




Конические зубчатые передачи применяют при пересекающихся или скрещивающихся осях (гипоидная передача). Межосевой угол ∑ может изменяться в широком диапазоне значений (10° < ∑ < 170°), но наибольшее распространение имеют ортогональные конические передачи с углом ∑ = 90°.
Конические зубчатые передачи по сравнению с цилиндрическими имеют большую массу и габариты, сложнее в изготовлении, а также монтаже, так как требуют точной фиксации осевого положения зубчатых колес.
Наибольшее распространение имеют конические передачи с прямыми и криволинейными зубьями; последние постепенно вытесняют передачи с тангенциальными зубьями. Конические зубчатые колеса с криволинейными зубьями могут иметь круговую, эвольвентную и циклоидальную линию зубьев; наиболее распространенные колеса с круговыми зубьями.
Конические передачи с криволинейными зубьями по сравнению с прямозубыми имеют большую нагрузочную способность, работают более плавно и, следовательно, динамические нагрузки и шум при их работе меньше. Допуски для конических и гипоидных передач регламентированы стандартом, согласно которому установлено двенадцать степеней точности и соответствующие нормы точности.
Предельные окружные скорости для конических прямозубых (непрямозубых) колес имеют следующие величины: при 6-й степени точности — до 12 (20) м/с, 7-й степени — до 8 (10) м/с, 8-й степени — до 4 (7) м/с, 9-й — до 1,5 (3) м/с.
Расчет геометрии конических прямозубых передач регламентирован ГОСТом. На рис. 43 показаны основные геометрические параметры прямозубого конических колеса: Re, R — внешнее и среднее конусное расстояния; b — ширина зубчатого венца; d, de — средний и внешний делительный диаметры; dаe , dfe — внешние диаметры вершин зубьев и впадин; δ — угол делительного конуса; hae, hfe — внешняя высота делительной головки и ножки зуба; θa = θf = θ — угол делительной головки; и ножки зуба.
 Углы головки и ножки зуба сделаны одинаковыми для того, чтобы образующая конуса вершин зубьев одного колеса была параллельна образующей конуса впадины второго колеса, в результате чего радиальный зазор по длине прямого зуба будет постоянным (поэтому на рис. 43 вершины конусов не совпадают).
Углы головки и ножки зуба сделаны одинаковыми для того, чтобы образующая конуса вершин зубьев одного колеса была параллельна образующей конуса впадины второго колеса, в результате чего радиальный зазор по длине прямого зуба будет постоянным (поэтому на рис. 43 вершины конусов не совпадают).
По приведенным выше параметрам определяют остальные размеры колес и передачи, в частности:
угол конуса вершин зубьев δ a = δ + θ; угол конуса впадин δ f = δ — θ.
Рис. 43. Геометрия прямозубого конического колеса.
У конических колес высота, толщина зубьев и окружной шаг по длине зуба неодинаковы, поэтому различают два окружных модуля:
т — средний делительный окружной модуль, причем d = mz, где z — число зубьев колеса;
те — внешний делительный окружной модуль, причем de = mez.
Внешний и средний модули пропорциональны соответствующим конусным расстояниям, поэтому
me = mRe / R.
Углы делительных конусов ортогональных передач легко определяются в зависимости от числа зубьев ведущего и ведомого колес, а следовательно, от передаточного числа передачи:
tg δ1, = d 1 / d 2 = z 1 /z 2 = 1 / u или и = ctg δ1, = tg δ2.
Ширину зубчатого венца b по стандарту рекомендуется принимать
b £0,3 Re или b £10 те;
вычисленное значение округляется до целого числа, а при проектировании стандартных редукторов значения b принимаются по стандарту.
Кроме ширины венца b указанный стандарт на ортогональные конические передачи для редукторов устанавливает номинальные значения внешнего делительного диаметра колеса de 2(в основном определяющего габариты редуктора) и номинальные значения передаточных чисел и (от и = 1до и = 6,3). В приложении к ГОСТу имеется таблица, в которой для каждого стандартного значения передаточного числа и указаны взаимно согласованные значения de 2 и b.
Для прямозубых конических передач рекомендуется и £ 3, для передач с криволинейными зубьями и £ 6,3; число зубьев меньшего колеса рекомендуется z 1 = 18...30.
 Силы в конической передаче. При силовом расчете конических передач полагают, что равнодействующая сил нормального давления Fn приложена в среднем сечении зуба, а силами трения, как и ранее, пренебрегают.
Силы в конической передаче. При силовом расчете конических передач полагают, что равнодействующая сил нормального давления Fn приложена в среднем сечении зуба, а силами трения, как и ранее, пренебрегают.
Рис. 44. Силы в конической передаче.
Разложим силу Fn на три взаимно перпендикулярные составляющие по реальным направлениям (рис. 44), в результате чего получим:
окружная сила на шестерне и колесе Ft 1 = 2 Т 1 / d 1= Ft 2;
радиальная сила на шестерне, численно равная осевой силе на колесе, Fr 1 = Ft 1 tgα*cosδ1 = Fa 2.
осевая сила на шестерне, численно равная радиальной силе колеса, Fa 1 = Ft 1 tgα*sinδ1 = Fr 2.
Критерии работоспособности и методика расчетов на прочность конических и цилиндрических передач аналогичны. Поэтому расчет зубьев конических передач сводится к расчету зубьев эквивалентной цилиндрической передачи с учетом установленного опытным путем коэффициента понижения нагрузочной способности конической передачи, равного 0,85. Модуль зубьев эквивалентного цилиндрического колеса принимается для прочностных расчетов равным модулю т в среднем сечении зуба, а диаметр делительной окружности эквивалентного колеса принимают равным диаметру среднего дополнительного конуса; эквивалентное число зубьев будет определяться по ранее выведенным формулам, а передаточное число эквивалентных колес uv будет равно
uv = zv 2 / zv 1 = z 2 cos δ1 / z 1 cos δ2 = u tg δ2 = u 2.
так как при ∑ = 90° cos δ1 = sin δ2, а tg δ2 = и,
Проверочный расчет зубьев конических прямозубых передач на контактную усталость считают по формуле:
σН = Z  £ [σН],
£ [σН],
где Z = 462*103 Па1/2 для стальных колес.
Формула для проектного расчета прямозубых конических передач на контактную усталость выглядит следующим образом:
d 1 = Kd  ,
,
где для предварительных расчетов стальных колес Kd = 7700 Па1/3, КHβ ≈ 1,3, коэффициент ширины колеса относительно среднего диаметра шестерни ψ bd ≈ 0,166  (при наиболее распространенном ψ bd = 0,285).
(при наиболее распространенном ψ bd = 0,285).
Основным видом проектного расчета закрытых конических передач с низкой и средней твердостью зубьев является расчет на контактную усталость активных поверхностей зубьев, а расчет на усталость зубьев при изгибе применяется как проверочный. Исключением являются передачи с высокой твердостью активных поверхностей зубьев (Н > 50 HRCЭ, их нагрузочная способность лимитируется изгибной прочностью); параметры таких передач определяют из расчета зубьев на изгиб, причем основным расчетным параметром является модуль.
