




При автоматизації технологічних процесів часто доводиться зустрічатися з інерційними статичними об'єктами, перехідні характеристики яких мають специфічну S-Образну форму. Нахил, кривизна характеристики і її відстань від осі ординат залежать від динамічних властивостей конкретного об'єкта.
Для практичних розрахунків систем управління такими об'єктами кожну S-Образну криву перехідного процесу, зняту при одиничному східчастому впливі, досить охарактеризувати наступними параметрами, обумовленими безпосередньо за графіком:
- коефіцієнт передачі  ;
;
- постійна часу  ;
;
- повне запізнювання  ;
;
Параметри й визначаються досить легко – проведенням дотичної до найбільш крутої ділянки перехідної характеристики.
Використовуємо загальні принципи побудови ідеальної системи для вибору структури й параметрів регулятора, що гарантують одержання заданих показників якості в системі управління з одним з наступних інерційних об'єктів першого й другого порядку із запізнюванням:
 (12)
(12)
 (13)
(13)
 (14)
(14)
де  ,
,  ,
,  , а параметри й визначаються експериментально - проведенням дотичної до перехідної характеристики об'єкта.
, а параметри й визначаються експериментально - проведенням дотичної до перехідної характеристики об'єкта.
Підставивши передатну функцію об'єкта (12) у передатну функцію регулятора, ідеальну для об'єктів із запізнюванням (при відсутності перешкоди й збурювання)
 , (15)
, (15)
і зробивши наближену заміну, припустиму в області низьких частот, тобто при повільних впливах
 , (16)
, (16)
одержимо

 ;
;  ;
;  . (17)
. (17)
Очевидно, що для об'єкта з інерційною частиною першого порядку (12) регулятор Ресвіка (15) вироджується в ПІ-регулятор з відповідними настроєчними параметрами (17).
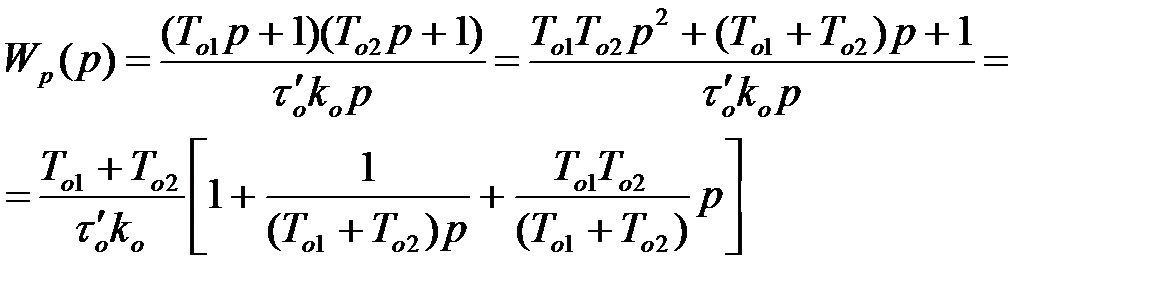
Для об'єкта (13), що має інерційну частину другого порядку, найкращим буде ПІД-регулятор. Дійсно, якщо підставити передатну функцію (13) у загальну формулу ідеального регулятора (15) і врахувати заміну (16), те одержимо
 ;
;  ;
;  ;
;  (18)
(18)
Для найбільш раціональної апроксимації об'єктів з s-образною перехідною характеристикою - моделі (14) із двома однаковими постійними часу  параметри ПІД-регулятора повинні бути рівні:
параметри ПІД-регулятора повинні бути рівні:
 ;
;  ;
;  .
.
На підставі отриманих загальних співвідношень між параметрами об'єкта й регулятора можна сформулювати рекомендації з вибору законів регулювання і їх настроєчних параметрів:
1. Для об'єктів із запізнюванням, інерційна частина яких дійсно близька ланці першого порядку (а не просто апроксимована такою ланкою!), доцільно застосовувати ПІД-регулятор.
2. Для об'єктів із запізнюванням, у яких інерційна частина має порядок  , найкращим регулятором є ПІД-регулятор.
, найкращим регулятором є ПІД-регулятор.
3. Значення настроєчних параметрів ПІ- і ПІД-регуляторів пов'язані з параметрами об'єкта: передатний коефіцієнт регулятора kp обернено пропорційний коефіцієнту об'єкта ko і прямо пропорційний відношенню  ; постійна часу інтегрування ТИ й постійна часу диференціювання ТД пропорційні постійної часу об'єкта
; постійна часу інтегрування ТИ й постійна часу диференціювання ТД пропорційні постійної часу об'єкта  . Коефіцієнти пропорційності між параметрами регулятора й об'єкта залежать від крапки додатка й характеру вхідних впливів і вимог, пропонованих до перехідного процесу в системі регулювання.
. Коефіцієнти пропорційності між параметрами регулятора й об'єкта залежать від крапки додатка й характеру вхідних впливів і вимог, пропонованих до перехідного процесу в системі регулювання.
Помітимо, що введення диференціальної складової в ПІ-закон регулювання, як правило, поліпшує перехідний процес - зменшує перший викид і тривалість. Але при більших відносинах  або при дії в контурі системи випадкових перешкод ПІД-регулятор варто застосовувати з певною обережністю, після додаткових досліджень системи.
або при дії в контурі системи випадкових перешкод ПІД-регулятор варто застосовувати з певною обережністю, після додаткових досліджень системи.

