




Трансформатор
Трансформатор это устройство преобразующее переменное напряжение одной величины в переменное напряжение другой величины той же частоты.
 Условно графические изображение однофазного (а, б, в, г) и трехфазных (д, е) трансформаторов приведены на рис. 5.1.
Условно графические изображение однофазного (а, б, в, г) и трехфазных (д, е) трансформаторов приведены на рис. 5.1.

Рис. 5.1 – Условно графические изображение однофазного (а, б, в, г) и трехфазных (д, е) трансформаторов
Коэффициент трансформации
Если подать на первичную обмотку трансформатора c числом витков w1 напряжение  , то на концах вторичной обмотки с числом витков w1 возникнет напряжение
, то на концах вторичной обмотки с числом витков w1 возникнет напряжение  .
.
Величина  называется коэффициентом трансформации трансформатора.
называется коэффициентом трансформации трансформатора.
Коэффициент трансформации может быть оценен по соотношению  , где
, где  и
и  – число витков первичной и вторичной обмоток соответственно.
– число витков первичной и вторичной обмоток соответственно.
Если  ,то трансформатор повышающий, если
,то трансформатор повышающий, если  понижающий.
понижающий.
Произведение тока соответствующей обмотки на число витков этой обмотки называют магнитодвижущей силой (МДС)
 .
.
Размерность МДС [F] – Aмпeр (ампер-виток).
Уравнение магнитного состояния трансформатора:
 ,
,
где  –ток первичной обмотки трансформатора в режиме холостого хода,
–ток первичной обмотки трансформатора в режиме холостого хода,  – токи первичной и вторичной обмоток трансформатора.
– токи первичной и вторичной обмоток трансформатора.
Уравнение электрического состояния трансформатора:
 ;
;  ,
,
где  ,
,  –комплексы ЭДС первичнойи вторичной обмоток трансформатора;
–комплексы ЭДС первичнойи вторичной обмоток трансформатора;  – комплекс тока первичнойобмотки трансформатора;
– комплекс тока первичнойобмотки трансформатора;  – приведенный к первичной обмотке комплекс тока вторичной обмотки трансформатора
– приведенный к первичной обмотке комплекс тока вторичной обмотки трансформатора
 ,
,
где  – комплексное сопротивление первичной обмотки трансформатора;
– комплексное сопротивление первичной обмотки трансформатора;  –приведенное к первичной обмотке комплексное сопротивление вторичной обмотки трансформатора.
–приведенное к первичной обмотке комплексное сопротивление вторичной обмотки трансформатора.
 .
.
Различают три режима работы трансформатора:
Режим холостого хода – при этом нагрузка отключена  .
.  равно ЭДС вторичной обмотки
равно ЭДС вторичной обмотки  .
.
Режим нагрузки или рабочий режим:
Трансформатор работает на номинальную нагрузку (
 ).
).
Короткое замыкание – аварийный режим (в этом случае  ). Трансформатор в таком режиме работать не может.
). Трансформатор в таком режиме работать не может.
Рабочая (внешняя) характеристика трансформатора – это зависимость выходного напряжения от тока нагрузки  :
:
 (рис.23).
(рис.23).

Рис. 5.2 – Рабочая характеристика трансформатора
КПД трансформаторов – это отношение активной мощности на выходе трансформатора к активной мощности на входе

а) КПД трансформаторов снижается из-за потерь энергии. Эти потери складываются из электрических и магнитных потерь.
 .
.
б) магнитные потери – это потери на перемагничивание и нагрев магнитопровода вихревыми токами.
в) Электрические потери обусловлены нагревом проводов обмоток протекающим по ним токами:  .
.
Магнитные потери происходят из-за нагрева магнитопровода вихревыми токами и потерь на перемагничивание (гистерезис).
Технические характеристики трансформаторов:
¾ Тип трансформатора (однофазный, трехфазный);
¾  – напряжения первичной и вторичной обмоток;
– напряжения первичной и вторичной обмоток;
¾  – коэффициент трансформации;
– коэффициент трансформации;
¾ Полная мощность  ;
;
¾ Коэффициент мощности  ;
;
¾ КПД – коэффициент полезного действия;
¾ Тип охлаждения (воздушный, масляный).
Вероятные вопросы интернет тестирования по теме 5.1
1.Условно графическое обозначение трехфазного трансформатора с нейтральным проводом?

