




1мысалы.Бу генераторының қыздырылмайтын бөлігі (коллектор, қосу бу құбыры). Кірудегі шама – бөлік кірісіндегі жұмыс ортаның температурасы, шығудағы - бөлік шығуындағы жұмыс ортаның температурасы. Бөліктегі жұмыс ортаның қысымы тұрақты, қоршаған ортаға жылу берілмейді деп есептелінеді.
Келесі белгілерді қолданамыз: Dc – жұмыс орта шығыны;  – жұмыс ортаның кірудегі және шығудағы энтальпиясы; Qм – металлдың бөлігіне әсер ететін жылулық ағын; Ic – бөліктегі жұмыс ортасының энтальпиясы; Iм – бөліктегі металл энтпльпиясы; Gc және Gм –бөліктегі жұмыс орта және металл массалары; iм – металл энтальпиясы; α2 – бөліктің ішкі H2 бетіне жылуберу коэффициенті; Θ’c және Θ’’c –бөліктің кірісімен шығысындағы жұмыс ортаның температурасы; Θм – металл температурасы; ср және см – металл және жұмыс ортаның меншікті жылу сыйымдылығы.
– жұмыс ортаның кірудегі және шығудағы энтальпиясы; Qм – металлдың бөлігіне әсер ететін жылулық ағын; Ic – бөліктегі жұмыс ортасының энтальпиясы; Iм – бөліктегі металл энтпльпиясы; Gc және Gм –бөліктегі жұмыс орта және металл массалары; iм – металл энтальпиясы; α2 – бөліктің ішкі H2 бетіне жылуберу коэффициенті; Θ’c және Θ’’c –бөліктің кірісімен шығысындағы жұмыс ортаның температурасы; Θм – металл температурасы; ср және см – металл және жұмыс ортаның меншікті жылу сыйымдылығы.
Жұмыс ортаның жылулық баланс теңдеуі

Металл үшін жылулық баланс теңдеуі

Келесі өрнектерді Ic = i’’c· Gc, Iм = iм· Gм, Qм = α2·H2· (Θ’’c - Θм),
∆i = с·∆ Θ, есепке алып, айнымалылырдың ауытқуына көшіп, стационарлы режимнің теңдеулерін қарастырып отырған теңдеулерден алып тастап, бөліктің сызықты моделінің дифференциалды теңдеулерін аламыз
 (1)
(1)
 (2)
(2)
(1), (2) теңдеулеріне Лаплас түрлендіруін қолданайық. Ол үшін теңдеулердің екі жағын да e-st өрнекке көбейтіп, 0-дан ∞-ке дейін интегралдаймыз, сонымен бірге функция мен оның туындысының бейнелері келесідей
y(t)÷Y(s), y'(t)÷sY(s) байланысатынын есепке аламыз.
Келесідей белгілеулерді. ∆Θ’’c ÷ Z(s), ∆Θ’c ÷Y(s), ∆Qм ÷X(s) қолданайық. Сонда

Екінші теңдеуден  .
.
Бірінші теңдеуден
 .
.
Dcсp шамасына бөліп, келесіні аламыз

Осыдан
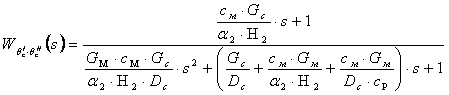
Уақыт тұрақтысы  физикалық жұмыс ортаның берілген шығынында бөлікті жұмыс ортамен толтыру уақытына сәйкес болып табылады және де шамасы кішкене болады. Практикалық есептеулерде оны нөлге тең деп алады, сонда беріліс функциясы келесі түрге түрленеді
физикалық жұмыс ортаның берілген шығынында бөлікті жұмыс ортамен толтыру уақытына сәйкес болып табылады және де шамасы кішкене болады. Практикалық есептеулерде оны нөлге тең деп алады, сонда беріліс функциясы келесі түрге түрленеді
 мұнда
мұнда  .
.
2 мысалы. Араластыру жылу алмастырғыш (шашырату коллекторы). Кірудегі шамалар коллектор кірісіндегі жұмыс ортаның шығыны мен температурасы болып табылады, шығудағы шама – жұмыс ортаның коллектор шығысындағы температурасы. Жұмыс ортаның шығудағы шығыны ортаның кірудегі және шашыратуға шығындарының қосындысына тең, шашыратылатын ортаның температурасы тұрақты деп есептелінеді.
