




Погрешность математической модели.
Возникает в результате допущений, принятых при получении модели. Реальность всегда сложнее любой модели, поэтому этот источник погрешности всегда влияет на численное решение. Величина этой погрешности определяется сравнением экспериментальных данных с результатами расчетов по модели (оценивается адекватность модели объекту).
2. Погрешность исходных данных.
Зависит от точности измерения параметров, используемых в модели. Любые измерения приближенны, поэтому и этот источник всегда влияет на решение.
В вычислительной математике эти два вида погрешности (погрешность математической модели и погрешность исходных данных) принято называть неустранимой погрешностью, т.к. она не зависит от метода решения задачи и всегда влияет на ее решение, и ее обязательно нужно учитывать при анализе полученного решения.
3. Погрешность метода решения задачи.
Возникает в результате применения итерационного или вероятностного метода решения.
Эти методы позволяют получить точное решение только в результате бесконечной последовательности действий. Поэтому для получения приближенного решения бесконечный процесс прерывают при достижении требуемой точности решения.
4. Погрешность округления .
Возникает в результате проведения вычислений с конечным числом значащих цифр.
Учесть погрешность округления при большом количестве арифметических действий практически невозможно.
Есть случайные и систематические источники погрешности округления.
Случайные источники обычно компенсируют друг друга.
Например:


