиссёры применяют специфическую настройку амплитудной характеристики компрессора, превращая его тем самым в прибор, именуемый лимитером, динамическим ограничителем. Эта настройка состоит в одновременном увеличении порога срабатывания почти до 0 дБ и степени сжатия— до предельной (теоретически— бесконечной). Такие параметры обеспечивают сохранность динамики входных сигналов вплоть до их граничной величины, что весьма актуально при работе с цифровыми электроакустическими приборами или аппаратурой записи.
Сочетание динамического ограничителя с предварительным усилителем образуют устройство с тривиальным названием «Максимайзер». Оно позволяет значительно увеличить ощущение громкости, при этом пиковые значения сигнала не выходят за допустимые пределы.
Временная характеристика компрессоров и ограничителей представлена тремя свободно регулируемыми параметрами: временем срабатывания (attack time), временем удержания [hold time) и временем восстановления (release time).
Время срабатывания динамического преобразователя определяет скорость его реакции на появление входного сигнала с уровнем выше порогового. Оно может устанавливаться в пределах от десятков микросекунд до нескольких миллисекунд. Казалось бы, с функциональной точки зрения этот параметр надо сделать заведомо минимальным, чтобы прибор снижал коэффициент передачи моментально. Именно так и настраиваются компрессоры и ограничители в большинстве случаев. Но два обстоятельства диктуют иное решение. Во-первых, безынерционность компрессоров на стадии срабатывания будет неприятна для слуха, адаптированного к устойчивому среднему уровню громкости, когда незаметные, и технически неактуальные, короткие пики сигнала станут приводить к регулярным скачкообразным громкостным
модуляциям; здесь время срабатывания компрессора следует увеличивать, иногда значительно. Во-вторых, творческое использование приборов позволяет при необходимости акцентировать атаки некоторых звуков; в этом случае реакция компрессора должна быть чуть больше времени нарастания сигнала.

Когда же сигнал спадает ниже порогового значения, динамический регулятор возвращается в исходное состояние, при этом возрастает коэффициенту передачи. Период такой релаксации называется временем восстановления. Для того, чтобы работа авторегулятора не обращала на себя особого внимания, этот параметр должен быть не меньше времени адаптации слуха к росту громкости, иначе из-за быстрого повышения коэффициента передачи средний уровень сигнала может возрасти неадекватно слуховым привычкам. Такой феномен в особенности проявляется на длительных затухающих звуках после, к примеру, яркого pizzicato (рис. 2-24).

Рис. 2-24
Практический диапазон времени восстановления составляет 0,5-2 сек., хотя приборы позволяют менять этот параметр в более широких пределах. Для некоторых компрессоров критерием в выборе максимального времени восстановления может быть средняя продолжительность пауз в конкретном звуковом материале — к моменту появления каждого очередного всплеска сигнала прибор должен быть готов к срабатыванию.
Здесь следует указать на ещё один варьируемый параметр динамических преобразователей — время удержания прибстра в том или ином состоянии. Установка времени удержания возможна далеко не во всех моделях; простые конструкции ограничиваются настройкой лишь времени срабатывания и времени восстановления. Между тем именно время удержания позволяет авторегулятору не реагировать на слишком частые перепады уровня входного сигнала во имя сохранения исходных динамических соотношений внутри такого звукового эпизода.
Ясно, что при большом времени удержания бессмысленна установка малого времени срабатывания или релаксации.
История конструирования динамических авторегуляторов знает примеры безынерционных устройств, где все временные параметры равны 0. Если в некоторых случаях можно согласиться с моментальным срабатыванием компрессоров, то время их восстановления не может быть нулевым, и не только по вышеуказанным причинам. Линия убывания звука на левом графике рис. 2-24 — идеализирована. В действительности любому акустическому затуханию, будь то колебания струны или реверберационный отзвук в помещении, сопутствуют так называемые флуктуации — двусторонние отклонения физического процесса от его планомерного течения. У безынерционного компрессора флуктуации входного сигнала вблизи пороговой точки вызовут множественные переключения состояний, и возникнет спонтанная модуляция громкости, её скачкообразные увеличения и уменьшения.
Для защиты от флуктуации входного сигнала некоторые динамические приборы делают двухпороговыми —у них точка релаксации расположена несколько ниже точки срабатывания, дабы устройство «поняло», что уровень сигнала снизился уже наверняка.
Применительно к ограничителям сигналов, у которых единственный порог переключения близок к 0 дБ, и устройство не работает в областях возможных флуктуации, временные параметры могут быть минимизированы. В этом случае прибор является так называемым «пикосрезателем», быстро реагирующим на кратковременные превышения допустимых уровней.
Сложные компрессоры и ограничители могут иметь две амплитудные характеристики с двумя автономными, оптимизированными группами временных параметров. По сути дела, это два включённых последовательно динамических прибора, каждый из которых работает в своём диапазоне входных уровней.
Многие современные динамические устройства, работающие с цифровыми сигналами на базе компьютерных комплексов, обладают дополнительными логическими анализаторами, следящими за характером изменения входного сигнала. Параметры таких преобразователей адаптивно изменяются в зависимости от того, насколько медленны или импульсивны перепады уровней.