Жұмыс орта үшін жылулық баланс теңдеуі

мұндағы  - коллектордың кірісіндегі және шығыстағы жұмыс орта шығындары,
- коллектордың кірісіндегі және шығыстағы жұмыс орта шығындары,  - судың шашыратылуға шығыны,
- судың шашыратылуға шығыны,  - шашыратылатын судың энтальпиясы.
- шашыратылатын судың энтальпиясы.
Алындағы мысалдағыдай, айнымалылардың ауытқуларына көшіп, стационарлы режимдегі теңдеулерді алып тастап, жұмыс орта үшін сызықты дифференциалды теңдеуді аламыз
 (8.3)
(8.3)
мұндағы  - стационарлы режимдегі коллектордың кірісіндегі және шығыстағы жұмыс орта шығындары,
- стационарлы режимдегі коллектордың кірісіндегі және шығыстағы жұмыс орта шығындары,  – стационарлы режимдегі жұмыс ортаның бөлік кірісіндегі энтальпиясы,
– стационарлы режимдегі жұмыс ортаның бөлік кірісіндегі энтальпиясы,  - стационарлы режимдегі шашыратылатын судың энтальпиясы. Металл үшін (2) теңдеуі қалады.
- стационарлы режимдегі шашыратылатын судың энтальпиясы. Металл үшін (2) теңдеуі қалады.
Лаплас түрлендіруін қолданып (2), (3) теңдеулерден, алдындағыдай қарапайымдылардан кейін әртүрлі каналдар бойынша беріліс функцияларды табуға болады
а)  каналы бойынша беріліс функциясын табайық:
каналы бойынша беріліс функциясын табайық:
 Осыдан
Осыдан  мұндағы
мұндағы  .
.
 шамасына бөліп, уақыт тұрақтысының
шамасына бөліп, уақыт тұрақтысының  шамасы азғантай деп есептеп, келесіні аламыз
шамасы азғантай деп есептеп, келесіні аламыз
 мұнда
мұнда 
б)  канал бойынша
канал бойынша  мұнда
мұнда  ;
;
в)  канал бойынша
канал бойынша  мұнда
мұнда  .
.
3 мысалы. Бу сыйымдылығы. Сыйымдылық кедергісі оның шығысында жинақталған және жұмыс ортаның энтальпиясы өтпелі процесс кезінде өзгермейді деп есептелінеді. Жұмыс ортаның қысымы сыйымдылықтан кейін реттегіш көмегімен тұрақты болып орнатылады. Сыйымдылық ішіндегі жұмыс ортаның қысымы әкелінетін ортаның шығынына әсер етпейді деп есептелінеді. Кірудегі шамалар кірістегі жұмыс ортаның шығыны мен қысымы болады, шығудағы шамалар – жұмыс ортаның шығыстағы шамасы мен сыйымдылықтағы қысым. Жұмыс орта үшін материалды баланс теңдеуі

Жинақталған кедергі арқылы жұмыс ортаның шығыны келесі өрнекпен анықталады

мұнда  - жұмыс ортаның кедергі алдында және оның кейінгі қысымдары. Айнымалылар ауытқуларына көшіп, сызықтандыруды өткізгеннен кейін келесілерді Gc =ρc ·V және
- жұмыс ортаның кедергі алдында және оның кейінгі қысымдары. Айнымалылар ауытқуларына көшіп, сызықтандыруды өткізгеннен кейін келесілерді Gc =ρc ·V және  есепке алып, жүйенің сызықты моделінің теңдеулерін аламыз
есепке алып, жүйенің сызықты моделінің теңдеулерін аламыз
 ; (6)
; (6)
 7
7
мұндағы V – бөліктегі жұмыс ортаның көлемі, ρc – ортаның тығыздылығы,  - стационар режиміндегі жұмыс ортаның кедергі алдында және оның кейінгі қысымы,
- стационар режиміндегі жұмыс ортаның кедергі алдында және оның кейінгі қысымы,  - стационар режиміндегі жұмыс ортаның шығыны. (9.4-9.5) теңдеулерге Лаплас түрлендіруін қолданғаннан кейін келесі каналдар арқылы
- стационар режиміндегі жұмыс ортаның шығыны. (9.4-9.5) теңдеулерге Лаплас түрлендіруін қолданғаннан кейін келесі каналдар арқылы  ,
,  ,
, 
 беріліс функцияларды аламыз. Студенттер осыны өздері орындауы керек.