Проектным расчетом открытых передач также является расчет на усталость зубьев при изгибе.
Формула проверочного расчета на изгиб прямозубых конических передач имеет вид
σ F = (YF wFt) / (0,85 m) £ [σ f ],
где YF — коэффициент формы зуба, определяемый по эквивалентному числу зубьев zv;
параметр wFt = 2 T1KFβKFv. / (d1 b); т — средний модуль.
Формула проектного расчета на изгиб прямозубых конических передач имеет вид
т = К т 
где Кт = 1,4; коэффициент неравномерности нагрузки KFβ определяется по графику KFβ - ψ bd; числом зубьев шестерни задаются, обычно z 1 = 18...30; ψ bd ≈ 0,166 (расчет ведется по шестерне).
Допускаемые напряжения для расчетов конических передач определяются так же, как для цилиндрических.
Конические передачи с тангенциальными и криволинейными зубьями приближенно рассчитывают по тем же формулам, что и прямозубые, но по нормальному среднему модулю и с введением в знаменатель подкоренного выражения коэффициента Kk, учитывающего большую прочность этих зубьев. На основании опытных данных KHk = 1,5 — при расчетах зубьев на контактную усталость; KFk = 1,0 — при расчетах зубьев на изгиб. Коэффициент Kk вводится вместо коэффициента 0,85.
Гипоидная и спироидная передачи. Зубчатые передачи со скрещивающимися осями — гиперболоидные, так как их начальные конические поверхности, строго говоря, являются частью гиперболоидов вращения. У гипоидной передачи шестерня обычно является коническим колесом с тангенциальными или круговыми зубьями; у спироидной передачи коническая шестерня-червяк имеет винтовые зубья.
Достоинства гипоидных и спироидных передач заключаются в следующем: валы и их опоры для обоих колес могут быть выведены за пределы передачи в обоих направлениях, что исключает консольные нагрузки на валы; передачи характеризуются высокой нагрузочной способностью и плавностью работы.
Характерный недостаток гиперболоидных передач — повышенное скольжение активных поверхностей зубьев, вызванное смещением осей колес, отсюда сравнительно невысокий КПД и склонность к заеданию; такие передачи смазывают специальным противозадирным так называемым гипоидным маслом, содержащим специальные присадки.
3.2. Червячные передачи, их характеристика и область применения. Виды червяков. Стандартные параметры червячной передачи. Материалы колеса и червяка. Критерии работоспособности и виды отказов.
ЧЕРВЯЧНЫЕ ПЕРЕДАЧИ
Червячная передача — это механизм для передачи вращения зацеплением с непосредственным контактом витков червяка и зубьев червячного колеса (рис. 45). Червяк 1 — это винт с трапецеидальной или близкой к ней по форме резьбой. Червячное колесо 2 является косозубым зубчатым колесом с зубьями особой дуговой формы. Такая форма зубьев обеспечивает увеличение длины и прочности зубьев на изгиб.
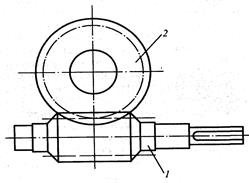 Рис. 45.Схема червячной передачи.
Рис. 45.Схема червячной передачи.
Червячные передачи применяют при необходимости передачи движения между перекрещивающимися (как правило, взаимно перпендикулярными) валами. При вращении червяка его витки плавно входят в зацепление с зубьями колеса и приводят его во вращение. Передачи используют в станках, автомобилях, подъемно-транспортных и других машинах.
Достоинства червячных передач: 1) возможность получения большого передаточного числа в одной ступени; 2) плавность и малошумность работы; 3) повышенная кинематическая точность.
Недостатки червячных передач: 1) низкий КПД; 2) необходимость изготовления зубьев колеса из дорогих антифрикционных материалов; 3) повышенные требования к точности сборки, необходимость регулировки; 4) необходимость специальных мер по интенсификации теплоотвода.
По форме тела червяки разделяют на: цилиндрические, глобоидные и тороидные. Наибольшее применение находят цилиндрические червяки как более простые в изготовлении и обеспечивающие достаточно высокую нагрузочную способность.
Профиль витков червяка можно варьировать, так как червячные колеса изготовляют инструментом, являющимся аналогом червяка. По форме боковой поверхности витка червяки подразделяют на архимедовы (обозначение ZA), конволютные (ZN), эвольвентные (ZJ), нелинейчатые с поверхностью, образованной конусом (ZK), и с вогнутым профилем витка (Z Т).
При невысоких требованиях к нагрузочной способности и ресурсу в условиях мелкосерийного производства применяют архимедовы и конволютные червяки. Витки архимедовых червяков имеют прямолинейный профиль в осевом сечении, в торцовом сечении витки очерчены архимедовой спиралью (рис.46, а, г). Витки конволютных червяков имеют прямолинейный профиль в сечении, нормальном к направлению витка, в торцовом сечении витки очерчены удлиненной эвольвентой (рис.46, б, д). Нарезают архимедовы и конволютные червяки на универсальных токарно-винторезных станках. Для шлифования архимедовых червяков требуется круг, очерченный сложной кривой в осевом сечении, что ограничивает их применение. Шлифование конволютных червяков конусными кругами с прямолинейными образующими на обычных резьбошлифовальных станках приводит к небольшому искривлению прямолинейного профиля витка, поэтому такие червяки называют нелинейчатыми. Червячные фрезы для нарезания червячных колес шлифуют тем же способом, поэтому получают правильное зацепление.
Эвольвентные червяки представляют собой косозубые колеса с малым числом зубьев и очень большим их углом наклона (рис. 46, в, е). Профиль зуба в торцовом сечении очерчен эвольвентой. Эвольвентные червяки с высокой твердостью поверхности шлифуют плоской стороной шлифовального круга. Червяки с вогнутым профилем витка шлифуют торовой поверхностью вращения.
Критерии работоспособности червячных передач:
Причины выхода из строя червячных передач (в порядке убывания частоты проявления отказов).
1. Износ зубьев колеса ограничивает срок службы большинства передач. Интенсивность износа увеличивается при загрязненном смазочном материале, при неточном монтаже зацепления, при повышенной шероховатости рабочей поверхности червяка.
2. Заедание при твердых материалах колес происходит в ярко выраженной форме со значительными повреждениями поверхностей и последующим быстрым изнашиванием зубьев частицами колеса, приварившимися к червяку. В случае применения мягких материалов колес заедание проявляется в менее опасной форме, возникает перенос («намазывание») материала колеса на рабочую поверхность червяка.
 3. Усталостное выкрашивание наблюдается только на поверхности зубьев колес, изготовленных из материалов, стойких к заеданию.
3. Усталостное выкрашивание наблюдается только на поверхности зубьев колес, изготовленных из материалов, стойких к заеданию.