|
| в одном приборе, например, компрессию или ограничение сигналов с предварительным усилением. |
Частотная характеристика динамических устройств, в большинстве случаев, линейна. Но некоторые приборы обладают функциональной избирательностью к той или иной спектральной зоне. Так, например, специализированные компрессоры для передачи речевых сигналов могут обеспечить, по выбору режиссёра, увеличенную степень сжатия в низкочастотной области для снижения в речи гулкости или «бубнения», либо в высокочастотной области во избежание подчёркивания шипящих и свистящих согласных. Последний вариант бывает представлен в виде специального устройства под названием «де-эссер».
Существуют многополосные динамические преобразователи. По существу, это несколько конструктивно объединённых приборов, с одним каналом передачи (может быть, и стереофоническим). Входной сигнал разделяется на несколько частотных областей (полос), в каждой из которых есть сепаратные настройки. В упрощённых случаях временные параметры для всех полос могут устанавливаться едиными.
Подробности использования таких устройств читатель найдёт в главе о редактировании фонограмм.
Сервисная характеристика приборов для динамической обработки звука говорит о следующих дополнительных возможностях:
• Регулировка характера перегиба амплитудной характери
стики в точке срабатывания. На рисунках 2-21 — 2-23 ам
плитудная характеристика резко меняет свой наклон —
коэффициент передачи компрессора при достижении
входным сигналом порога срабатывания уменьшается
скачком. Выше было показано, как слуховая заметность
этого скачка может быть преодолена увеличением време
ни срабатывания прибора. Но практика показала: такая
компенсация не универсальна, тем более, что короткие
атаки некоторых сигналов могут потребовать и момен
тального срабатывания устройства. Поэтому порог сраба-
тывташя из точки может быть превращен в некоторую
небольшую область возрастания входного сигнала, на
протяжении которой коэффициент передачи компрессо
ра* снизится плавно (рис. 2-25).
• Регулировка входной чувствительности и уровня выход
ного сигнала сообщает динамическому преобразователю
гибкие возможности согласования с любым электроакус
тическим трактом. Кроме того, это позволяет реализовать
Рис. 2-25
• В некоторых случаях необходимо, чтобы коэффициент пе
редачи устройства зависел не от собственного входного
сигнала, а от сигнала другого источника. Представьте си
туацию, когда диктор звучит в музыкальном сопровожде
нии, и ставится задача — автоматически облегчать «ак
компанемент» во имя разборчивости текста. Для этой цели
предусмотрена возможность включать сигнал диктора в
цепь управления компрессора, обрабатывающего динами
ку музыки. При установке относительно большого време
ни релаксации прибор довольно сносно выполняет такую
служебную функцию.
• Использование динамических преобразователей в режи
ме одновременной обработки двух или более связанных
сигналов требует обязательного объединения цепей управ
ления коэффициентом передачи (режим «Link.»). Это де
лается для того, чтобы не нарушался установленный гром-
костной баланс. В противном случае компрессирование
одного из сигналов может существенно снижать уровень
его звучания, в то время как другой сигнал будет оста
ваться в нерегулируемой динамике. Функция «Link» изме
няет коэффициенты передачи всех связанных приборов

|
взаимно-пропорционально, независимо от того, какой из обрабатываемых сигналов достиг порогового уровня. Самый распространенный тому пример — включение динамических регуляторов в цепь стереофонического сигнала, ибо нестационарность пространственного звукового изображения (см. главу «ФОНОГРАФИЧЕСКАЯ КОМПОЗИЦИЯ») замечается слухом сильнее, чем какая-либо динамическая спонтанность.
 Включение компрессоров и ограничителей в электроакустический тракт требует соблюдения принципиальных правил.
Включение компрессоров и ограничителей в электроакустический тракт требует соблюдения принципиальных правил.
При обработке отдельных сигналов нужно пользоваться разъёмом «INSERT», а не линиями «AUX», так как нас интересует не произвольно регулируемая смесь обработанного и необработанного звуков, а единый сигнал с оптимально отрегулированной динамикой.
Особого внимания требуют случаи компрессирования с предварительным усилением, когда обрабатываемый сигнал зашумлен. На стадии срабатывания уровень шума, естественно, спадает, а во время релаксации, особенно в паузах, шум возникает вновь, быстро и плавно. Такое шумовое «дыхание», напоминающее звук морского прибоя с накатыванием песка, почти всегда оказывается чужеродным. Поэтому, несмотря на то, что применение динамической обработки, в принципе, возможно на любом технологическом этапе, для сжатия динамического диапазона с применением начального усиления предпочтительней оказывается стадия микрофонного приёма, в противном случае аналоговый тракт звукозаписи проявит шум магнитной ленты, а при цифровом способе передачи в результате компрессии может возрасти до заметного уровня шум квантования.