беріліс функцияларды аламыз. Студенттер осыны өздері орындауы керек.
16 Өтпелі функция көмегімен модель параметрлерін анықтаудың графикалық идентификациялау әдістері Идентификациялау кезде қолданылатын қарапайым кіріс сигналы сатылы сигнал болып табылады. кез келген нақты сатылы сигнал идеалды сатылы сигналының тек қана аппроксимациясы болады. өлшеулерге шулар әсер еткен болса, шуларға фильтрлеу қолдану керек.Өтпелі процесс көмегімен идентификациялау тек қана стационарлы процестерге қолданылады. Мұның көмегімен жүйе жұмысын бұзбай өтпелі функцияларды жазып алуға болады. жүйенің беріліс функциясын анықтау үшін оның өтпелі функциясының графигін қолданамыз. Өтпелі функциялар көмегімен графикалық идентификациялау әдісті бірінші ретті процестерге қолданғанда дәлдігі жоғарырақ болады. Өтпелі процестің графигі берілсе, t0=0 болғанда x мәні а шамасына өзгереді. Объект теңдеуі осылай болады

осыдан Теңдеудің T және k параметрлерін графикалық әдіспен анықтаймыз.
 t ∞-ке ұмтылғанда y(t) = k*a болады. k коэффициенті шығудағы мәнімен кірудегі сигналдың амплитудасы арасындағы қатынасты көрсетеді. t = T десек, функция
t ∞-ке ұмтылғанда y(t) = k*a болады. k коэффициенті шығудағы мәнімен кірудегі сигналдың амплитудасы арасындағы қатынасты көрсетеді. t = T десек, функция
y (t)=b·  = b· (1-e-1) = b· (1-0.37) = 0.63·b.
= b· (1-e-1) = b· (1-0.37) = 0.63·b.
Сонымен, жүйенің өтпелі функциясы өзінің тұрақталған мәнінің 63% жеткендегі уақыт - ол T уақыт тұрақтысы.
г) Т ны келесі жолмен де анықтауға болады. Шешімнің туындысын анықтап, t ны 0-ге ұмтылдырамыз, сонда
 ,
, 
Сонда T=  . Сонымен, T шамасы - координаттар басынан жанама болатын хтің мәні. Бұл ең қарапайым, бірақ дәлдігі төмен шешім. Себебі жанаманы біз қолмен жүргіземіз Егер өтпелі функция τ уақытқа кешіксе, Лаплас түрлендіруі e-τs шамасы болады. Сонда өтпелі функция келесідей жазылады
. Сонымен, T шамасы - координаттар басынан жанама болатын хтің мәні. Бұл ең қарапайым, бірақ дәлдігі төмен шешім. Себебі жанаманы біз қолмен жүргіземіз Егер өтпелі функция τ уақытқа кешіксе, Лаплас түрлендіруі e-τs шамасы болады. Сонда өтпелі функция келесідей жазылады

Ал беріліс функция  .
.
17 Сызықты динамикалық объекттерді параметрлік идентификациялау. Невязка функционалының түрі. Идентификация есебін шешу жолы. Объектің кірісіндегі x(t) және шығысындағы y(t) функцияларын өлшеуге болатын болса, берілген объекттің моделін құрастыруға болады, x(t) және y(t) функцияларды бір-біріне сәйкестендіретін операторды табамыз. Объект сипаттамаларын көрсететін операторын А0 деп белгілейік, ол кірістегі x(t) сигналына шығудағы y(t) сигналын сәйкестіреді y(t)=A0{x(t)} А0 операторының жуықтап, осылай жазамыз yм(t) = A{x(t)}, мұнда A0 – объект сипаттамасы, A – модель сипаттамасы. А модель сипаттамасы оның нақты мәніне жақын болу керек. А және А0 операторларының құрылымы, кірістер саны әртүрлі болуы мүмкін және А0 операторы белгісіз. Сол үшін невязка функциясы қолданылады. Бұл функцияның келесідей қасиеттері бар:1) ρ(y,yм)>=0 кез келген y,yм үшін;2) ρ(y,yм)= 0, y=yм болса3) ρ(y,yм) – үздіксіз және төмен қарай ойылған.
y,yм барлық интервалда жақын болуы керек, сол үшін жақындық өлшемін енгіземіз  .ақпараттың маңызы әлтүрлі болса, онда
.ақпараттың маңызы әлтүрлі болса, онда  нормалау шартымен h(t)>0 салмақ функциясы енгізіледі.Сонда
нормалау шартымен h(t)>0 салмақ функциясы енгізіледі.Сонда  .h(t) функциясын таңдау ақпараттың маңыздылығымен анықталады.