Ответ(е)
2. Коэффициент трансформации трансформатора:
(а) ( ),
),
(б) ( ),
),
в( )
)
г( )?
)?
Ответ (б).
3 Уравнение магнитного состояния трансформатора?
(а)
(б)  ;
;
(в)  ;
;
(г) 
Ответ (а).
4. Рабочая (выходная) характеристика трансформатора это зависимость:?
(а) 
(б)  ;
;
(в) 
(г) 
Ответ (г).
5.Если :
(а)трансформатор понижающий,
(б) повышающий;
(в) К больше единицы быть не может;
(г) Трансформатор работает в режиме перегрузки.
Ответ (б).
Электрические машины
Электрические машины это электротехнические устройства (ЭТУ) служащие для преобразования:
1) электрической энергии в механическую – (двигательный режим);
2) механическую энергию в электрическую – (генераторный режим).
Существуют два основных вида электрических машин: машины постоянного тока и машины переменного тока (асинхронные и синхронные).
Принцип действия всех электрических машин базируется на двух законах:
1) на законе электромагнитной индукции –  ;
;
2) на законе Ампера –  .
.
В генераторном режиме базовым является закон ЭМИ. Для работы генератора необходимо каким либо образом изменять (используя механическую энергию) магнитный поток 
 пронизывающий электрический проводник. В проводнике возникает ЭДС, а на концах проводника разность потенциалов (напряжение). При подключении к концам проводника внешней нагрузки (сопротивления) по нагрузке потечет ток.
пронизывающий электрический проводник. В проводнике возникает ЭДС, а на концах проводника разность потенциалов (напряжение). При подключении к концам проводника внешней нагрузки (сопротивления) по нагрузке потечет ток.
В двигательном режиме базовым является закон Ампера. При подключении к проводнику внешнего источника электрической энергии по нему потечет ток. Если проводник с током поместить в магнитное поле, то на него будет действовать сила F тем большая, чем больше ток, магнитное поле и длина проводника.
Машины постоянного тока
Машины постоянного тока состоит из двух основных частей: неподвижной части – статора и вращающейся части – ротора. Устройство (схематично) машины постоянного тока показано на рис. 5.3.

Статор представляет собой стальной корпус – станину, на внутренней цилиндрической поверхности которого укреплены сердечники главных полюсов с полюсными наконечниками. На сердечники надеты катушки, составляющие обмотку возбуждения, подключенную к источнику постоянного тока. Обмотка возбуждения расположена на главных полюсах и создает основной магнитный поток Ф двигателя.
Ротор состоит из якоря и коллектора, которые крепятся на одном валу и в механическом отношении составляют одно целое. Якорь представляет собой цилиндрический сердечник, собранный из листов электротехнической стали. В его продольных пазах уложена обмотка, выполненная из отдельных секций соединенных между собой и с коллекторными пластинами.
Коллектор представляет собой цилиндр, составленный из отдельных медных пластин, изолированных друг от друга и от вала якоря. На коллектор накладываются неподвижные медно-графитовые щетки, посредством которых осуществляется соединение обмотки якоря с выводными клеммами. Коллектор и щетки предназначены для изменения направления тока в проводниках обмотки якоря при их переходе из зоны магнитного полюса одной полярности (например, северного полюса) в зону полюса другой полярности – (южного полюса). Благодаря этому сохраняется неизменным направление вращения якоря для режима двигателя или полярность выходного напряжения в режиме генератора.
Существуют четыре способа возбуждения основного магнитного потока машины:
1) независимого возбуждения;
2) последовательного (с цепью ротора);
3) параллельного (с цепью ротора);
4) смешанного возбуждения.
Основные схемы возбуждения представлены на рис. 5.1 (а, б, в, г) соответственно:

Рис. 5.4 – схемы независимого (а), последовательного (б), параллельного (в) и смешанного (г) возбуждения основного магнитного поля машин постоянного тока
Ток обмотки возбуждения в случае независимого или параллельного возбуждения обычно составляет 1-5% от тока якоря. В случае последовательного возбуждения ток якоря равен току возбуждения.
Условно графическое изображение машин постоянного тока в генераторном (рис. 5.5 а) и двигательном режиме (рис. 5.5 б).

Рис. 5.5 – Условно графическое изображение машин постоянного тока в генераторном (а) и двигательном режиме (б)
В генераторном режиме ЭДС и ток якоря совпадают по направлению. В двигательном режиме, ЭДС, возникающая при вращении ротора, направлена навстречу внешнему напряжению и току якоря, ее называют противо ЭДС.
Двигательный режим МПТ
МПТ независимого возбуждения
При подключении постоянного напряжения к катушкам возбуждения в них возникают ток возбуждения  . Это ток создает магнитное поле В в полости статора.
. Это ток создает магнитное поле В в полости статора.
При подключении к двигателю постоянного напряжения  в проводниках цепи якоря возникают токи
в проводниках цепи якоря возникают токи  . В результате взаимодействия проводника с током с магнитным полем статора В, возникает сила Ампера
. В результате взаимодействия проводника с током с магнитным полем статора В, возникает сила Ампера  . Сила Ампера создает электромагнитный момент вращения:
. Сила Ампера создает электромагнитный момент вращения:
 ,
,
где  – коэффициент, зависящий от конструктивных параметров двигателя; – ток якоря;
– коэффициент, зависящий от конструктивных параметров двигателя; – ток якоря;  – магнитный поток машины.
– магнитный поток машины.  , где S эффективная площадь витка якорной обмотки,
, где S эффективная площадь витка якорной обмотки,  и
и  – диаметр и длина ротора соответственно.
– диаметр и длина ротора соответственно.
Под действием вращающего момента ротор вращается. Ротор вращается в магнитном поле, вследствие этого в проводниках якорной обмотки возникает (по закону ЭМ индукции) электродвижущая сила Е. Эта ЭДС направлена навстречу внешнему напряжению, поэтому ее называют противо ЭДС. Это приводит к следующему виду уравнения двигателя:

ЭДС зависит от скорости вращения и величины магнитного потока:
 .
.
Если двигатель «нагрузить», то есть создать на валу противодействующий момент  , то в установившемся режиме момент вращения
, то в установившемся режиме момент вращения  будет равен тормозному моменту . Главной характеристикой МПТ является ее механической характеристики
будет равен тормозному моменту . Главной характеристикой МПТ является ее механической характеристики  .
.
Уравнение механической характеристики для ДПТ независимого возбуждения это прямая и имеет вид:
 .
.
График механической характеристики приведен на рис. 5.6.