4. Пластическая деформация рабочих поверхностей зубьев колеса возникает при действии больших перегрузок.
5. Усталостная поломка зубьев колеса происходит в результате значительного их износа. Усталостная поломка витков или тела червяка и усталостный разрыв венца колеса по впадине зуба возникают редко.
Рис. 46. Основные типы червяков.
Материалы червяка и червячного колеса:
Изготовление и червяка, и колеса из твердых материалов не обеспечивает достаточной износостойкости и сопротивления заеданию. Поэтому одну из деталей передачи выполняют из антифрикционного материала, хорошо сопротивляющегося заеданию и износу.
Для червяка характерны относительно малый диаметр и значительное расстояние между опорами, его жесткость и прочность обеспечивают изготовлением его из стали. Поскольку при приработке червяк служит в качестве формообразующего элемента, прочность и твердость его поверхности должны быть выше соответствующих свойств колеса.
Материалы червяка делят на группы: 1) нетермообрабатываемые, 2) улучшаемые, 3) поверхностно-закаливаемые, 4) цементуемые под закалку, 5) подвергаемые азотированию и хромированию.
Наиболее применяемый материал — сталь 18ХГТ, твердость поверхности после цементации и закалки 56...63НRСЭ. Используют также стали 40Х, 40ХН, 35ХГСА с поверхностной закалкой до твердости 45...55НRСЭ. Во всех этих случаях необходимы шлифование и полирование червяка. Применение азотируемых сталей 38Х2МЮА, 38Х2Ю позволяет исключить шлифование червяка. Червяки, улучшенные и без термообработки применяют лишь во вспомогательных малонагруженных передачах.
Червячное колесо обычно выполняют составным: венец — из антифрикционных, относительно дорогих и малопрочных материалов; центр — из стали; при небольших нагрузках — из чугуна.
Материалы венцов червячных колес разделяют на группы (в порядке снижения сопротивляемости заеданию и усиленному износу): 1) оловянистые бронзы (БрО10Ф1, БрО10Н1Ф1, БрО5Ц5С6 и др.); 2) безоловянистые бронзы и латуни (БрА9ЖЗЛ, БрА10Ж4Н4Л, ЛАЖМц66-6-3-2 и др.); 3) чугуны (СЧ15, СЧ20 и др.). Чем выше содержание олова в бронзе, тем она дороже, но тем выше сопротивление заеданию.
Основные параметры, геометрия червячных передач:
Мощность p 1на червяке при длительной работе обычно составляет около 30 кВт, при повторно-кратковременном режиме — до 200 кВт. Передаточные числа выбирают от 8 до 80, (в кинематических передачах - до 1000), а КПД не превышает 0,82.
Основные геометрические размеры червяка представлены на рис. 47. В червячных передачах угол профиля α обычно принимают равным 20°. У архимедовых червяков его определяют в осевом сечении, у конволютных и эвольвентных — в нормальном сечении (αn =20°), у нелинейчатых α находят как угол конуса производящей поверхности. Для передач с вогнутым червяком угол профиля в осевом сечении витка червяка, измеренный на делительном диаметре, равен 22°.
Расстояние между одноименными точками боковых сторон смежных витков червяка, измеренное параллельно оси, называют шагом р червяка. Отношение р/п называют модулем т.
Червячные колеса нарезают фрезами, режущие кромки которых при вращении образуют поверхности, идентичные с поверхностью витков червяка. В целях сокращения номенклатуры зуборезного инструмента стандартизованы модули и коэффициенты диаметра червяка: q = d1 / т.
Делительный диаметр червяка d1 = q m.
Число заходов червяка z 1 выбирают из установленных ГОСТ значений 1, 2 или 4. Передачи большой мощности не выполняют с однозаходными червяками из-за низкого КПД.
Высота головки ha 1 и ножки hf 1 витков.
Угол γ подъема витка червяка на делительном диаметре
tg γ = p Z1 / π d1 = (p * z 1 ) / π d1 = (m * z 1 ) / d1 = z 1 / q
где p Z1 = p * z 1 — ход витка червяка.
Диаметры вершин и впадин: da 1 = d1 + 2 ha 1.; df 1 = d1 — 2 hf 1.
Длину нарезанной части червяка b 1 определяют из условия нахождения в зацеплении максимально возможного числа зубьев колеса. Для шлифуемых и фрезеруемых червяков во избежание завалов на боковых поверхностях витков червяка на входе и выходе шлифовального круга (фрезы) из впадин длину нарезанной части увеличивают на 3 т. У быстроходных червяков для исключения дисбаланса отношение b 1/(π * m) принимают равным целому числу.


Рис. 47. Геометрические параметры червяка. Рис. 48. Геометрические параметры червячного колеса.
Минимальное число зубьев червячных колес z 2 min составляет для кинематических передач 17, в силовых передачах z 2min = 28. Наиболее желательно для силовых передач z2 = 30...90.
Делительный диаметр колеса (рис. 48) равен d 2 = m * z 2.
Диаметры вершин da 2и впадин df 2определяют в среднем сечении колеса; для колес, нарезанных без смещения режущего инструмента, они равны:
da 2 = d 2 + 2 h*a 1 m; df 2 = d2 — 2 h*f 1 m.
Ширина колеса b2 < 0,75 da l(при z1 = 1 или z1 = 2), b2 < 0,67 da l(при z1 = 4). Увеличивать ширину червячного колеса нецелесообразно, так как длина контактных линий и передаваемая нагрузка увеличиваются при этом незначительно.
Межосевое расстояние передачи в общем случае обозначают через aw, для передачи без смещения — через a. Можно выразить a через диаметры червяка d1 и червячного колеса d2
a = (d1 + d2) / 2 = 0,5m(q + z2).
Значения межосевых расстояний стандартизованы в целях унификации корпусных деталей.
Большинство передач выполняют со смещением режущего инструмента. Передачи со смещением выполняют для получения стандартного межосевого расстояния или изменения числа зубьев колеса (на 1-2 зуба). Положительное смещение приводит к увеличению межосевого расстояния:
aw = а + т ∙ х, aw = 0,5 т(q + z2 + 2 х).
При этом коэффициент смещения инструмента
x = aw / т — 0,5 (q + z 2 ).
Рекомендуется коэффициент смещения x принимать в диапазоне 0...1 (допускается x в пределах ±1). Предпочтительно использовать положительные смещений, при которых несколько повышается нагрузочная способность передачи. Для передач с вогнутым профилем витка червяка (ZT) назначают большие коэффициенты смещения (l,0 £ x £ l,4), предпочтительно x = 1,1... 1,2. Значительное положительное смещение для этих передач является дополнительным фактором повышения нагрузочной способности.
 Силы в червячном зацеплении принимают приложенными в полюсе зацепления и направляют по трем взаимно перпендикулярным осям (рис. 49).
Силы в червячном зацеплении принимают приложенными в полюсе зацепления и направляют по трем взаимно перпендикулярным осям (рис. 49).
Окружная сила на колесе, равная по модулю осевой силе на червяке,
Ft 2 = Fa 1 = 2000 T 2/ d 2.