.h(t) функциясын таңдау ақпараттың маңыздылығымен анықталады.
Дискретті болса Q функционалы келесі түрде жазылады
 мұнда hi >0 (i=1,…,N, ∑ hi =N) – i моментіндегі ақпарат салмағы.Q функционалы сәйкессіздік (невязка) функционалы деп аталады, ол А-дан тәуелді. Бұл функционалды минимумдағанда, А операторын белгілі операторлар класынан Ωтаңдаймыз.
мұнда hi >0 (i=1,…,N, ∑ hi =N) – i моментіндегі ақпарат салмағы.Q функционалы сәйкессіздік (невязка) функционалы деп аталады, ол А-дан тәуелді. Бұл функционалды минимумдағанда, А операторын белгілі операторлар класынан Ωтаңдаймыз.

Басқа сөзбен айтқанда, невязка осы операторда минималды. Идентификациялау есебін шешуге минимумдау процедурасын қолдану өте маңызды болып табылады. Идентификация сапасының критерийі орта жоғалтуларды көрсетеді. Олар неғұрлым кіші болса, соғұрлым идентификациялау сапасы жоғары болады. Идентификациялау алгоритмі жоғалтулар функциясымен және күйіне келтірілетін модельдің құрылымымен анықталады. қазірше Ωоператор класы туралы шешімді тек қана адам қабылдай алады. Сонымен бірге келесілерді есепке алу керек: басқару объект ретіндегі объекттің құрылымын; объект жұмысының механизмін; басқару мақсаттарын; басқару алгоритмін. Соңында идентификациялау есебінің тиімділігінің критерийі анықталуы керек.
18 Сызықты динамикалық объекттерді параметрлі емес идентификациялау. Корреляциялық функцияларды қолданудың қажеттілігі. Есепті шешу жоддарын атаңыз.
Параметрлі емес модель негізі үздіксіз функциямен анықталады, бірақ ол қатар түрімен берілсе, параметрлі жағдайды қарастырамыз. параметрлі емес модельді анықтау импульсті өтпелі функциямен жүргізіледі. Оның артықшылықтары: қарапайым, аз уақыт алады, сигналдарды қарапайым.Кемшілігі: дәлдігі төмен. стационарлы жағдайда бұл функция тек уақыттан тәуелді: g = g(t), 0 <= t <∞. Жүйеге x(t) әсер берілгенде y(t) сипаттамасы келесідей анықталады  . мұнда t < 0 болғанда x(t) = 0 болады.(Бұл өрнек жийма интегралы деп аталады). Бұл функцияның келесідей қасиеті бар
. мұнда t < 0 болғанда x(t) = 0 болады.(Бұл өрнек жийма интегралы деп аталады). Бұл функцияның келесідей қасиеті бар  . бұл қасиет жүйенің импульсті әсерден кейін өзінің бастапқы қалпына қайта оралатынын көрсетеді. Сондықтан, жоғарғы интегралдау шекті Tg деп алуға болады; t>Tg болғанда
. бұл қасиет жүйенің импульсті әсерден кейін өзінің бастапқы қалпына қайта оралатынын көрсетеді. Сондықтан, жоғарғы интегралдау шекті Tg деп алуға болады; t>Tg болғанда  , (әдетте α = 0.05). Енді жийма интегралын келесі түрде жаза аламыз
, (әдетте α = 0.05). Енді жийма интегралын келесі түрде жаза аламыз 
Oбъекттегі процестердің бұзылуынан объект кірісіне арнайы әсерлерді беру ыңғайсыз және жиі жағдайларда осы әсерлерге көрінбейтін бөгеттер қосылады, сондықтан объекттің динамикалық сипаттамаларын типтік кіріс сигналдары бойынша анықтау мүмкін болмайды. Сондықтан статистикалық әдіс колданылады. Идентификациялаудың статистикалық әдісін қолданғанда корреляциялық және спектрлік функциялар қарастырылады. Корреляциялық функцияларын бағалау үшін тәжірибелерді көп өткізіп, оның әрқайсысында кездейсоқ функциялардың жүзеге асыруларын жазып, содан кейін әр t кесіндісінде кездейсоқ функцияның орта мәнін анықтау керек.
