




Для моделирования регулятора с широтно-импульсной модуляцией разработаем модель широтно-импульсного модулятора (ШИМ). В основу простейшей модели ШИМ положен следующий принцип. Пусть имеется генератор пилообразного сигнала (рис. 4.9) с высотой пилы А и шагом t0.

Рис. 4.9. Принцип построения ШИМ
Если сигнал этого генератора вычесть из постоянного сигнала с уровнем u, то получим пилообразный сигнал, у которого длительность положительного значения каждого импульса t1 будет пропорциональна уровню постоянного сигнала u. Если из этого сигнала сформировать импульсную последовательность, то получим последовательность прямоугольных импульсов со скважностью, пропорциональной уровню сигнала (рис. 4.10).
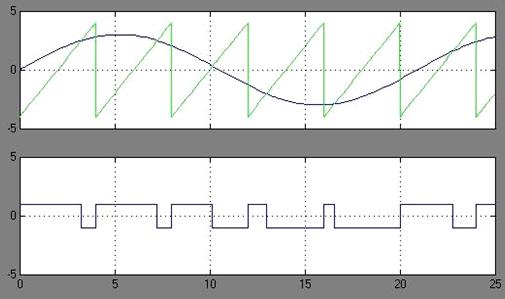
Рис. 4.10. Графики построения ШИМ сигнала
Схема моделирования широтно-импульсного модулятора для разрабатываемой АСР приведена на рис. 4.11.

Рис. 4.11. Схема моделирования широтно-импульсного модулятора
Входной сигнал подвергается дискретизации экстраполятором нулевого порядка с шагом Т д = 7. Генератор пилообразного сигнала с периодом, равным шагу квантования входного сигнала, представлен блоком Repeating Sequence библиотеки Simulink. Для моделирования прямого и реверсивного хода двигателя нужно на его вход подавать положительный и отрицательный сигнал. С этой целью используем блок Sign, на выходе которого в зависимости от значения входного сигнала появляется либо 1, либо -1. На выходе блока max, когда значение сигнала больше нуля, формируются импульсы с амплитудой +1. Блок min формирует отрицательные импульсы, если значение входного сигнала меньше нуля, в противном случае значение импульса равно нулю. Далее выходные значения блоков min и max суммируются.
Общая схема моделирования АСР температуры с широтно-импульсной модуляцией представлена на рис. 4.12. Для удобства модель ШИМ (см. рис. 4.11) объединена в подсистему Subsystem.