Окружная сила на червяке равна осевой силе на колесе:
Ft 1 = Fa 2 = 2000 T 1/ dw 1.
Радиальная сила, раздвигающая червяк и колесо,
Fr l = Fr 2 = Ft 2tg α.
В этих зависимостях T 2 и T 1— вращающие моменты на валах колеса, червяка, Н∙м; α — угол профиля витка червяка; d 2, dw 1 — линейные размеры, мм.
Рис. 49. Силы в червячном зацеплении.
3.3. Планетарные передачи, их характеристика и область применения. Основные параметры, достоинства и недостатки передачи.
Планетарные передачи
Планетарными называют передачи, имеющие колеса с перемещающимися геометрическими осями.
На рис. 50., а - в изображена схема четырехзвенной простейшейпланетарной зубчатой передачи, состоящей из центрального вращающегося колеса 1 с неподвижной геометрической осью; сателлитов 2, оси которых перемещаются; неподвижного колеса 3 с внутренними зубьями; вращающегося водила h, на котором установлены сателлиты. При работе планетарной передачи сателлиты 2 совершают сложное (плоскопараллельное) движение.
Ведущим в планетарной передаче может быть либо центральное колесо, либо водило. При заданной угловой скорости ведущего звена угловые скорости всех остальных звеньев получают вполне определенные значения, поэтому рассматриваемая планетарная передача имеет постоянное передаточное отношение.
Если в планетарной передаче (рис. 50) освободить неподвижное колeco 3 и сообщить ему дополнительное вращение, то рассматриваемый механизм превратится в дифференциальный, передаточное отношение которого будет одновременно зависеть от угловых скоростей двух звеньев.
Планетарные передачи могут быть одно- и многоступенчатыми.
Достоинства планетарных передач заключаются в малой массе игабаритах конструкций по сравнению с не планетарными зубчатыми передачами, а также в возможности получения больших передаточных чисел (до 1000 и более). Использование в передаче нескольких равномерно расположенных сателлитов распределяет передаваемую мощность на несколько потоков и позволяет уравновесить радиальные нагрузки на валы и их опоры.
Недостатки планетарных передач: повышенные требования к точности изготовления и сборки конструкции, а также сравнительно невысокий КПД у многоступенчатых передач.
Планетарные зубчатые механизмы широко распространены в машиностроении и приборостроении.
Для определения передаточного отношения и изображенной на рис. 50 передачи воспользуемся методом обращения движений (в применении к планетарным передачам он называется методом Виллиса).
Пусть ведущим звеном передачи является зубчатое колесо 1, вращающееся с угловой скоростью ω 1; угловую скорость водила обозначим ωh.
 Рис. 50. Простейшая планетарная передача.
Рис. 50. Простейшая планетарная передача.
Мысленно сообщим всему механизму вращательное движение противоположно направлению вращения водила с угловой скоростью ωh. При этом водило остановится и планетарная передача превратится в передачу с неподвижными геометрическими осями, причем ведущее колесо 1 будет вращаться с угловой скорость ω 1 — ωh, а колесо 3 — с угловой скоростью ωh.
При остановленном водиле построим график окружных скоростей точек вертикального радиуса колес, как показано на рис. 50, а. Из этого графика видно, что окружные скорости всех колес будут равны, т. е. va = vb.
Обозначив радиусы колес 1 и 3 r 1и r 3, получим va = (ω 1 — ωh) r 1, vb = ωh r 3.
Приравняв правые части этих равенств, учитывая, что радиусы зубчатых колес пропорциональны числам их зубьев, получим формулу для определения передаточного отношения и планетарной передачи (при ведущем колесе 1):
и = ω 1 / ωh = 1 + z 3/ z 1,
где z 1. z 3 — числа зубьев центрального и неподвижного колес.
В подавляющем большинстве случаев на практике применяют планетарные передачи (с постоянным передаточным отношением), составленные из цилиндрических зубчатых колес. Конические зубчатые колеса используют преимущественно в дифференциальных механизмах.
Конический дифференциал. Этот механизм широко используется в автомобилях, тракторах, металлорежущих станках, счетно-решающих устройствах. На рис. 51 изображена схема автомобильного дифференциала. Он состоит из конических зубчатых колес 6 и 7, которые насажены на ведущие полуоси автомобиля и сцепляются с сателлитом 4, свободно сидящим на оси, закрепленной во вращающемся водиле h. Водило приводится в движение от двигателя с помощью конической зубчатой пары 3 и 2.

Рис. 51. Автомобильный дифференциал.
Если автомобиль движется по прямой и ровной дороге и силы сцепления колес 1 и 5 с дорогой одинаковы, то угловые скорости полуосей также будут одинаковы и равны угловой скорости водила. При движении автомобиля на закруглениях колесо, движущееся по внешней кривой, проходит больший путь, чем колесо, движущееся по внутренней кривой. Если оба колеса автомобиля закрепить на одной оси, то неизбежно скольжение покрышек по дороге и их повышенный износ. При наличии дифференциала сателлит 4 обкатывает колеса 6 и 7 и одновременно вращается вокруг своей оси, в результате чего угловые скорости полуосей и ведущих колес автомобиля окажутся различными и скольжение покрышек по дороге будет предотвращено.
3.4. Волновая передача. Назначение, типы. Достоинства и недостатки. Критерии работоспособности.
Волновые передачи
Волновыми называют механические передачи, содержащие контактирующие между собой гибкое и жесткое звенья и обеспечивающие передачу и преобразование движения путем деформирования гибкого звена. Цель деформации – получить большое число одновременно зацепляющихся зубьев и повысить нагрузочную способность передачи. Волновые передачи бывают фрикционные, зубчатые и винтовые.
 Принцип передачи и преобразования движения путем волнового деформирования одного из звеньев механизма впервые предложен в 1947 г. инженером А. И. Москвитиным.
Принцип передачи и преобразования движения путем волнового деформирования одного из звеньев механизма впервые предложен в 1947 г. инженером А. И. Москвитиным.
Рис. 52. Фрикционная волновая передача.
На рис. 52 представлены две схемы фрикционного варианта волновой передачи, состоящей из жесткого колеса b, гибкого колеса q и роликового генератора волн h, причем наружный диаметр недеформированного гибкого колеса несколько меньше внутреннего диаметра жесткого колеса; охватывающий размер по роликам сделан таким, чтобы деформированное гибкое колесо было прижато роликами к жесткому колесу. В схеме а с ведомым валом соединено жесткое колесо, а в схеме б — гибкое; в обеих схемах с ведущим валом соединен двухволновой генератор. При вращении генератора волны контакта перемещаются по окружности гибкого колеса, прижимают его к жесткому колесу и за счет сил трения вызывают вращение ведомого звена. Если обкатка гибкого колеса по жесткому происходит без проскальзывания, то за один оборот генератора ведомое звено повернется на угол, соответствующий разности длин окружностей контактирующих поверхностей жесткого и гибкого колеса, следовательно, передаточное число будет равно отношению длины окружности ведомого звена к разности длин окружностей колес (отношение длин окружностей в дальнейшем заменим отношением диаметров). У волновой передачи по схеме а рис. 52 направления вращения ведущего и ведомого звеньев совпадают, по схеме б — противоположны.