Корреляциялық функцияны анықтаудың алгоритмі: 1). Зерттелетін кездейсоқ процестердің іске асырулары орталықтанады. 2). Алдын ала жиілік анализ өткізіледі. Оның нәтижесінде зерттелетін сигналдардағы жоғарғы fmax және төменгі fminгармоникалары алынады. 3). корреляцияланудың максималды уақыты анықталады:  . Корреляциялық функцияны қажетті дәлдікпен есептеу интервалы таңдалынады. Котельников теоремасы негізінде уақыт бойынша дискреттеу қадамы таңдалынады:
. Корреляциялық функцияны қажетті дәлдікпен есептеу интервалы таңдалынады. Котельников теоремасы негізінде уақыт бойынша дискреттеу қадамы таңдалынады:  . Дискреттеудің деңгейлер саны таңдалынады. 2% дәлдік үшін - 14 деңгей. 4). Есептелінетін координаттар саны анықталады:
. Дискреттеудің деңгейлер саны таңдалынады. 2% дәлдік үшін - 14 деңгей. 4). Есептелінетін координаттар саны анықталады:  . 5).
. 5). 
k=0,1,…, N,  – ығысу интервалы(k=0, …, N-1), N – корреляциялық функцияның өлшенетін координаталар саны, x –интервалдағы x-тің орта мәні. 5)тегі формула бойынша корреляциялық функцияның дәлдігі T интервалының ұзындығымен, корреляцияның τmaxмаксималды уақыт мәнімен, уақыт бойынша дискреттеудің ∆t қадамымен, 0<=τ<=τmaxинтервалында анықталатын корреляциялық функцияның ординаталары санымен анықталады. Корреляцияның максималды уақыт мәні деп келесі шартты |R(τ)|<= 0,05·Rmax қанағаттыратын τ мәнін түсінеміз.
– ығысу интервалы(k=0, …, N-1), N – корреляциялық функцияның өлшенетін координаталар саны, x –интервалдағы x-тің орта мәні. 5)тегі формула бойынша корреляциялық функцияның дәлдігі T интервалының ұзындығымен, корреляцияның τmaxмаксималды уақыт мәнімен, уақыт бойынша дискреттеудің ∆t қадамымен, 0<=τ<=τmaxинтервалында анықталатын корреляциялық функцияның ординаталары санымен анықталады. Корреляцияның максималды уақыт мәні деп келесі шартты |R(τ)|<= 0,05·Rmax қанағаттыратын τ мәнін түсінеміз.
19 Винер-Хопф теңдеуі, қай жолмен алынады, қандай объекттерді сипаттайды? Идентификация есебін шешуге осы теңдеуді қолдану. Винер-Хопф теңдеуі:  , бұл теңдеу мына жолмен анықталған:
, бұл теңдеу мына жолмен анықталған:  жийма интегралы өлшеу нәтижесінде объекттің кірісі мен шығысындағы кездейсоқ процестердің мәндері үлкен қателіктермен алынады, оларды тегістеу қажет. Объектке стационарлы кездейсоқ әсер берілгенде импульсті өтпелі функцияны статистикалық әдісімен анықтау үшін осы теңдеуге ұқсас, бірақ корреляциялық функцияларды байланыстыратын теңдеу болады. Осы теңдеуді шығарайық. Кірістің автокорреляциялық функциясы келесі:
жийма интегралы өлшеу нәтижесінде объекттің кірісі мен шығысындағы кездейсоқ процестердің мәндері үлкен қателіктермен алынады, оларды тегістеу қажет. Объектке стационарлы кездейсоқ әсер берілгенде импульсті өтпелі функцияны статистикалық әдісімен анықтау үшін осы теңдеуге ұқсас, бірақ корреляциялық функцияларды байланыстыратын теңдеу болады. Осы теңдеуді шығарайық. Кірістің автокорреляциялық функциясы келесі:  . Кіріс пен шығыстың өзара корреляциялық функциясы:
. Кіріс пен шығыстың өзара корреляциялық функциясы: 
Кірістегі және шығыстағы бөгеттердің корреляциясы жоқ, алεx(t), εy(t) бөгеттер тәуелсіз және ақ шу болады деп есептейміз. Сонда өлшеулердің қателіктерін есепке алмауға болады, яғни Rxx(τ) ≈ Ruu(τ), Rxy(τ) ≈ Ruv(τ).  . Осыдан Винер-Хопф теңдеуі шығады.