Рис. 5.6 – График механической характеристики двигателя постоянного тока
Из уравнения механической характеристики можно видеть способы регулирования частоты в ДПТ. Используют три способа:
1) Изменяя входное напряжение U (линейная зависимость);
2) Изменяя магнитный поток – регулируя ток возбуждения  (обратная зависимость).
(обратная зависимость).
3) Изменяя величину дополнительного сопротивления, который включают последовательно в цепь якоря  (линейная зависимость).
(линейная зависимость).
4) Для изменения направления вращения ротора (реверса) можно использовать два способа:
a) изменить знак (полярность) входного напряжения ;
б) изменить направление основного магнитного поля (изменить направление тока в катушках возбуждения или поменять знак напряжения возбуждения).
Генераторный режим МПТ независимого возбуждения
Генератор служит для преобразования механической энергии в электрическую энергию.
Устройство генератора и двигателя одинаковы.
При подключении постоянного напряжения к катушкам возбуждения в них возникают ток возбуждения  . Это ток создает магнитное поле В в полости статора.
. Это ток создает магнитное поле В в полости статора.
В генераторном режиме МПТ ротор вращают с помощью внешней приложенной силы. Вследствие этого, в проводниках якорной обмотки ротора возникает (по закону электромагнитной индукции) электродвижущая сила . На концах обмотки якоря возникает разность потенциалов U. Если к выходным клеммам генератора подключить нагрузочное сопротивление, то по нему потечет ток  . Это ток равен току якоря . Ток якоря, протекая по проводам якоря создает на них падение напряжения
. Это ток равен току якоря . Ток якоря, протекая по проводам якоря создает на них падение напряжения  и нагревает их (
и нагревает их ( - сопротивление проводов обмоток якоря). Поэтому, напряжение на клеммах генератора будет меньше ЭДС генератора на величину падения напряжения в цепи якоря
- сопротивление проводов обмоток якоря). Поэтому, напряжение на клеммах генератора будет меньше ЭДС генератора на величину падения напряжения в цепи якоря  . Уравнения генератора:
. Уравнения генератора:

Это уравнение называют так же внешней или рабочей характеристикой генератора. (рис. 5.7)

Рис.5.7 – Внешней характеристика генератора
На практике важны следующие технически характеристики генератора:
¾  – номинальное выходное напряжение, (кВ);
– номинальное выходное напряжение, (кВ);
¾  – номинальная выходная мощность (кВт);
– номинальная выходная мощность (кВт);
¾  – номинальный ток нагрузки (A);
– номинальный ток нагрузки (A);
¾ n – номинальная скорость вращения ротора (об/мин);
¾ способ возбуждения магнитного поля.
Вероятные вопросы интернет тестирования по теме 5.2
1.Электромагнитный момент двигателя постоянного тока независимого возбуждения равен:
(а)  ,
,
(б)  ,
,
(в)  ,
,
(г)  ,
,
Ответ(в)
3.Уравнение двигателя постоянного тока независимого возбуждения имеет вид::
(а)
(б) 
(в)
(г) 
Ответ(г)
4.Уравнение механической характеристики МПТ независимого возбуждения имеет вид:
(а) 
(б)
(в) 
(г) 
Ответ(б)
5.Уравнение рабочей характеристики генератора постоянного тока с независимым возбуждением имеет вид:
(а)
(б) 
(в) 
(г) 
Ответ(а)
Машины переменного тока
Асинхронные машины
Асинхронные машины с короткозамкнутым ротором
Асинхронная машина состоит из неподвижного статора и вращающегося ротора .
Статор изготовлен в виде полого стального цилиндра c пазами на внутренней стороне. В пазахстатора расположена трех фазная обмотка (несколько токовых катушек с осями под углом  , где
, где  – число пар катушек-полюсов). Обмотки соединяются между собой по схеме «звезда» или «треугольник».
– число пар катушек-полюсов). Обмотки соединяются между собой по схеме «звезда» или «треугольник».