Знаки  случайны и компенсируют друг друга при большом n.
случайны и компенсируют друг друга при большом n.
Систематические источники вызывают накопление погрешности округления. Они являются дефектом структуры вычислений (алгоритма).
В машинной арифметике законы коммутативности ( переместительный ) и дистрибутивности ( распределительный ) не всегда соблюдаются.
Рекомендации для снижения ошибок округления:
- При сложении и вычитании последовательности чисел действия необходимо начинать с наименьших по абсолютной величине значений.
- Следует избегать вычитания двух близких чисел, преобразуя выражения.
- Количество арифметических действий для решения задачи нужно сводить к минимуму.
- Для уменьшения ошибки округления расчеты следует проводить с повышенной разрядностью (doubleprecisionв Pascal).
При выборе численного метода решения задачи необходимо учитывать следующее:
1. Погрешность метода должна быть на порядок меньше неустранимой погрешности. Увеличение погрешности метода снижает точность, уменьшение – увеличивает время решения задачи.
2. Погрешность округления должна быть значительно меньше (на два порядка) погрешности метода и неустранимой погрешности.
Для оценки погрешности решения на практике можно использовать следующие приемы:
1. Решить задачу различными численными методами и результаты сравнить.
2. Незначительно изменить исходные данные и повторно решить задачу. Результаты сравнить. Если они различаются сильно, задача или метод ее решения являются неустойчивым – выбрать другой.
3.) Пусть в результате решения задачи по исходному значению величины x находится значение искомой величины y. Если исходная величина имеет абсолютную погрешность D x, то решение имеет погрешность D y. Задача называется устойчивой по исходному параметру x, если решение y непрерывно от него зависит, т. е. малое приращение исходной величины D x приводит к малому приращению искомой величины D y. (малые погрешности в исходной величине приводят к малым погрешностям в результате расчетов.)
Отсутствие устойчивости означает, что даже незначительные погрешности в исходных данных приводят к большим погрешностям в решении или к неверному результату.
Задача называется поставленной корректно, если для любых значений исходных данных из некоторого класса ее решение существует, единственно и устойчиво по исходным данным.
Численный алгоритм (метод) называется корректным в случае существования и единственности численного решения при любых значениях исходных данных, а также в случае устойчивости этого решения относительно погрешностей исходных данных.
Сходимость численного метода- близость получаемого численного решения задачи к истинному решению.
Сходимость итерационного процесса - этот процесс состоит в том, что для решения некоторой задачи и нахождения искомого значения определяемого параметра (например, корня нелинейного уравнения) строится метод последовательных приближений. В результате многократного повторения этого процесса (или итераций) получаем последовательность значений x1, x2,…, xn,… Говорят, что эта последовательность сходится к точному решению x = a, если при неограниченном возрастании числа итераций предел этой
последовательности существует и равен a:  - сходящийся численный метод.
- сходящийся численный метод.
4.)
Всякое значение  , удовлетворяющее условию
, удовлетворяющее условию  , называется корнем уравнения, а способ нахождения этого значения
, называется корнем уравнения, а способ нахождения этого значения  и есть решение уравнения.
и есть решение уравнения.
Методы решения уравнений:
- Прямые (формула Виета для квадратного уравнения и Кардано для кубического и другие)
- Итерационные – для решения любого уравнения
Общая постановка задачи: Найти действительные корни уравнения  , где
, где  - алгебраическая или трансцендентная функция.
- алгебраическая или трансцендентная функция.
Численное решение уравнения проводится в два этапа:
1 этап. Отделение корней уравнения.
2 этап. Уточнение интересующих корней с заданной точностью ε.
Отделение корней – это определение их наличия, количества и нахождение для каждого из них достаточно малого отрезка [a,b], которому он принадлежит.
На первом этапе определяется число корней, их тип. Определяется интервал, в котором находятся эти корни, или определяются приближенные значения корней.
Задача отделения вещественных корней решается аналитическими и графическими методами.
Аналитические методы основаны на функциональном анализе.
Для алгебраического многочлена n-ой степени (полинома) с действительными коэффициентами вида
Pn(x) = an x n + an-1xn-1 +...+a1x+ a0 = 0, (an >0)
верхняя граница положительных действительных корней  определяется по формуле Лагранжа (Маклорена):
определяется по формуле Лагранжа (Маклорена):
 ,
,
где: k ³ 1 – номер первого из отрицательных коэффициентов полинома;
B – максимальный по модулю отрицательный коэффициент.
Нижнюю границу положительных действительных корней  можно определить из вспомогательного уравнения
можно определить из вспомогательного уравнения
Если для этого уравнения по формуле Лагранжа верхняя граница равна R1, то
 =
= 
Тогда все положительные корни многочлена лежат в интервале
≤x+≤  .
.
Интервал отрицательных действительных корней многочлена определяется с использованием следующих вспомогательных функций.
 и
и  .
.
 ≤x–≤
≤x–≤  =
=  =
=  .
.
Постановка задачи:
Отделить корни уравнения, используя аналитический метод:
Методом Лагранжа определим границы положительных и отрицательных корней многочлена.
3x8 – 5x7 – 6x3 – x – 9 = 0
k = 1 B = |– 9| an = 3
 = 4
= 4
 9x8 + x7 + 6x5 + 5x – 3 = 0
9x8 + x7 + 6x5 + 5x – 3 = 0
 |
k = 8 B = 3 an = 9
Отсюда границы положительных корней 0,5 ≤ x+ ≤ 4
 3x8 + 5x7 + 6x3 + x – 9 = 0
3x8 + 5x7 + 6x3 + x – 9 = 0
= 
 9x8 – x7 – 6x5 – 5x – 3 = 0
9x8 – x7 – 6x5 – 5x – 3 = 0
k = 1 B = 6 an = 9
 |
Следовательно, границы отрицательных корней –2 ≤ x– ≤ –0,6
Формула Лагранжа позволяет оценить интервал, в котором находятся все действительные корни, положительные или отрицательные. Поэтому, для определения расположения каждого корня необходимо проводить дополнительные исследования.
Для трансцендентных уравнений не существует общего метода оценки интервала, в котором находятся корни. Для этих уравнений оцениваются значения функции в особых точках: разрыва, экстремума, перегиба и других.
Графически корни можно отделить 2-мя способами:
- Построить график функции y = f(x) и определить координаты пересечений с осью абсцисс− это приближенные значения корней уравнения.
|
|
|


|


|
|
|

Отделение корней на графике f(x).
|
- Преобразовать f(x)=0 к виду j(x) = y(x), где j(x) и y(x) – элементарные функции, и определить абсциссу пересечений графиков этих функций.
| |||
 | |||

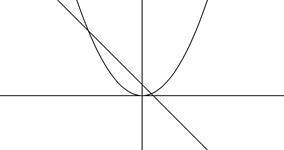
Отделение корней по графикам функций j(x) и y(x).