. Осыдан Винер-Хопф теңдеуі шығады.
Сонымен, динамикалық сипаттамаларды анықтау есебі келесі қадамдарға бөлінеді: 1). Объект кірісі және шығысындағы кездейсоқ процестерді жазып алу. 2.) Кіріс сигналының автокорреляциялық және кіріс пен шығыс сигналдарының өзара корреляциялық функцияларын есептеу. 3). TR параметрді анықтау. 4). Винер-Хопф интегралдық теңдеуін шешу. Теңдеуді шешудің әдістерінің біреуі – теңдеуді сызықты алгебралық теңдеулер жүйесі ретінде көрсету. Ол үшін дискретті уақытқа көшіп, интегралды қосынды ретінде жазамыз. Бастапқы интервал m тең интервалдарға t, 2t, …, mt бөлінеді және жуықтап интегралды қосынды ретінде жазамыз. Rx – квадратты симметриялық матрицасын аламыз:
Винер-Хопф теңдеуі нашар шартталған болады: корреляциялық функциялардың бастапқы мәндерінің кіші шамаға өзгеруі шешімдерін үлкен шамаға өзгертеді және корреляциялық функцияларының ақиқат мәндерінің орнына олардың бағалары қолданылады. Сондықтан Винер-Хопф теңдеуінің шешімдерінің қателіктері өте үлкен. Осы жолмен алынған импульсті өтпелі функциялардың орта квадраттар қателігінің шамасы өте аз, минимумға жақын болғанымен, олардың құндылығы немесе бағалылығы төмен, өйткені бұл функциялар объекттегі процестердің физикалық мағынасына сәйкес болмайды. Физикалық мағына тек қана тегістелген шешімдерде бар. Винер-Хопф теңдеуінің шешімдерін белгілі тегіс жұмыр функциялары бойынша жіктеу, тегістеу есебін жақсы шешеді. Бұл амалды Винер-Хопф теңдеуіне кіретін корреляциялық функцияларға да қолдануға болады. Сондықтан идентификациялау әдістерін практикада іске асырғанда аппроксимациялау және тегістеу процедуралары кең қолданылады.
20 Параметрлі емес идентификациялау есебін шешуге импульсты өтпелі функцияны қолданудың әдістері. Аппроксимациялау процедурасын қолдану. Параметрлі емес идентификациялау есебін шешуге импульсты өтпелі функцияны қолданудың әдістерi: импульсті өтпелі функияны тегістеу әдісі. Идентификациялау әдістерін практикалық іске асырғанда, тегістеу қасиеттері бар аппроксимациялау процедуралар кең тараған. Аппроксимациялау есебі – функцияны белгілі функциялар жүйесімен жуықтау.  Аппроксимациялайтын функциялардың түрі аппрроксимацияланатын функция туралы априолы ақпараты негізінде ізделінеді. Аппроксимациялау коэффициенттері кейбір алдын ала таңдалынған жуықтау критерийді минимумдайтындай таңдалынады. Tепе-теңдік, интерполяциялық, квадраттық жуықтауларды қолдануға болады. Скалярлы көбейтінділерді келесідей белгілеп
Аппроксимациялайтын функциялардың түрі аппрроксимацияланатын функция туралы априолы ақпараты негізінде ізделінеді. Аппроксимациялау коэффициенттері кейбір алдын ала таңдалынған жуықтау критерийді минимумдайтындай таңдалынады. Tепе-теңдік, интерполяциялық, квадраттық жуықтауларды қолдануға болады. Скалярлы көбейтінділерді келесідей белгілеп 
 бұл теңдеулерді жүйеге келтіріп оның шешімі жалғыз болуы үшін оның анықтауышы нөлге тең болмауы керек. Таңдалынған аппроксимациялайтын функциялар жүйесі сызықты-тәуелсіз болса ғана анықтауыш нөлге тең болмайды. Импульсті өтпелі функцияның дискретті мәндерін тегістеу. Оның ең қарапайым және бірінші пайда болған түрінің бірі Винер-Хопф теңдеуіне эквивалентті алгебралық жүйенің алынған шешімдерін аппроксимациялау болып табылады.