У зубчатых волновых передач гибкие колеса имеют наружные, а жесткие колеса — внутренние зубья. В настоящее время такие передачи имеют основное распространение.
Достоинства волновых зубчатых передач заключаются в возможности получения значительных передаточных чисел, небольшой массе и габаритах конструкции, высокой кинематической точности передачи, являющейся результатом многопарного зацепления зубьев. Волновые зубчатые передачи долговечны и имеют более низкий уровень шума по сравнению с обычными зубчатыми передачами.
К недостаткам волновых зубчатых передач следует отнести сложную технологию изготовления деталей и отсутствие конструкций, у которых оси пересекаются или скрещиваются.
Волновые передачи в наше время начинают применять в станкостроении, подъемно-транспортных машинах, химическом машиностроении, авиационной и ракетной технике, промышленных роботах и др.
В волновой фрикционной передаче передаточное отношение зависит от разности диаметров жесткого и гибкого колес и равно отношению диаметра ведомого колеса к разности диаметров колес. Заменяя отношение диаметров колес отношением чисел их зубьев, получим передаточное отношение и для волновой зубчатой передачи:
при ведомом жестком колесе u = ωh / ωb = zb / (zb-zg);
при ведомом гибком колесе
где zb, zg — числа зубьев жесткого и гибкого колес.
Для увеличения передаточного отношения разность чисел зубьев колес должна быть возможно меньшей, причем она должна быть равной или кратной числу волн деформации генератором гибкого колеса во избежание интерференции (наложения) зубьев.
Качество зацепления волновых зубчатых передач в основном зависит от профиля зубьев, формы генератора и размера деформации гибкого колеса.
Исследования прочности гибкого колеса показали, что напряжения в его ободе существенно уменьшаются с увеличением ширины впадины по окружности впадин.
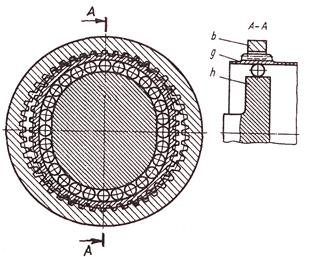 Рис. 53. Кулачковый генератор волн.
Рис. 53. Кулачковый генератор волн.
Наиболее распространенными являются зубья эвольвентного профиля с уменьшенной высотой и широкой впадиной у гибкого колеса, причем зубья жесткого колеса нарезаются стандартным инструментом, а зубья гибкого колеса — модифицированным инструментом, отличающимся от стандартного только высотой головки зуба. Такой профиль принят в нашей стране для стандартных волновых редукторов общего назначения.
Наиболее стабильную деформацию гибкого колеса обеспечивает кулачковый генератор волн h (рис. 53). Эти конструкции генераторов просты, технологичны и обеспечивают требования взаимозаменяемости.
Для уменьшения трения между кулачковым генератором и гибким колесом g располагают тела качения, например гибкий шариковый подшипник (рис. 54).
Гибким называется подшипник с тонкостенными кольцами, допускающий радиальную деформацию колец, соизмеримую с их толщиной, и обеспечивающий передачу вращательного движения при деформированных кольцах.
Основные размеры и обозначения радиальных шариковых гибких подшипников для кулачковых генераторов зубчатых волновых передач общего назначения регламентированы ГОСТом.
Волновые зубчатые редукторы. ГОСТ устанавливают основные параметры волновых зубчатых одноступенчатых редукторов общего назначения типа Вз с вращающими моментами на тихоходном валу от 22,4 до 6300 Н∙м и передаточными отношениями от 80 до 315. КПД стандартных волновых редукторов от 0,9 до 0,72 и уменьшается с увеличением передаточного отношения.
Технический ресурс волновых зубчатых редукторов 10 000ч.
На рис. 9.5 представлена конструкция стандартного волнового зубчатого редуктора Вз-160, внутренний диаметр гибкого колеса которого равен 160 мм. Диапазон номинальных передаточных отношений для таких редукторов от 80 до 250, допускаемый вращающий момент на тихоходном валу от 710 до 1000 Н∙м, масса редуктора не более 56 кг, КПД не менее 0,81.
 Рис. 54.Волновой зубчатый редуктор Вз-160.
Рис. 54.Волновой зубчатый редуктор Вз-160.
Основными критериями работоспособности волновых передач являются прочность гибкого колеса и прочность гибкого подшипника генератора. Разрушение гибкого колеса и гибкого подшипника происходит, как правило, в результате усталости материала или при перегрузках.
Волновые передачи можно применять как редуктор, дифференциальный механизм и как вариатор скорости.
3.5. Ременные передачи. Общие сведения и основные характеристики. Области применения. Разновидности ременных передач. Достоинства и недостатки. Плоскоременная передача: основные типы и материалы ремней. Клиноременная передача: основные характеристики и области применения. Поликлиновая ременная передача: основные характеристики, материалы ремней.
РЕМЕННЫЕ ПЕРЕДАЧИ
Ременная передача — это передача механической энергии при помощи гибкого элемента (ремня) за счёт сил трения или сил зацепления (зубчатые ремни). Может иметь как постоянное, так и переменное передаточное число (вариатор); валы, которые могут быть с параллельными, пересекающимися и скрещивающимися осями.
Ременная передача (рис. 59) состоит из ведущего 1 и ведомого 2 шкивов и надетого на них ремня 3. В состав передачи могут также входить натяжные устройства и ограждения. В передачах этого типа двигатель вращает шкив, увлекающий за счет возникающих сил трения за собой ремень, который в свою очередь заставляет вращаться ведомый шкив, соединенный с валом исполнительного механизма. Возможно применение нескольких ремней и нескольких ведомых шкивов.
 Рис. 59. Схема ременной передачи.
Рис. 59. Схема ременной передачи.
По конструкции они делятся на плоско- и клиноременные. По принципу работы различаются передачи, трением (большинство передач) и зацеплением (зубчато-ременные). Передачи зубчатыми ремнями по своим свойствам существенно отличаются от передач трением.
Ремни передач трением по форме поперечного сечения подразделяют на (рис. 60):
а) плоские ремни;
б) клиновые ремни;
в) поликлиновые ремни;
г) ремни круглого сечения;
д) ремни квадратного сечения.
 Рис. 60. Сечения ремней.
Рис. 60. Сечения ремней.
Плоские (а), клиновые (б) и поликлиновые (в) ремни рассмотрим ниже.
Круглые ремни (см. рис. 60, г) выполняют из резины диаметром от 3 до 12 мм, используются для передачи небольших мощностей в приборах и бытовой технике.
Ремни квадратного сечения (см. рис. 60, д) применяют для передачи небольших мощностей в приборах.