Рис. 5.8 – Устройство (схематично) статора асинхронной машины и схемы соединений обмоток статора
Ротор представляет собой цилиндрический сердечник. Сердечник ротора насажен на вал, закрепленный в подшипниках. В пазах сердечника ротора располагаются алюминиевые или медные стержни короткозамкнутой обмотки, торцевые концы которых замыкаются накоротко кольцами из того же материала, что и стержни (так называемое “беличье колесо”).
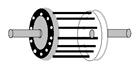
Рис. 5.9 – Устройство (схематично) короткозамкнутого ротора асинхронной машины
Принцип действия асинхронного двигателя (АД) – основан на взаимодействии вращающегося магнитного поля статора с токами, которые наводятся этим полем в проводниках ротора. Вращающееся магнитное поле статора создается трехфазными токами катушек статора оси которых расположенных под углом  градусов по периметру статора. Скорость вращения магнитного поля определяется формулой
градусов по периметру статора. Скорость вращения магнитного поля определяется формулой  [об/мин], где
[об/мин], где  – частота тока протекающего по обмоткам статора. (Обычно это частота сети – 50Гц). Магнитное поле, пересекая активные проводники короткозамкнутой обмотки ротора, индуцирует в них ЭДС, согласно закону ЭМИ. В замкнутом проводнике ротора возникает ток
– частота тока протекающего по обмоткам статора. (Обычно это частота сети – 50Гц). Магнитное поле, пересекая активные проводники короткозамкнутой обмотки ротора, индуцирует в них ЭДС, согласно закону ЭМИ. В замкнутом проводнике ротора возникает ток  . На проводник с током, помещенный в магнитное поле действует сила Ампера, направление которой определяется правилом левой руки. Эта сила создает вращающий момент:
. На проводник с током, помещенный в магнитное поле действует сила Ампера, направление которой определяется правилом левой руки. Эта сила создает вращающий момент:  , где
, где  – сила Ампера, –диаметр ротора,
– сила Ампера, –диаметр ротора,  – конструктивный коэффициент.
– конструктивный коэффициент.
Ротор начинает вращаться в направлении вращения магнитного поля с частотой  несколько меньшей
несколько меньшей  из-за наличия сил сопротивления или трения. Степень отставания ротора от магнитного поля статора характеризуется параметром скольжения .
из-за наличия сил сопротивления или трения. Степень отставания ротора от магнитного поля статора характеризуется параметром скольжения .  . Так как скорость вращения магнитного поля и скорость вращения ротора не равны, машина называется асинхронной. Под действием нагрузки скорость вращения ротора уменьшается.
. Так как скорость вращения магнитного поля и скорость вращения ротора не равны, машина называется асинхронной. Под действием нагрузки скорость вращения ротора уменьшается.
Различают три режима работы асинхронной машины: генераторный, двигательный и режим электромагнитного тормоза.
В генераторном режиме  , в двигательном режиме
, в двигательном режиме  , в режиме электромагнитного тормоза
, в режиме электромагнитного тормоза  .
.
В режиме электромагнитного тормоза ротор вращают в направлении обратным вращению магнитного поля статора .
Механическая характеристика АД
Механическая характеристика АД двигателя – это зависимость числа оборотов ротора n от момента сил сопротивления M на валу  В установившемся (статическом) режиме электромагнитный момент тяги на валу двигателя равен моменту сил сопротивления – нагрузки
В установившемся (статическом) режиме электромагнитный момент тяги на валу двигателя равен моменту сил сопротивления – нагрузки  . На графике механической характеристики (рис. 5.10) можно выделить характерные области:
. На графике механической характеристики (рис. 5.10) можно выделить характерные области:
1)  ,
,  пуск двигателя, разгон от
пуск двигателя, разгон от  до
до 
Если нагрузка на валу , то  → холостой ход;
→ холостой ход;
2) Если  → область недогрузки;
→ область недогрузки;
3)  → номинальный режим;
→ номинальный режим;
4)  → область перегрузки.
→ область перегрузки.
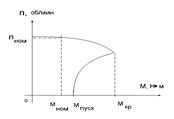
Рис. 5.10 – Механическая характеристика асинхронного двигателя
Если величина нагрузки превысит некоторый кретический для данного двигателя предел  – ротор остановиться.
– ротор остановиться.
В номинальном режиме для двигателей различной мощности скольжение лежит в диапозоне  .
.
Асинхронная машина с фазным ротором
Статор машины с фазным ротором такой же как и для асинхронной машины. Обмотка фазного ротора, называемого так же ротором с контактными кольцами, выполняется изолированными проводами. В большинстве случаев она трехфазная. Три фазные обмотки ротора соединяются на самом роторе звездой, а свободные концы их соединяются с тремя контактными кольцами, укрепленными на валу машины, но изолированными от этого вала.
Условно графические изображения асинхронных машин с короткозамкнутым и фазным роторами приведена на рис. 5.11 а и б соответственно.
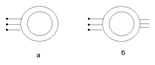
Рис. 5.11 – Условно графическое изображение асинхронных машин с короткозамкнутым и фазным роторами
Технические характеристики машин переменного тока:
¾ Тип двигателя;
¾ Рабочее напряжение (трех фаз/380В/220В);
¾ Номинальный момент на валу (например 110Н/м);
¾ Перегрузочная способность (кратность пускового тока или момента на валу (например 5,2);
¾ Мощность двигателя (например 100кВт);
¾ Коэффициент мощности cosφ (например 0,87);
¾ КПД (например 80%).
Способы пуска двигателя
Двигатели переменного тока имеют недостаток. У них большой пусковой ток. Он может превышать номинальный в несколько раз (от 2 до 10 раз). Это может привести к выходу из строя источника питания двигателя.
Используют несколько способов пуска:
Для двигателей небольшой мощности до 100 кВт –прямой пуск. Для двигателей большой мощности > 100 кВт – переключением обмоток с треугольника на звезду или включением регулирующих трансформаторов или используя ротор в виде двойного бельичего колеса.
Способы регулирования частоты вращения ротора асинхронных машин переменного тока
Из формулы для скорости вращения магнитного поля видно, что скорость вращения можно изменять двумя способами:
1) Изменяя частоту подводимого к двигателю напряжения, (с помощью частотных преобразователей);
2) Изменяя число пар полюсов (переключая обмотки статора);
3) Для АД с фазным ротором (в небольших пределах) можно изменять частоту вращения ротора путем изменением токов фазных обмоток ротора.
Синхронные машины
Синхронные машины являются основными машинами электроэнергетики.
Статор синхронной машины одинаков со статором асинхронных машин. Скорость вращения магнитного поля статора дается той же формулой:
,
где число пар полюсов.
Ротор синхронной машины это или постоянный магнит или электромагнит расположенный на валу машины. Обмотки ротора электромагнита питаются от источника постоянного тока через контактные кольца.
Принцип действия синхронной машины так же базируется на законах ЭМИ и законе Ампера.
Схематично устройство синхронной машины приведено на рис. 5.12.
Статорная обмотка подключается к трехфазной сети