бұл теңдеулерді жүйеге келтіріп оның шешімі жалғыз болуы үшін оның анықтауышы нөлге тең болмауы керек. Таңдалынған аппроксимациялайтын функциялар жүйесі сызықты-тәуелсіз болса ғана анықтауыш нөлге тең болмайды. Импульсті өтпелі функцияның дискретті мәндерін тегістеу. Оның ең қарапайым және бірінші пайда болған түрінің бірі Винер-Хопф теңдеуіне эквивалентті алгебралық жүйенің алынған шешімдерін аппроксимациялау болып табылады.  ({φk(τ)} – кейбір ортогоналды аппроксиациялау функциялар жүйесі.) Аппроксимациялау коэффициенттері келесідей анықталады:
({φk(τ)} – кейбір ортогоналды аппроксиациялау функциялар жүйесі.) Аппроксимациялау коэффициенттері келесідей анықталады:  Аппроксимациялау функциялар жүйесіне қойылатын негізгі талаптар: - {φk(τ)} функциялары абсолютты интегралданатын болуы керек; - идентификациялау теңдеуінің шешімін жөндеу үшін {φk(τ)}жеткілікті тегіс болуы керек; - {φk(τ)}функциялар жүйесі сызықты-тәуелсіз болуы керек; - {φk(τ)} функциялар жүйесі ортогоналды болуы керек; - {φk(τ)} функциялар жүйесі полиномның N дәрежесі өскен сайын аппроксимациялау жылдамдалуын қамту керек; - {φk(τ)} функциялар күрделі емес есептеулер көмегімен қарапайым іске асырылуы керек. Импульсті өтпелі функцияны алдын ала аппроксимациялауда негізделген идентификациялау әдісі Фурье коэффициенттерін кірістегі және шығыстағы сигналдарды бақылау негізінде анықтауда болады. мұнда
Аппроксимациялау функциялар жүйесіне қойылатын негізгі талаптар: - {φk(τ)} функциялары абсолютты интегралданатын болуы керек; - идентификациялау теңдеуінің шешімін жөндеу үшін {φk(τ)}жеткілікті тегіс болуы керек; - {φk(τ)}функциялар жүйесі сызықты-тәуелсіз болуы керек; - {φk(τ)} функциялар жүйесі ортогоналды болуы керек; - {φk(τ)} функциялар жүйесі полиномның N дәрежесі өскен сайын аппроксимациялау жылдамдалуын қамту керек; - {φk(τ)} функциялар күрделі емес есептеулер көмегімен қарапайым іске асырылуы керек. Импульсті өтпелі функцияны алдын ала аппроксимациялауда негізделген идентификациялау әдісі Фурье коэффициенттерін кірістегі және шығыстағы сигналдарды бақылау негізінде анықтауда болады. мұнда  жийма интегралынан анықталады:
жийма интегралынан анықталады:  Жіктеудің белгісіз коэффициенттерін анықтау үшін нәтижесінде келесі жүйені аламыз:
Жіктеудің белгісіз коэффициенттерін анықтау үшін нәтижесінде келесі жүйені аламыз: 
Әдетте практикада N<<m, {φk(τ)} функциялар тегіс болғандықтан, осы жүйе жақсы шартталған. Бірақ аппроксимациялау полиномның N дәрежесін таңдау проблемасы жойылмайды.
Объект моделі келесідей дифференциалдық теңдеу түрінде берілген, бастапқы нольдік шарттарда. Оны беріліс функция түріндегі модельге түрлендіріңіз.
 ;
;  ;
;  ;
;
 ; Y(p)[
; Y(p)[  ;
;

22 Процесс келесі модельмен бейнеленеді:  . Модельді классификациялаңыз. Кластар анықтамаларын жазыңыз. Динамикалық, сызықты емес,уақыт бойынша үздіксіз, жинақталған параметрлері бар.