Рис. 4.12. Схема моделирования АСР температуры с ШИМ
|
|

Рис. 4.13. Графики переходных процессов
Для оценки возможности применения регулятора с широтно-импульсной модуляцией применим интегральный критерий. В результате оценки интегральная ошибка составила 0°С.
Выполним моделирование АСР температуры с учетом возмущающего воздействия zв(t) = 0,4, приложенного ко входу ОР. Анализ полученной при этом переходной характеристики показывает, что регулятор полностью отрабатывает влияние возмущения на систему. Время регулирования удовлетворяет заданному.
МЕТОДИЧЕСКИЕ УКАЗАНИЯ
Задание и таблица вариантов
Для заданной экспериментальной кривой разгона электрической печи (табл.4.2) выполнить синтез АСР температуры с ШИМ-регулятором, реализовать модель в Matlab/Simulink, получить и проанализировать график переходной характеристики АСР без учета и с учетом возмущающего воздейстия.
Таблица вариантов 4.2
| t, c | ||||||||||||||||
| T, °C | ||||||||||||||||
| t, c | ||||||||||||||||
| T, °C | 90,1 | 90,2 | 90,3 | 90,3 | 90,4 | 90,4 | ||||||||||
| t, c | ||||||||||||||||
| T, °C | 89,6 | 90,1 | 90,2 | 90,3 | 90,3 | 90,3 | 90,4 | |||||||||
| t, c | ||||||||||||||||
| T, °C | 100,7 | 101,1 | 101,2 | 101,2 | 101,3 | |||||||||||
| t, c | ||||||||||||||||
| T, °C | 100,2 | 100,7 | 100,9 | 101,1 | 101,2 | 101,2 | 101,3 | |||||||||
| t, c | ||||||||||||||||
| T, °C | 111,4 | 111,8 | 111,9 | 112,1 | 112,2 | |||||||||||
| t, c | ||||||||||||||||
| T, °C | 109,2 | 110,6 | 111,3 | 111,7 | 111,9 | 112,0 | 112,1 | 112,2 | ||||||||
| t, c | ||||||||||||||||
| T, °C | 122,2 | 122,6 | 122,8 | 122,9 | 123,0 | 123,0 | ||||||||||
| t, c | ||||||||||||||||
| T, °C | 120,9 | 121,8 | 122,4 | 122,7 | 122,8 | 122,9 | 123,0 | |||||||||
| t, c | ||||||||||||||||
| T, °C | 121,8 | 127,0 | 129,9 | 131,7 | 132,7 | 133,3 | 133,5 | 133,7 | 133,8 | 133,9 | ||||||
| t, c | ||||||||||||||||
| T, °C | 128,9 | 131,2 | 132,3 | 133,0 | 133,4 | 133,7 | 133,8 | 133,9 | ||||||||
| t, c | ||||||||||||||||
| T, °C | 143,8 | 144,3 | 144,5 | 144,7 | 144,8 | |||||||||||
| t, c | ||||||||||||||||
| T, °C | 144,4 | 144,5 | 144,7 | |||||||||||||
| t, c | ||||||||||||||||
| T, °C | 155,3 | 155,5 | 155,6 | |||||||||||||
| t, c | ||||||||||||||||
| T, °C | 154,7 | 155,1 | 155,4 | 155,5 | ||||||||||||
| t, c | ||||||||||||||||
| T, °C | 165,9 | 166,2 | 166,4 | |||||||||||||
| t, c | ||||||||||||||||
| T, °C | 165,4 | 165,9 | 166,2 | 166,4 | ||||||||||||
| t, c | ||||||||||||||||
| T, °C | 175,3 | 176,1 | 176,7 | 177,1 | 177,3 | |||||||||||
| t, c | ||||||||||||||||
| T, °C | 174,5 | 175,7 | 176,4 | 176,8 | 177,1 | |||||||||||
| t, c | ||||||||||||||||
| T, °C | 186,3 | 187,2 | 187,7 |
Продолжение таблицы вариантов 4.2
| t, c | ||||||||||||||||
| T, °C | 180,3 | 183,3 | 185,1 | 186,3 | 187,1 | 187,6 | 187,9 | |||||||||
| t, c | ||||||||||||||||
| T, °C | 193,8 | 195,8 | 197,1 | 197,9 | 198,5 | 198,8 | ||||||||||
| t, c | ||||||||||||||||
| T, °C | 193,1 | 195,3 | 196,7 | 197,7 | 198,3 | 198,7 | ||||||||||
| t, c | ||||||||||||||||
| T, °C | 199,9 | 203,6 | 205,9 | 207,4 | 208,4 | 209,1 | 209,5 | |||||||||
| t, c | ||||||||||||||||
| T, °C | 198,9 | 202,7 | 205,2 | 206,9 | 208,1 | 208,8 | 209,3 |
Порядок выполнения работы
2.2.1. Выполнить параметрическую идентификацию объекта регулирования по переходной характеристике (кривой разгона), используя метод Ормана. Звено транспортного запаздывания представить последовательным соединением цепочки апериодических звеньев. Получить модель ЭП.
2.2.2. Выполнить синтез АСР температуры с непрерывным регулятором. Для расчета регулятора использовать инструмент sisotool пакета MATLAB и желаемые частотные характеристики ОР.
2.2.3. Составить схему моделирования АСР температуры с непрерывным регулятором, построить график переходной характеристики, проанализировать устойчивость и качество системы.
2.2.4. Выполнить синтез АСР температуры с ШИМ-регулятором. Использовать модель широтно-импульсного модулятора (см. рис. 4.11), на которой получить графики ШИМ сигнала.
2.2.5. Составить схему моделирования АСР температуры с ШИМ-регулятором, построить график переходной характеристики, проанализировать устойчивость и качество системы.
2.2.6. Выполнить совмещенное моделирование АСР с непрерывным и ШИМ-регулятором, получить графики изменения ошибки регулирования, определить интегральную ошибку.
2.2.7. Выполнить моделирование АСР с ШИМ-регулятором с учетом возмущающего воздейстия, получить график переходной характеристики.
2.2.8. С целью проверки настроечных параметров регулятора установить их для реального регулирующего устройства ИРТ5501/М1 на лабораторной установке. Оценить характер переходного процесса по графику в режиме реального времени на мониторе.
Контрольные вопросы
1. Что собой представляет объект регулирования в данной лабораторной работе, а также структура АСР температуры и устройство ШИМ-регулятора?
2. Каким образом выполняется параметрическая идентификация объекта регулирования по экспериментальной кривой разгона?
3. Каков порядок синтеза АСР температуры в рабочем пространстве электрической печи?
4. Какие требования предъявляются к АСР с точки зрения качества регулирования?
5. Какой метод использован для расчета параметров непрерывного регулятора в АСР температуры? Исходя из каких соображений строится желаемая ЛАЧХ?
6. Какой принцип положен в основу простейшей модели ШИМ-регулятора?
7. На основе каких элементарных преобразователей реализована схема моделирования широтно-импульсного модулятора?
8. Чему равна интегральная ошибка регулирования по результатам совмещенного моделирования АСР температуры с непрерывным и ШИМ-регулятором?
9. Чему равна ошибка регулирования по результатам моделирования АСР температуры с ШИМ-регулятором с учетом возмущающего воздействия?
10. Обеспечивают ли выбранные настроечные параметры регулятора требуемое качество регулирования после их установки для реального регулирующего устройства ИРТ5501/М1 на лабораторной установке?
Литература
1. Э.Джури. Импульсные системы автоматического регулирования. Пер. с англ. М.А.Берманта и Ж.Л.Грина / Под ред. Я.З.Цыпкина. – М.: Физматгиз, 1963. – 456 с.
2. Теория автоматического управления: Учеб. для вузов. Ч. II. Теория нелинейных и специальных систем автоматического управления / Под ред. А. А. Воронова. – 2-е изд., перераб. и доп. – М.: Высшая школа, – 1986. – 504 с.
3. Теория автоматического управления: Учебник для вузов / А.А. Ерофеев. – СПб.: Политехника, 2003. – 302 с.
4. Теория автоматического управления / В.А. Бесекерский, Е.П. Попов. – СПб.: Профессия, 2004. – 752 с.
5. Кузнецов В.П. Линейные импульсные системы: Математическое описание. Тексты лекций по курсу “Теория автоматического управления” для студентов специальности “Автоматика и управление в технических системах” / В.П. Кузнецов. – Минск: БГУИР, 1996. – 70 с.
6. ТАУ дискретных систем. Конспект лекций / Бородавкин В.А., Петрова И.Л. – СПб: БГТУ Военмех, 2005. – 77 с.
7. Расчет и проектирование дискретных систем управления / Под ред. Л.Т. Кузина. – М.: Машгиз, 1962. – 684 с.
8. Теория автоматического управления. Теория линейных непрерывных АСУ: Учебное пособие / Щербина Г.С., Егоров А.П., Потап О.Е. и др. – Днепропетровск: НМетАУ, 2007. – 108 с.
Учебное издание