Рис. 5.12 – Устройство (схематично) синхронной машины переменного тока
В генераторном режиме ротор вращается c угловой скоростью  за счет внешней энергии (энергии турбин на ТЕЦ). Магнитный поток ротора пронизывает каждую из обмоток статора изменяется и наводит в них переменную ЭДС с частотой . Так как частота напряжения на концах статорных обмоток совпадает с частотой вращения ротора машина называется синхронной.
за счет внешней энергии (энергии турбин на ТЕЦ). Магнитный поток ротора пронизывает каждую из обмоток статора изменяется и наводит в них переменную ЭДС с частотой . Так как частота напряжения на концах статорных обмоток совпадает с частотой вращения ротора машина называется синхронной.
Двигательный режим синхронной машины
В двигательном режиме трехфазное напряжение с частотой подается на обмотки статора. Магнитное поле статора изменяется как во времени так и в пространстве с частотой  . Взаимодействие магнитного поля статора с магнитным полем ротора создает вращающий момент на валу двигателя. Однако так как масса ротора большая, ротор не может быстро набрать вращательную скорость, а скорость изменения магнитного поля статора большая. Поэтому в начальной стадии пуска необходимо с помощью внешнего устройства разогнать ротор до скорости близкой к скорости вращения магнитного поля статора. В таком положении полюс магнитного поля статора и магнитный полюса ротора будут относительно друг друга неподвижны и сила их взаимодействия будет наибольшей.
. Взаимодействие магнитного поля статора с магнитным полем ротора создает вращающий момент на валу двигателя. Однако так как масса ротора большая, ротор не может быстро набрать вращательную скорость, а скорость изменения магнитного поля статора большая. Поэтому в начальной стадии пуска необходимо с помощью внешнего устройства разогнать ротор до скорости близкой к скорости вращения магнитного поля статора. В таком положении полюс магнитного поля статора и магнитный полюса ротора будут относительно друг друга неподвижны и сила их взаимодействия будет наибольшей.
Синхронные машины используют в промышленности в нескольких вариантах:
1) Как источники электрической энергии (генератор);
2) Как двигатель с постоянной скоростью вращения (скорость  не зависит от момента на валу);
не зависит от момента на валу);
3) Как компенсатор реактивной энергии для улучшения коэффициента мощности (реактивная составляющая внутреннего сопротивления синхронной машины зависит от тока обмоток возбуждения (величины магнитного поля) ротора).
Условия для включения в сеть синхронной машины
Для правильного включения синхронной машины в сеть необходимо выполнить три условия:
1) Частота вращения ротора должна равняться частоте сети;
2) ЕДС и фаза напряжения на клеммах статора должна равняться напряжению и фазе сети;
3) Последовательность фаз статора должна совпадать с последовательностью фаз сети.
Условно графической изображение явнополюсного (постоянный магнит) и неявнополюсного (электромагнит) роторов синхронной машины приведены на рис. 5.13 а и б соответственно.

Рис.5.13 – Условно графической изображение явнополюсного (постоянный магнит) и неявнополюсного (электромагнит) роторов синхронной машины
Механическая характеристика синхронной машины
Скорость вращения ротора синхронной машины не зависит от момента нагрузки на валу (до определенных пределов).
 ,
,  .
.

Рис.5.14 – Механическая характеристика синхронной машины
Возможные вопросы интернет тестирования по теме 5.3 и 5.4:
1.Параметр скольжения дается формулой:
(а).  .
.
(б).  .
.
(в). .
(г).  .
.
Ответ(в)
2.Механическая характеристика синхронного двигателя машины имеет вид:
(а)  .
.
(б)  .
.
(в)  .
.
(г)  .
.
Ответ(а)
3.. Скорость вращения магнитного поля статора синхронной машины дается формулой:
(а)  , (б)
, (б)  ,
,
(в)  , (г) ,
, (г) ,
Ответ(г)
4. Условия для включения в сеть синхронной машины
Для правильного включения синхронной машины в сеть необходимо выполнить условия:
(а) Частота вращения ротора должна быть асинхронной частоте сети; ЕДС и фаза напряжения на клеммах статора должна равняться напряжению и фазе сети; последовательность фаз напряжений статора должна совпадать с последовательностью фаз сети.
(б) Частота вращения ротора должна равняться частоте сети; ЕДС и фаза напряжения на клеммах статора должны быть противоположны; последовательность фаз напряжений статора должна совпадать с последовательностью фаз сети.
(в) Частота вращения ротора должна равняться частоте сети; ЕДС и фаза напряжения на клеммах статора должна равняться напряжению и фазе сети; последовательность фаз напряжений статора должна совпадать с последовательностью фаз сети.
(г) Частота вращения ротора должна равняться частоте сети; ЕДС и фаза напряжения на клеммах статора должна равняться напряжению и фазе сети; последовательность фаз напряжений статора должна быть обратной последовательности фаз сети.
Ответ(в)
5. Момент пуска на механической характеристике асинхронного двигателя соответствует точке:
(а) А; (б) Б;(в) В; (г) Г