Достоинства ременных передач (в сравнении с цепной передачей):
o плавность работы;
o бесшумность;
o компенсация перегрузок;
o отсутствие в необходимости смазки;
o малая стоимость;
o легкий монтаж;
o возможность работы на высоких окружных скоростях;
o при выходе из строя, нет повреждений.
Недостатки (в сравнении с цепной передачей):
- большие габариты;
- малая несущая способность;
- проскальзывание (не относится к зубчатым ремням);
- малая долговечность.
Ремни должны обладать высокой прочностью при переменных напряжениях, износостойкостью, максимальным коэффициентом трения на рабочих-поверхностях, минимальной изгибной жесткостью.
Конструкцию ремней отличает наличие высокопрочного несущего слоя, расположенного вблизи нейтральной линии сечения. Повышенный коэффициент трения обеспечивается пропиткой ремня или применением обкладок.
Клиновые, поликлиновые, зубчатые и быстроходные плоские изготовляют бесконечными замкнутыми. Плоские ремни преимущественно выпускают конечными в виде длинных лент. Концы таких ремней склеивают, сшивают или соединяют металлическими скобами. Места соединения ремней вызывают динамические нагрузки, что ограничивает скорость ремня. Разрушение этих ремней происходит, как правило, по месту соединения.
При проектировании ременных передач определяют (рис. 61): угол γ между ветвями ремня, угол α1охвата ремнем малого шкива, длину ремня L и при использовании бесконечных ремней - межосевое расстояние а. Расчетные диаметры шкивов и длины ремней определяют по нейтральному слою поперечного сечения ремня.
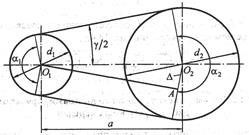 Рис. 61. Геометрические параметры ременной передачи.
Рис. 61. Геометрические параметры ременной передачи.
Окружные скорости, м/с, на шкивах (см. рис. 59):
v 1 =  и v 2 =
и v 2 =  ,
,
где d 1 и d 2 —диаметры ведущего и ведомого шкивов, мм; n 1 и п2 — частоты вращения шкивов, мин-1.
Окружная скорость на ведомом шкиве v 2 меньше скорости на ведущем v 1 вследствие скольжения:
v2 = (1 – ζу) v 1.
Передаточное отношение
u = n 1 / n 2 = d 2 / (d 1 (1 – ζу)).
Обычно упругое скольжение находится в пределах 0,01...0,02 и растет с увеличением нагрузки.
Плоскоременная передача
Наиболее типичные схемы передач плоским ремнем (см. рис. 60, а) представлены на рис. 62: а — открытая (оси валов параллельны, шкивы вращаются в одинаковом направлении); б — перекрестна я (оси валов параллельны, шкивы вращаются в противоположных направлениях); в — полуперекрестная (оси валов перекрещиваются); г — угловая (с направляющими роликами, оси валов перекрещиваются или пересекаются); д — со ступенчатыми шкивами (регулируемая передача); е — с холостым шкивом (применяется для пуска и остановки ведомого вала при непрерывном вращении ведущего); ж — с натяжным роликом (применяется при малых межосевых расстояниях и больших передаточных числах и £10; натяжной ролик увеличивает угол обхвата шкивов и автоматически обеспечивает постоянное натяжение ремня).
Наибольшее распространение имеют открытые плоскоременные передачи. По сравнению с другими они обладают более высокой нагрузочной способностью, КПД и долговечностью ремней; в передачах б, в, г, ж ремень изнашивается быстрее вследствие дополнительных перегибов, закручивания или взаимного трения ведущей и ведомой ветвей. Плоскоременные передачи обеспечивают высокую плавность работы (плавность характеризует величину погрешностей угла поворота, многократно повторяющихся за один оборот).
 КПД передач плоским ремнем η = 0,93...0,98. Передаточное число открытой передачи и £5; с натяжным роликом и £10.
КПД передач плоским ремнем η = 0,93...0,98. Передаточное число открытой передачи и £5; с натяжным роликом и £10.
Рис. 62. Схемы плоскоременных передач.
Плоскоременные передачи предпочтительны при больших межосевых расстояниях; кроме того, они сравнительно дешевы, ремни их обладают большой гибкостью и повышенной долговечностью, шкивы просты по конструкции. Плоскоременные передачи применяют при весьма высоких скоростях ремня (до 100 м/с).
Общие требования, которые предъявляются к материалам приводных ремней, заключаются в следующем: достаточно высокое сопротивление усталости, статическая прочность и износостойкость, высокий коэффициент трения, эластичность (малая жесткость при растяжении и изгибе), а также невысокая стоимость и недефицитность.
Плоские ремни бывают кожаные, шерстяные, хлопчатобумажные, резинотканевые и синтетические.
Кожаные ремни среди плоских ремней обладают наибольшей тяговой способностью и эластичностью. Кожаные ремни хорошо работают при переменных и ударных нагрузках на шкивах малых диаметров; допускаемая скорость ремня 45 м/с. Ремни изготовляют одинарными и двойными (по согласованию с потребителем допускается изготовлять тройные ремни) шириной от 10 до 560 мм. Кожаные ремни не рекомендуется применять в промышленных установках при едком паре и газах. Из-за дефицитности и высокой стоимости применение кожаных ремней весьма ограничено.
Шерстяные ремни состоят из слоев шерстяной тканой основы, прошитых хлопчатобумажными нитями и пропитанных специальным составом, состоящим из железного сурика на олифе. Эти ремни дороги, но хорошо противостоят сырости и воздействию химически активных сред, поэтому применяются главным образом в химической промышленности. Шерстяные ремни хорошо работают при неравномерных и ударных нагрузках и допускают скорость ремня до 30 м/с.
Хлопчатобумажные цельнотканые пропитанные ремни состоят из нескольких слоев хлопчатобумажной пряжи, пропитанных специальным составом. Такие ремни применяются при небольших мощностях и скоростях ремня до 25 м/с; удовлетворительно работают на шкивах малых диаметров, непригодны при работе на открытом воздухе, в сырых помещениях, при опасности воздействия кислот и температуры выше 45° С.
Резинотканевые плоские приводные ремни имеют наибольшее распространение. Они состоят из тканевого каркаса нарезной конструкции с резиновыми прослойками между прокладками. Каркас ремней изготовляют из технических тканей с хлопчатобумажными, комбинированными или синтетическими нитями (по согласованию с потребителем ремни на основе первых двух тканей допускается изготовлять без резиновых прослоек). Наиболее прочны ремни с каркасом из синтетических тканей. Основная нагрузка воспринимается тканью, а резина обеспечивает работу ремня как единого целого, защищает ткань от повреждений и повышает коэффициент трения ремня о шкив.
Резинотканевые ремни обладают хорошей тяговой способностью, прочностью, эластичностью, малочувствительны к влаге и колебаниям температуры, однако их нельзя применять в средах, содержащих нефтепродукты. Для работы в сырых помещениях или при возможном воздействии кислот или щелочей применяют ремни с наружными резиновыми обкладками (одной или двумя).