Схема алгоритма отделения корней.
5.)
Уточнение корня – это вычисление интересующего корня с заданной точностью e.
Приближённые значения корней уравнения, полученные на предыдущем этапе, уточняются различными итерационными методами.
Метод дихотомии (половинного деления, бисекций) - (дихотомия - сопоставленность или противопоставленность двух частей целого) при нахождении корня уравнения f(x)=0 состоит в делении пополам отрезка [a; b], где находится корень.
Алгоритм метода.
- Вычислить координату середины отрезка [a,b] x = (a+b)/2 и значение ¦(x) в этой точке.
- Уменьшить отрезок, отбросив ту его половину, на которой корня нет.
Если знак функции в начале отрезка и в его середине одинаков, то корень находится на второй половине, первую половину можно отбросить, переместив начало отрезка в его середину:
если ¦(a) ·¦(x)>0 => x*Î [x,b] => a=x, иначе x*Î [a, x] => b=x
- Проверить условие завершения вычислений: длина отрезка не превышает заданную точность и значение функции близко к 0 с заданной точностью:
b-a ≤ ε ∩ |¦(x)| ≤ ε.
Если условие достигнуто, расчет завершен, иначе повторить алгоритм сначала.
 |
Геометрическая интерпретация.

|

Схема алгоритма метода бисекций (дихотомии)
6.) Метод Ньютона (касательных)- основан на стратегии постепенного уточнения корня.
 |
Геометрическая интерпретация метода Ньютона.
Уточнение корня – это вычисление интересующего корня с заданной точностью e.
Приближённые значения корней уравнения, полученные на предыдущем этапе, уточняются различными итерационными методами.
На отрезке существования корня выбирается начальное приближение x0. К кривой f(x) в точке А с координатами (x0, f(x0)) проводится касательная. Абсцисса x1 точки пересечения этой касательной с осью ОХ является новым приближением корня.
Из рисунка следует, что x1 = x0 − CB
Из ∆ABC: CD=  . Но
. Но  .
.
Следовательно, 
Аналогично, для i-го приближения можно записать формулу итерационного процесса метода Ньютона:
 , где x0 Î [a;b]. (3.13)
, где x0 Î [a;b]. (3.13)
Условие окончания расчета:  , (3.14)
, (3.14)
где  −корректирующее приращение или поправка.
−корректирующее приращение или поправка.
Условие сходимости итерационного процесса:
 (3.15)
(3.15)
Если на отрезке существования корня знаки  и
и  не изменяются, то начальное приближение, обеспечивающее сходимость, нужно выбрать из условия
не изменяются, то начальное приближение, обеспечивающее сходимость, нужно выбрать из условия
 , x0Î[a;b]. (3.16)
, x0Î[a;b]. (3.16)
 т.е. в точке начального приближения знаки функций и ее второй производной должны совпадать.
т.е. в точке начального приближения знаки функций и ее второй производной должны совпадать.
Геометрическая иллюстрация выбора начального приближения: график f(x) вогнутый,  , тогда x0=b, т.к. f(b)>0.
, тогда x0=b, т.к. f(b)>0.
 Если же выбрать x0=a, то итерационный процесс будет сходиться медленнее или даже расходиться (см. касательную для x0=a).
Если же выбрать x0=a, то итерационный процесс будет сходиться медленнее или даже расходиться (см. касательную для x0=a).
Геометрическая иллюстрация выбора начального приближения: график
f(x) выпуклый, f ’’(x)<0, тогда x0 =a, т.к. f(a)<0.

Схема алгоритма метода Ньютона:
7.)
Метод хорд (секущих).
Этот метод применяется при решении уравнений вида  , если корень уравнения отделён, т.е.
, если корень уравнения отделён, т.е.  и выполняются условия:
и выполняются условия:
1)  (функция
(функция  принимает значения разных знаков на концах отрезка
принимает значения разных знаков на концах отрезка  );
);
2) производная  сохраняет знак на отрезке
сохраняет знак на отрезке  (функция либо возрастает, либо убывает на отрезке ).
(функция либо возрастает, либо убывает на отрезке ).
Первое приближение корня находится по формуле:  .
.
Для следующего приближения из отрезков  и
и  выбирается тот, на концах которого функция имеет значения разных знаков.
выбирается тот, на концах которого функция имеет значения разных знаков.
Тогда второе приближение вычисляется по формуле:
 , если
, если  или
или  , если
, если  .
.
Вычисления продолжаются до тех пор, пока не перестанут изменяться те десятичные знаки, которые нужно оставить в ответе.
Геометрическая интерпретация нахождение решения методом хорд:

При решении уравнения методом хорд поводится прямая соединяющая концы отрезка [a,b]. Из двух точек А и В выбирается х0. Находится точка пересечения хорды с осью OX. Определяется значение функции в точке пересечения и из найденной точки проводится новая хорда. Этот процесс повторяется до получения необходимой точности.
Формула для n-го приближения имеет вид(х0=а, xn-1=b,xn=x):