Ответ(г)
6.Если скольжение S=0, то на механической характеристике асинхронного двигателя это соответствует точке:
(а) А; (б) Б;(в) В; (г) Г
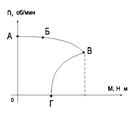
Ответ(а)
Основы электроники
Диод
Принцип действия и устройство:Диод – устройство состоящее из контакта двух полупроводников p и n типа (рис.6.1).

Рис.6.1 – Структура полупроводникового диода
В месте контакта полупроводников образуется особая зона называемая p- n переходом. Между р и n зонами образуется разность потенциалов. Существуют диоды на основе атомов кремния и германия. Контактная разность потенциалов  для диодов на основе германия составляет 0,2В ÷ 0,4В, для диодов на основе кремния 0,4В ÷ 0,6В.
для диодов на основе германия составляет 0,2В ÷ 0,4В, для диодов на основе кремния 0,4В ÷ 0,6В.
Условно графическое обозначение диода дано на рис. 6.2.

Рис.6.2 – Условно графическое обозначение диода
Вольтамперные характеристики диодов (ВАХ) –  представлены на рис.6.3.
представлены на рис.6.3.

Рис.6.3 – Вольтамперная характеристика диода
Из ВАХ видно, что диод хорошо проводит ток в одном направлении (если прямое напряжение  ) и плохо в противоположном. Эти токи и соответствующие напряжения между выводами диода называются прямыми и обратными токами –
) и плохо в противоположном. Эти токи и соответствующие напряжения между выводами диода называются прямыми и обратными токами –  , прямыми и обратными напряжениями –
, прямыми и обратными напряжениями –  .
.
Если обратное напряжение станет больше максимального допустимого  наступает пробой, ток в обратном направлении резко увеличивается,
наступает пробой, ток в обратном направлении резко увеличивается,  переход разогревается и диод разрушается.
переход разогревается и диод разрушается.
Типы диодов:
Выпрямительные, импульсные, СВЧ, специальные: регулируемая емкость (варикап), стабилитрон, фотодиоды, излучающие световые диоды.
Технические характеристики:
¾ Тип диода, (Si, Ge), маркировка;
¾  – максимально допустимый прямой ток, [A];
– максимально допустимый прямой ток, [A];
¾  – максимально допустимое обратное напряжение, [B];
– максимально допустимое обратное напряжение, [B];
¾  – максимально допустимая мощность рассеивания, (Вт).
– максимально допустимая мощность рассеивания, (Вт).
Назначение: выпрямители, детекторы сигналов (радио и телесвязь), логические элементы, цифровые устройства, стабилизаторы напряжения, шунты обратного напряжения, регулируемые емкости, световые индикаторы.
Стабилитрон
Стабилитрон особый тип диода. В его работе использует обратную ветвь ВАХ – ветвь неразрушающего пробоя.
Условно- графическое изображение стабилитрона на рис. 6.4.

Рис. 6.4 – Условно-графическое изображение стабилитрона
Вольтамперная характеристика стабилитрона приведена на рис.6.5.
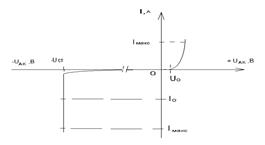
Рис. 6.5 – Вольтамперная характеристика стабилитрона
 – напряжение стабилизации,
– напряжение стабилизации,  – средний ток стабилизации.
– средний ток стабилизации.
Из ВАХ видно, что при изменениях тока через стабилитрон (в пределах рабочей области) падение напряжения на стабилитроне изменяется незначительно. Обычно относительное изменение составляет 0,1 ÷ 1%.
Технические характеристики:
¾ Тип стабилитрона, маркировка;
¾ - напряжение стабилизации [B];
¾  ,
,  – пределы тока стабилизации [A];
– пределы тока стабилизации [A];
¾ – максимально допустимое обратное напряжение [B];
¾ – максимально допустимая мощность рассеивания [Вт].
Назначение: стабилизаторы напряжения, ограничители напряжения.
Схема включения стабилитрона представлена на рис.6.6.