Ремни изготовляют двух видов: общего назначения для интервала температур воздуха от минус 25 до плюс 60 °С и морозостойкие для интервала температур от минус 45 до плюс 60 °С.
Ремни изготовляют конечными или бесконечными шириной от 20 до 1200 мм с числом прокладок от 3 до 6.
Резинотканевые ремни допускают скорость до 30 м/с. Для некоторых видов резинотканевых ремней в зависимости от их функционального назначения стандарт устанавливает средний ресурс или средний срок службы в часах или других единицах.
Синтетические плоские ремни. Весьма перспективны плоские ремни из синтетических материалов, обладающие высокой статической прочностью, эластичностью и долговечностью. Армированные пленочные многослойные ремни на основе синтетических полиамидных материалов могут передавать мощности в тысячи киловатт при скорости ремня до 60 м/с. Пленочные ремни малой толщины (от 0,4 до 1,2 мм) могут передавать значительные мощности (до 15 кВт), работать при скоростях до 100 м/с и на шкивах малых диаметров. Тяговую способность синтетических ремней повышают за счет специальных фрикционных покрытий.
Расчет плоскоременных передач. При проектном расчете плоскоременных передач, прежде всего выбирают тип ремня, а затем определяют минимальный диаметр малого шкива по формуле М. А. Саверина:
D min = (0,052...0,061)  ,
,
где P 1— передаваемая мощность; ω 1— угловая скорость малого шкива (для синтетических ремней формула Саверина дает несколько завышенные результаты).
Полученный диаметр округляют до ближайшего стандартного значения D 1 из ряда, (мм): 40; 45; 50; 56; 63; 71; 80; 90; 100; 112; 125; 140; 160; 180; 200 и т.д. до 2000. Затем находят окружную скорость ремня по формуле v = ω 1 D 1 / 2и сопоставляют ее с оптимальной для выбранного типа ремня. Далее определяют все геометрические параметры передачи и приступают к расчету ремня.
Зная диаметр D 1 малого шкива и отношение D 1 / δ, определяем толщину ремня δ, округляя ее до ближайшего меньшего стандартного значения. Дальнейший расчет кожаных и текстильных ремней сводится к определению ширины b ремня по формуле
b = F 1/([ k ] δ),
где F, — окружная сила; [ k ] — допускаемое полезное напряжение:
[ k ] = k 0 C 0 C α C v / C p.
В этой формуле k 0 — приведенное полезное напряжение; C 0 — коэффициент, учитывающий тип передачи и ее расположение (для открытых горизонтальных передач и любых передач с автоматическим натяжением ремня C 0 = 1; при угле наклона межосевой линии к горизонту более 60° C 0 = 0,9...0,8, так как при больших углах наклона передачи вес ремня ухудшает его сцепление с нижним шкивом); C α— коэффициент угла обхвата малого шкива:
α 10............... 180 170 160 150
C α................ 1,0 0,97 0,94 0,91
C v — коэффициент влияния центробежных сил, зависящий от скорости v ремня:
v, м/с............ 1 10 20 30
C v................ 1,04 1,0 0,88 0,68
C p — коэффициент динамичности и режима работы (при односменной работе и характере нагрузки: спокойная C p = 1, умеренные колебания C p= 1,2, ударная C p = 1,3; при двухсменной работе значения повышаются на 15%, при трехсменной — на 40%).
У резинотканевых ремней основную нагрузку несут тканевые прокладки, поэтому в качестве характеристики тяговой способности этих ремней принимается приведенная рабочая нагрузка q, приходящаяся на миллиметр ширины одной прокладки.
По стандарту для тканей из хлопчатобумажных и комбинированных нитей q = 3 Н/мм, для тканей из синтетических нитей q = 10...20 Н/мм в зависимости от сорта ткани.
Ширина b резинотканевых ремней определяется по формуле
b = Ft / (i [ q ]),
где Ft, — окружная сила; i — количество прокладок в ремне; [ q ]— допускаемая рабочая нагрузка на миллиметр ширины прокладки:
[ q ]= q 0 C 0 C α C v / C p,
(коэффициенты С выбирают такими же, как для кожаных и текстильных ремней).
Количество прокладок i в ремне определяется по табл. 10 в зависимости от диаметра малого шкива и скорости ремня.
Таблица 10.
Определение количества прокладок в зависимости от диаметра малого шкива и скорости ремня.
| Количество прокладок | Диаметр шкива, мм, для скорости ремня до, м/с | |||||
Клиноременная передача
Клиновые ремни (рис. 60, б) имеют трапециевидное сечение с боковыми рабочими сторонами, соприкасающимися с канавками на шкивах. Благодаря клиновому действию ремни этого типа обладают повышенным сцеплением со шкивами.
По сравнению с плоскоременными клиноременные передачи обладают большей тяговой способностью, имеют меньшее межосевое расстояние, допускают меньший угол обхвата малого шкива и большие передаточные числа (и £ 10). Однако стандартные клиновые ремни не допускают скорость более 30 м/с из-за возможности крутильных колебаний ведомой системы, связанных с неизбежным различием ширины ремня по его длине и, как следствие, непостоянством передаточного отношения за один пробег ремня. У клиновых ремней большие потери на трение и напряжения изгиба, а конструкция шкивов сложнее.
Клиноременные передачи широко используют в индивидуальных приводах мощностью до 400 кВт. КПД клиноременных передач η = 0,87... 0,97.
Клиновые приводные ремни выполняют бесконечными резинотканевой конструкции трапецеидального сечения с углом клина φ0 = 40°. В зависимости от отношения ширины b 0большего основания трапеции к ее высоте h клиновые ремни бывают нормальных сечений (b 0/ h ≈ 1,6 см. рис. 63); узкие (b 0/ h ≈ 1,2); широкие (b 0/ h ≈ 2,5 и более; применяют для клиноременных вариаторов).
 В настоящее время стандартизованы клиновые ремни нормальных сечений, предназначенные для приводов станков, промышленных установок и стационарных сельскохозяйственных машин. Основные размеры и методы контроля таких ремней регламентированы ГОСТ 1284.1—89; обозначения сечений показаны на рис. 63.
В настоящее время стандартизованы клиновые ремни нормальных сечений, предназначенные для приводов станков, промышленных установок и стационарных сельскохозяйственных машин. Основные размеры и методы контроля таких ремней регламентированы ГОСТ 1284.1—89; обозначения сечений показаны на рис. 63.
Рис.63. Сечения клиновых ремней по ГОСТ 1284.1-89.
Ремни сечения ЕО применяют только для действующих машин и установок. Стандартные ремни изготовляют двух видов: для умеренного и тропического климата, работающих при температуре воздуха от минус 30 до плюс 60 °С, и для холодного и очень холодного климата, работающих при температуре от минус 60 до плюс 40 °С. Ремни сечений А, В и С для увеличения гибкости могут изготовляться с зубьями (пазами) на внутренней поверхности, полученными нарезкой или формованием (рис. 64, в).Клиновые ремни (рис. 64, а, б) состоят из резинового или резинотканевого слоя растяжения 1, несущего слоя 2 на основе материалов из химических волокон (кордткань или кордшнур), резинового слоя сжатия 3 и оберточного слоя прорезиненной ткани 4. Сечение ремня кордтканевой (а), кордшнуровой (б)конструкции показаны на рис. 64.