В методе хорд условием окончания итераций является:
- условие близости двух последовательных приближений:  ;
;
- условие малости невязки  (величина F(xn) есть невязка, полученная на n-й итерации, а
(величина F(xn) есть невязка, полученная на n-й итерации, а  -число, с заданной точностью которого необходимо найти решение).
-число, с заданной точностью которого необходимо найти решение).
Описание алгоритма метода хорд
Шаг 1. Ввод a,b,ε.
Шаг 2. X:=a-f(a)×(b-a)/(f(b)-f(a)).
Шаг 3. Если dF2(b)×F(b)<0, то a:=x;
Если dF2(a)×F(a)<0, то b:=x;
Шаг 4. Пересчитать X по формуле шага 2.
Шаг 5. Выполнять шаг 3, пока abs(b-a)<=eps.
Шаг 4.Вывод результата – x.
Опишем назначение переменных и функций, используемых в процедуре Hord
dF2 – значение второй производной в точке Х
F – значение функции в точке Х
Х0 – начальное значение Х
А – левая граница
В – правая граница
Е – точность вычислений
Fa – значение функции в точке А
Fb - значение функции в точке В
Представим в виде структурной схемы.
Блок схема алгоритма метода хорд:

8.) Метод простых итераций (метод последовательных приближений)- метод реализует стратегию постепенного уточнения значения корня.
xi=φ(xi-1), i=1,2,… где i − номер итерации.- последовательное вычисление значений xi по формуле называется итерационным процессом метода простых итераций, а сама формула - формулой итерационного процесса метода.
Алгоритм решения нелинейного уравнения методом
простых итераций:

Если  , то итерационный процесс сходящийся.
, то итерационный процесс сходящийся.
Условие сходимости 
Точное решение x* получить невозможно, так как требуется бесконечный итерационный процесс.
Можно получить приближенное решение, прервав итерационный xi=φ(xi-1) при достижении условия
 ,
,
где ε - заданная точность; i - номер последней итерации.
В большинстве случаев условие завершения итерационного процесса обеспечивает близость значения xi к точному решению:
Геометрическая иллюстрация метода простых итераций:
1) Итерационный процесс для случая 0<  <1
<1  xÎ[a,b].:
xÎ[a,b].:
 |
 2) Итерационный процесс для случая -1< <1 xÎ[a,b].:
2) Итерационный процесс для случая -1< <1 xÎ[a,b].:
3)Итерационный процесс для случая >1 xÎ[a,b].

4)Итерационный процесс для случая £ - 1 xÎ[a,b].

9.) Методы решения систем линейных алгебраических уравнений:
Прямые(конечные) методы решения СЛАУ: (позволяют найти решение за определенное число операций.)
Метод Крамера
Метод обратной матрицы
Метод Гаусса
Итерационные методы решения линейных алгебраических систем: (основанны на использовании повторяющегося (циклического) процесса и позволяющие получить решение в результате последовательных приближений.)
Метод простой итерации или метод Якоби
Метод Гаусса – Зейделя
Постановка задачи
Требуется найти решение системы m линейных уравнений, которая записывается в общем виде как
 ,
,
Эту систему уравнений можно записать также в матричном виде:
 ,
,
где  ,
,  ,
,  .
.
A – матрица системы,  – вектор правых частей,
– вектор правых частей,  – вектор неизвестных.
– вектор неизвестных.
При известных A и требуется найти такие  , при подстановке которых в систему уравнений она превращается в тождество.
, при подстановке которых в систему уравнений она превращается в тождество.
Необходимым и достаточным условием существования единственного решения СЛАУ является условие det A≠0, т.е. определитель матрицы A не равен нулю. В случае равенства нулю определителя матрица A называется вырожденной и при этом СЛАУ либо не имеет решения, либо имеет их бесчисленное множество.
Система называется обусловленной (не вырожденной, не особенной), если определитель системы DA ¹ 0, и тогда система имеет единственное решение.
Система называется не обусловленной (вырожденной, особенной), если DA = 0, и тогда система не имеет решений или имеет бесконечное множество решений.
Система называется плохо обусловленной, если неустранимая погрешность оказывает сильное влияние на решение; у таких систем определитель близок, но не равен 0.