Рис. 6.6– Схема включения стабилитрона
 – задает ток стабилизации ,
– задает ток стабилизации ,  – сопротивление нагрузки, – входное напряжение, – выходное стабилизированное напряжение.
– сопротивление нагрузки, – входное напряжение, – выходное стабилизированное напряжение.
Стабилитрон работает только если начальное напряжение на нем больше . При этом соотношении через стабилитрон начинает протекать ток и создается режим стабилизации.
Вероятные вопросы тестирования по теме 6.1и 6.2:
1.Диод это полупроводниковое устройство:
(а) с одним p-n переходом;
(б) с полупроводником одного типа;
(б) с двумя полупроводниками одного типа;
(б) с двумя проводниками разного типа.
2.Тиристор это полупроводниковое устройство:
(а) с двумя p-n переходами;
(б)) с тремя или более p-n переходами;
(в) с двумя полупроводниками одного типа;
(г) с 3 тремя полупроводниками разного типа.
2.Реальный диод проводит ток если:
(а) напряжение анод- катод Uак больше «0»;
(б) напряжение анод- катод Uак больше потенциального барьера;
(в) напряжение анод- катод Uак меньше потенциального барьера;
(г) напряжение анод- катод Uак меньше «0».
Ответ(а)
2.В реальном диоде падение напряжения при прямом включении диода (на основе атомов кремния) составляет:
(а) 0,0÷ 0,1В;
(б) -0,2÷0,3В;
(в) 0,4÷0,5В;
(г) 0,6÷ 0,8В.
Ответ(г)
3.В реальном диоде падение напряжения при прямом включении диода (на основе атомов германия) составляет:
(а) 0,0÷ 0,1В;
(б) 0,2÷0,4В;
(в) 0,4÷0,5В;
(г) 0,6÷ 0,8В.
Ответ(б)
4. Принцип действия стабилитрона основан на:
(а) независимости напряжения пробоя от тока нагрузки;
(б)зависимости напряжения пробоя от тока нагрузки;
(в) независимости напряжения пробоя от напряжения нагрузки;
(г) независимости напряжения нагрузки от тока нагрузки;
Ответ(а)
Транзистор
Устройство: Транзистор этополупроводниковое устройство (управляемое сопротивление), служащее для преобразования электрических сигналов: усиления, генерации, прерывания.
Существуют биполярные (n-p-n или p-n-p) и полевые транзисторы. В биполярных транзисторах (рис. 6.7) имеется два p - n перехода: переход база–эмиттер и переход база–коллектор.
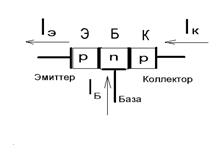
Рис.6.7 – Структура биполярного транзистора
Ток эмиттера складывается из тока базы и тока коллектора
 ,
,
где  – ток базы,
– ток базы,  – ток эмиттора,
– ток эмиттора,  – ток коллектора.
– ток коллектора.
Изменения тока базы, при постоянном напряжении коллектор эмиттер, приводят к значительному изменению тока коллектора.Коэффициент  называют коэффициентом усиления по току. Диапазон изменения
называют коэффициентом усиления по току. Диапазон изменения  .
.
Биполярный транзистор управляется током. Ток управления может быть значительным.
Входное сопротивление биполярного транзистора:
 ;
;  .
.
Полевые транзисторы имеют так же два p-n перехода, но с более сложной структурой. Полевой транзистор управляется напряжением. Ток управления мал, входное сопротивление большое, до 108 Ом. Существуют несколько типов полевых транзисторов: полевой с управляющим p-n переходом, полевой со структурой Керамика-Металл- Оксид-Подложка (КМОП)и другие.
Условно графическое обозначение биполярного и полевого транзисторов приведены на рис. 6.8. а и б соответственно.

а б
Рис. 6.8 – Условно графическое обозначение биполярного (а) и полевого транзисторов (б)
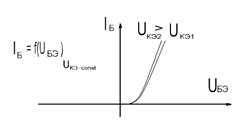
Входнаяхарактеристика биполярного транзистора (рис. 6.9):

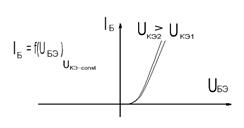
Рис. 6.9 – Входная характеристика биполярного транзистора
Выходная характеристика биполярного транзистора
 (рис. 6.10):
(рис. 6.10):

Рис. 6.10 – Выходная характеристика биполярного транзистора
Схемы включения биполярного транзистора
Существуют три схемы включения: схема с общим эмиттером, общей базой и общим коллектором (рис. 6.11 а, б, в соответственно).
Входной сигнал и выходной сигнал имеют общий контакт!

Рис. 6.11 – Схемы включения биполярного транзистора
Схемы включения полевых транзисторов
Существуют три схемы включения полевых транзисторов:
Схема с общим затвором, общим истоком, общим стоком (рис. 6.12 а, б, в соответственно).

Рис. 6.12 – Схемы включения полевого транзистора
Технические характеристики:
¾ Тип транзистора, маркировка;
¾  – коэффициент усиления по току (БП. тр-р);
– коэффициент усиления по току (БП. тр-р);
¾  – входное сопротивление (Ом);
– входное сопротивление (Ом);
¾ – максимально допустимый ток коллектора (стока) [A];
¾  – максимально допустимое напряжение
– максимально допустимое напряжение  (
( ), [B];
), [B];
¾ – максимально допустимое напряжение  (
( ), [B];
), [B];
¾  – максимально допустимая мощность (Вт).
– максимально допустимая мощность (Вт).
Назначение: усилители, генераторы электрических сигналов, логические элементы, цифровые устройства.
Вероятные вопросы тестирования по теме 6.3:
1.Биполярный транзистор это полупроводниковое устройство:
(а) с одним p-n переходом;
(б) с двумя p-n переходами;
(в) с двумя устойчивыми состояниями;
(г) с двумя полярными проводниками.
Ответ(б)
2.Коэффициент усиления по току биполярного транзистора:
(а) это отношение тока базы к току коллектора;
(б) это отношение тока эмиттера к току коллектора;
(в) это отношение тока коллектора к току базы;
(г)) это отношение тока эмиттера к току базы;
Ответ(в)
3. Схема представленная на рис