. Модельді классификациялаңыз. Кластар анықтамаларын жазыңыз. Динамикалық, сызықты емес,уақыт бойынша үздіксіз, жинақталған параметрлері бар.
Классификациялаудың негізінде φ оператордың ерекшеліктері жатады.
Процесте кез келген кездейсоқ әсерлер жоқ болса, процесс детерминерленген деп аталады; Ықтималдық процестер, кездейсоқ әсерлер бар модельдер стохастикалық модель деп аталады;
Егер φ оператордың түрі және оның p параметрлері уақыт бойынша өзгермесе, онда модель стационарлы болып табылады. Егер де модель параметрлері уақыт бойынша өзгеретін болса модель параметрлік стационарлы емес. y= φ(p,t,x).
Егер жүйе күйі өзгермесе, жүйеде тепе-теңдік орындалса, жүйе моделі статикалық деп аталады. Динамикалық модель объекттің күйінің уақыт бойынша өзгеруін бейнелейді.
Егер модель операторының өрнегінде сызықты емес операциялар болса, модель сызықты емес болады, сызықты емес операциялар болмаса– сызықты.
Егер де процесс айнымалылары уақыт бойынша, сонымен бірге кеңістік бойынша да (немесе тек кеңістік бойынша) өзгеретін болса, онда модель таратылған параметрлері бар модель деп аталады.
Егер объекттің кеңістік бойынша өзгеруін есепке алмасақ, модель – жинақталған параметрлері бар модель болады. Олар үшін масса мен энергия бір нүктеде жинақталған сияқты.
Үздіксіз модельдер жүйелердегі үздіксіз процестерді бейнелейді. Дискретті модель объект жүріс-тұрысын дискретті уақыттың аралықтарында болжай алмайды. Егер үздіксіз процестермен бірге объектте дискретті процестер бар екендігін көрсету керек болса, дискретті-үздіксіз модельдер қолданылады.
23  модель үшін идентификациялау есебін айтып беріңіз, невязка функционалы мен модель параметрлерін анықтауға негізделген сызықты алгебралық теңдеулер жүйесінің жалпы түрін жазыңыз. Бірөлшемді жағдайда кіріс x = x(t) және шығыс y = y(t) айнымалылар арасындағы байланыс қарапайым дифференциалдық теңдеуімен сипатталады.
модель үшін идентификациялау есебін айтып беріңіз, невязка функционалы мен модель параметрлерін анықтауға негізделген сызықты алгебралық теңдеулер жүйесінің жалпы түрін жазыңыз. Бірөлшемді жағдайда кіріс x = x(t) және шығыс y = y(t) айнымалылар арасындағы байланыс қарапайым дифференциалдық теңдеуімен сипатталады.  , бұл жерде
, бұл жерде  . теңдеуге объекттің бақылауларын - Xt, Yt функцияларын қойғанда, теңдеудің оң және сол жақ бөліктерінің айырмашылығының орта квадраты ретінде сәйкессіздік функцияны құрастырамыз:
. теңдеуге объекттің бақылауларын - Xt, Yt функцияларын қойғанда, теңдеудің оң және сол жақ бөліктерінің айырмашылығының орта квадраты ретінде сәйкессіздік функцияны құрастырамыз:  функциясының барлық белгісіз параметрлері бойынша туындыларын нөлге теңестіріп, сызықты теңдеулер жүйесін аламыз; осы жүйенің шешімі минимумдау есебінің шешімі болады.
функциясының барлық белгісіз параметрлері бойынша туындыларын нөлге теңестіріп, сызықты теңдеулер жүйесін аламыз; осы жүйенің шешімі минимумдау есебінің шешімі болады.
 ;
;  ;
;  ;
; 
24. Өлшеулер туралы {xi, yi}, i=1,2,…,N ақпарат бар. y=a0+a1x1+a2x2 модель үшін идентификациялау есебін айтып беріңіз, параметрлерін анықтауға негізделген сызықты алгебралық теңдеулер жүйесін жазыңыз.
 ;
;
 ;
;
 ;
;
 ;
;

N  ;
;
 ;
;
 ;
;
25. Бірінші ретті объект үшін модель келесідей таңдалынған:
[0,1] аралығында объектке x(t)=t сигнал беріліп, шығудағы сигнал 

