




Моментом силы F относительно неподвижной точки О называется физическая величина, определяемая векторным произведением радиуса-вектора г, проведенного из точки О в точку А приложения силы, на силу F (рис. 25):
M = [ rF ].

Здесь М — псевдовектор, его направление совпадает с направлением поступательного движения правого винта при его вращении от г к F.
Модуль момента силы
M = Frsina= Fl, (18.1)
где a — угол между г и F; rsina = l — кратчайшее расстояние между линией действия силы и точкой О — плечо силы.
Моментом силы относительно неподвижной оси z называется скалярная величина Мz, равная проекции на эту ось вектор а М момента силы, определенного относительно произвольной точки О данной оси 2 (рис.26). Значение момента Мz не зависит от выбора положения точки О на оси z.
 Если ось z совпадает с направлением вектора М, то момент силы представля
Если ось z совпадает с направлением вектора М, то момент силы представля  ется в виде вектора, совпадающего с осью:
ется в виде вектора, совпадающего с осью:
М z = [ rF ]z.
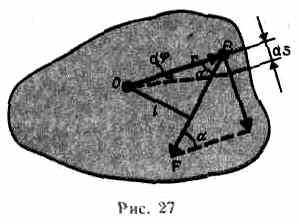
Найдем выражение для работы при вращении тела (рис.27). Пусть сила F приложена в точке В, находящейся от оси вращения на расстоянии r, a — угол между направлением силы и радиусом-вектором r. Так как тело абсолютно твердое, то работа этой силы равна работе, затраченной на поворот всего тела. При повороте тела на бесконечно малый угол dj точка приложения В проходит путь ds= rdj, и работа равна произведению проекции силы на направление смещения на величину смещения:
dA=F sinardj. (18.2) Учитывая (18.1), можем записать dA=Mzdj,
где Fr sina = Fl =Mz — момент силы относительно оси z. Таким образом, работа при вращении тела равна произведению момента действующей силы на угол поворота.
Работа при вращении тела идет на увеличение его кинетической энергии:
dA = dT, но

Учитывая, что w=dj/dt, получим

Уравнение (18.3) представляет собой уравнение динамики вращательного движения твердого тела относительно неподвижной оси.
Можно показать, что если ось вращения совпадает с главной осью инерции (см. §20), проходящей через центр масс, то имеет место векторное равенство

где J — главный момент инерции тела (момент инерции относительно главной оси).
Момент инерции
При изучении вращения твердого тела пользуются понятием момента инерции. Моментом инерции системы (тела) относительно оси вращения называется физическая величина, равная сумме произведений масс n материальных точек системы на квадраты их расстояний до рассматриваемой оси:
В случае непрерывного распределения масс эта сумма сводится к интегралу

где интегрирование производится по всему объему тела. Величина r в этом случае есть функция положения точки с координатами х, у, z.
В качестве примера найдем момент инерции однородного сплошного цилиндра высотой Л и радиусом R относительно его геометрической оси (рис.23). Разобьем

цилиндр на отдельные полые концентрические цилиндры бесконечно малой толщины dr с внутренним радиусом rи внешним — r+dr. Момент инерции каждого полого цилиндра dJ = r2dm (так как dr<<r, то считаем, что расстояние всех точек цилиндра от оси равно r), где dm — масса всего элементарного цилиндра; его объем 2prhdr. Если r — плотность материала, то dm= r• 2prhdr и dJ = 2prr3dr. Тогда момент инерции сплошного цилиндра

но так как p R'2h — объем цилиндра, то его масса m = pR2hr, а момент инерции
 J = 1/2R2.
J = 1/2R2.
Если известен момент инерции тела относительно оси, проходящей через его центр масс, то момент инерции относительно любой другой параллельной оси определяется теоремой Штейнера: момент инерции тела J относительно любой оси вращения равен моменту его инерции Jc относительно параллельной оси, проходящей через центр масс С тела, сложенному с произведением массы mтела на квадрат расстояния а между осями: J = Jc + ma2. (16.1)
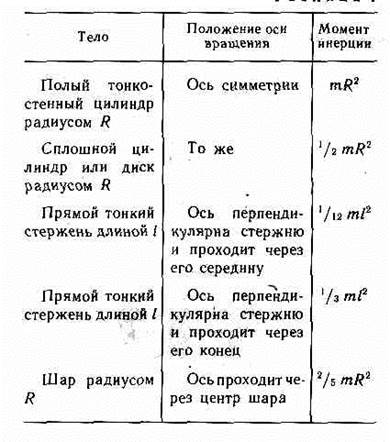
Таблица 1
В заключение приведем значения моментов инерции (табл. 1) для некоторых тел (тела считаются однородными, т — масса тела).
14. Моментом импульса относительно неподвижной оси z называется скалярная величина Lz, равная проекции на эту ось вектора момента импульса, определенного относительно произвольной точки О данной оси. Значение момента импульса Lz не зависит от положения точки О на оси z.
При вращении абсолютно твердого тела вокруг неподвижной оси z каждая отдельная точка тела движется по окружности постоянного радиуса ri с некоторой
скоростью vi. скорость vi; и импульс m ivi
перпендикулярны этому радиусу, т. е. радиус является плечом вектора mi v i. Поэтому можем записать, что момент импульса отдельной частицы
Liz = тiviri (19.1)
и направлен по оси в сторону, определяемую правилом правого винта.
Момент импульса твердого тела относительно оси есть сумма моментов импульса отдельных частиц:

Используя формулу (17.1) vi = wri, получим

т. е.
Lz = Jzw. (19.2)
Таким образом, момент импульса твердого тела относительно оси равен произведению момента инерции тела относительно той же оси на угловую скорость.
Продифференцируем уравнение (19.2) по времени:

т. е.
dLz/dt= Mz
Это выражение — еще одна форма уравнения (закона) динамики вращательного движения твердого тела относительно неподвижной оси: производная момента импульса твердого тела относительно оси равна моменту сил относительно той же оси.
Можно показать, что имеет место векторное равенство
d L /dt= М. (19.3)
В замкнутой системе момент внешних сил М =0 и d L /dt=0, откуда
L = const. (19.4)
Выражение (19.4) представляет собой закон сохранения момента импульса: момент импульса замкнутой системы сохраняется, т. е. не изменяется с течением времени.
Закон сохранения момента импульса — фундаментальный закон природы, Он связан со свойством симметрии пространства — его изотропностью,