соответствует схеме включения БП транзистора:
(а) схема с общей базой
(б) схема с общим коллектором
(в) схема с общим эмиттером
(г) схеме с плавающим потенциалом эмиттера
Ответ(в)
4.Выходная характеристика биполярного транзистора это:
(а)
(б) 
(в) 
(г) 
Ответ(а)
5.Ток эмиттера равен:
(а) тока базы минус тока коллектора:
 ,
,
(б) ток базы плюс тока коллектора:
,
(в) тока базы равен току коллектора:
 ,
,
(г) тока эмиттера равен тока коллектора:
 ,
,
Ответ(б)
6.Входная характеристика биполярного транзистора это:
(а)
(б)
(в)
(г)
Ответ(б)
7.На рис представлена характеристика транзистора:
(а) выходная;(б) входная; (в) переходная; (г) предельная
Ответ(б)
Тиристор
Тиристор – полупроводниковое устройство с тремя и более p-n переходами (рис. 6.13).

а б
Рис. 6.13 – Структура тиристора управляемого по аноду(а) и управляемого по катоду(б)
Тиристор имеет два устойчивых состояния: 1 – открыт  ; 2 – закрыт
; 2 – закрыт  .
.
Существуют управляемые и неуправляемые тиристоры.
Условно графическое обозначение тиристоров (рис. 6.14)
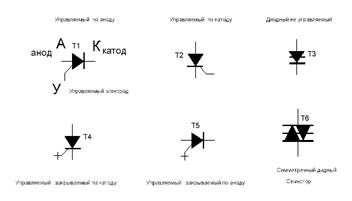
Рис. 6.14 – Условно графическое обозначение тиристоров
Схема включения неуправляемого тиристора представлена на рис.6.15.
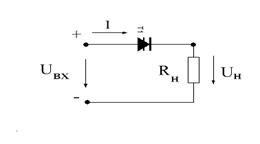
Рис. 6.15 – Схема включения неуправляемого тиристора
В исходном состоянии тиристор закрыт. Ток через тиристор не течет. При увеличении напряжения  и достижении некоторого порога включения
и достижении некоторого порога включения  тиристор открывается и ток через тиристор ограничивается только сопротивлением нагрузки.
тиристор открывается и ток через тиристор ограничивается только сопротивлением нагрузки.
Вольтамперная характеристика  неуправляемого диодного тиристора приведена на рис. 6.16.
неуправляемого диодного тиристора приведена на рис. 6.16.

Рис. 6.16 – Вольтамперная характеристика неуправляемого диодного тиристора
Если на тиристор подать напряжение обратного знака, то при некотором его значении  в тиристоре произойдет пробой. Тиристор выйдет из строя. Напряжение называют максимально допустимым обратным напряжением.
в тиристоре произойдет пробой. Тиристор выйдет из строя. Напряжение называют максимально допустимым обратным напряжением.
Чтобы закрыть диодный тиристор, необходимо уменьшить напряжение анод-катод до нуля.
Для практики важно иметь возможность управления включением тиристора. Для управления используется третий управляющий электрод (рис. 6.17 а).

а

б
Рис. 6.17 – Структура тиристора управляемого по катоду (а), вольтамперная характеристика управляемого тиристора (б)
Управляющее напряжение  положительной полярности подается между управляющим электродом и катодом (управление по катоду) или анодом (управление по аноду).
положительной полярности подается между управляющим электродом и катодом (управление по катоду) или анодом (управление по аноду).
Обычно управляющий сигнал это короткий импульса тока.
Вольтамперная характеристика  управляемого тиристора приведена на рис.6.17 б.
управляемого тиристора приведена на рис.6.17 б.
Чтобы закрыть управляемый тиристор, необходимо уменьшить напряжение анод-катод до нуля.
Чтобы закрыть управляемый закрываемый тиристор, необходимо подать импульс тока отрицательной полярности на управляющий электрод.
Схема включения управляемого тиристора представлена на рис. 6.18.

Рис. 6.18 – Электрическая схема включения управляемого тиристора
Технические характеристики:
¾ Тип тиристора, маркировка;
¾ – максимально допустимый прямой ток [A];
¾ – ток удержания [A];
¾ – максимально допустимое обратное напряжение [B];
¾ – напряжение включения, [B];
¾  – ток включения [A];
– ток включения [A];
¾ – допустимая мощность рассеивания на тиристоре (Вт).
Назначение: электронные ключи, генераторы электрических сигналов, регулируемые источники питания, частотные преобразователи, преобразователи напряжения (инверторы, конверторы).
Вероятные вопросы интернет тестирования по теме 6.4(тиристор):
1.На рис представлена вольтамперная характеристика:

(а) Диода;
(б) Тиристора;
(в) Биполярного транзистора;
(г) Полевого