 Более гибки и долговечны кордшнуровые ремни, применяемые в быстроходных передачах. Допускаемая скорость для ремней нормальных сечений v £ 30 м/с.
Более гибки и долговечны кордшнуровые ремни, применяемые в быстроходных передачах. Допускаемая скорость для ремней нормальных сечений v £ 30 м/с.
Технические условия на ремни приводные клиновые нормальных сечений регламентированы ГОСТ 1284.2-89, а передаваемые мощности — ГОСТ 1284.3-89.
Рис. 64. Сечение клинового ремня: а) кордтканевая; б) кордшнуровая.
Кроме вышеуказанных приводных клиновых ремней стандартизованы: ремни вентиляторные клиновые (для двигателей автомобилей, тракторов и комбайнов) и ремни приводные клиновые (для сельскохозяйственных машин).
При необходимости работы ремня с изгибом в двух направлениях применяют шестигранные (сдвоенные клиновые) ремни.
Весьма перспективны узкие клиновые ремни, которые передают в 1,5—2 раза большие мощности, чем ремни нормальных сечений. Узкие ремни допускают меньшие диаметры малого шкива и работают при скоростях до 50 м/с; передачи получаются более компактными. Четыре сечения этих ремней УО (SPZ), УА (SPA), УБ (SPB), УВ (SPC) заменяют семь нормальных сечений.
Узкие ремни обладают повышенной тяговой способностью за счет лучшего распределения нагрузки по ширине несущего слоя, состоящего из высокопрочного синтетического корда. Применение узких ремней значительно снижает материалоемкость ременных передач. Узкие ремни пока не стандартизованы и изготовляются в соответствии с ТУ 38 605 205-95.
Следует отметить, что в клиноременных передачах с несколькими ремнями из-за разной длины и неодинаковых упругих свойств нагрузка между ремнями распределяется неравномерно. Поэтому в передаче не рекомендуется использовать более 8...12 ремней.
По сравнению с плоскоременными клиноременные передачи обладают значительно большей тяговой способностью за счет повышенного сцепления, обусловленного приведенным коэффициентом трения f / между ремнем и шкивом.
Как известно из рассматриваемой в теоретической механике теории трения клинчатого ползуна,
f / = f / (sin (α/2)),
где f — коэффициент трения на плоскости (для прорезиненной ткани по чугуну f = 0,3); α — угол профиля канавки шкива.
Приняв α = φ 0 = 40°, получим
f / = f / (sin 20°) ≈ 3 f.
Таким образом, при прочих равных условиях клиновые ремни способны передавать в три раза большую окружную силу, чем плоские.
Многопрофильные ремни. Состоят из двух-четырех клиновых, соединенных между собой тканевым слоем, и применяются вместо комплектов клиновых ремней.
Расчет передачи с клиновыми ремнями проводят из условий обеспечения тяговой способности и долговечности ремней; он основан на тех же предпосылках, что и расчет плоскоременных передач.
Расчет ремней выполняют с помощью таблиц, содержащих номинальные мощности, передаваемые одним ремнем в зависимости от сечения ремня, расчетного диаметра малого шкива, его частоты вращения и передаточного числа (расчетный диаметр шкива клиноременной передачи соответствует положению нейтрального слоя ремня, установленного в канавке шкива).
Проектный расчет клиноременной передачи начинают с выбора сечения ремня по заданной передаваемой мощности и частоте вращения малого шкива с помощью графиков их зависимостей. При мощностях до 2 кВт применяют сечение Z, а сечение ЕО — при мощностях свыше 200 кВт.
Далее определяется расчетный диаметр малого шкива. Минимально допустимые значения расчетных диаметров d min малого шкива следующие:
Сечение ремня..... Z А В С D E УО УА УБ УВ
d min, мм…….......... 63 90 125 200 355 500 63 90 140 224
Следует помнить, что вышеприведенные значения расчетных диаметров малого шкива обеспечивают минимальные габариты передачи, но с увеличением этого диаметра возрастают тяговая способность и КПД передачи, а также долговечность ремней. При отсутствии жестких требований к габаритам передачи расчетный диаметр d 1малого шкива следует принимать больше минимально допустимого значения. Диаметр d 2большого шкива определяют по формуле d 2 = u d 1,
где u — передаточное число передачи; полученное значение округляют до ближайшего стандартного размера.
Расчетные диаметры шкивов клиноременных передач выбирают из стандартного ряда (мм): 63; 71; 80; 90; 100; 112; 125; 140; 160; 180; 200; 1224; 250; 280; 315; 355; 400; 450; 500 и т. д.
Далее определяют окружную скорость v ремня по формуле
v = π d 1 n 1 /60,
где d 1, n 1 — расчетный диаметр и частота вращения малого шкива.
Межосевое расстояние а предварительно определяют по условию
0,55(d 1 + d2) +h < a < 2(dl + d2),
где h — высота сечения ремня. Следует помнить, что с увеличением межосевого расстояния долговечность ремней увеличивается.
Расчетная длина ремня Lp вычисляется по формуле Lp = 2 а + π (D 1 + D 2)/ 2 + (D 2 – D 1)2 / (4 a),
где D 1, D 2 – диаметры ведущего и ведомого шкивов; a – межосевое расстояние.
И округляется до ближайшей стандартной длины из ряда (для сечения В) (мм): 800; 900; 1000; 1120; 1250; 1400; 1600; 1800; 2000; 2120; 2240 и т. д. до 6300.
Затем определяют окончательное межосевое расстояние а в зависимости от принятой стандартной расчетной длины ремня а = 0,25 [(L — w)+  ].
].
где w = π (D 1 + D 2)/ 2; у = (D 2 – D 1)2 / 4.
Мощность Р р, передаваемая одним ремнем, рассчитывается по формуле P p =P 0 C α C L/ C p,
где P 0— номинальная мощность, передаваемая одним ремнем (находится по ГОСТ); C α— коэффициент угла обхвата:
α1°............... 180 160 140 120 90
C α................ 1,0 0,95 0,89 0,82 0,68
C L— коэффициент длины ремня, зависящий от отношения принятой длины L ремня к исходной длине Lp, указанной в стандарте:
L / Lp........ 0,3 0,5 0,8 1,0 1,6 2,4
CL.............. 0,79 0,86 0,95 1,0 1,1 1,2
C p — коэффициент динамичности и режима работы; ориентировочно принимается как для плоскоременных передач, (подробная таблица значений C p приведена в стандарте).
Дальнейший расчет клиноременной передачи сводится к определению числа ремней z по формуле
z = P /(СZ:Pf),
где Р

