




Координатный способ задания движения точки
В выбранной системе координат задаются координаты движущейся точки как функции от времени. В прямоугольной декартовой системе координат это будут уравнения:
x=x(t)
y=y(t) (1.4)
z=z(t)
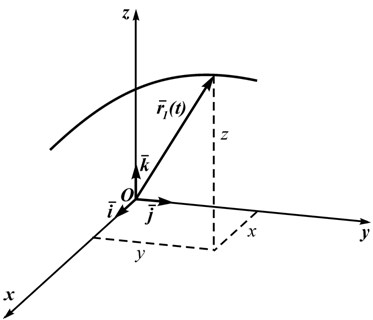
Рисунок 1.3
Эти уравнения являются и уравнениями траектории в параметрической форме. Исключая из этих уравнений параметр t, можно получить три пары систем двух уравнений, каждая из которых представляет траекторию точки, как пересечение поверхностей.
Кроме декартовых могут быть использованы другие системы координат (сферическая, цилиндрическая). Всегда можно перейти от координатного способа задания движения к векторному (рисунок 1.3):
r(t)=i⋅x(t) ⊕ j⋅y(t) ⊕ k⋅z(t) (1.5)
Поэтому, используя формулы для определения скорости и ускорения точки при векторном способе задания движения, можно получить аналогичные формулы для координатного способа:

То есть:

Направление вектора скорости определяется с помощью направляющих косинусов:
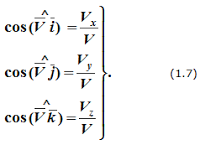
Формулы (1.6) и (1.7) полностью определяют вектор скорости при координатном способе задания движения точки, т.е. по величине и направлению.
Аналогичны формулы для определения ускорения точки:
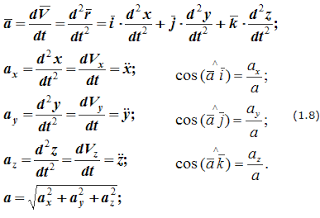
Формулы (1.8) определяют величину и направление вектора ускорения. В формулах (1.6) и (1.8) приведены используемые в различных учебниках обозначения проекций скоростей и ускорений точек на оси декартовой системы координат.
Уравне́ние движе́ния (уравнения движения) — уравнение или система уравнений, задающие закон эволюции механической или динамической системы (например, поля) во времени и пространстве[1].
Эволюция физической системы однозначно определяется уравнениями движения и начальными условиями.
Определение траектории, скорости и ускорения точки при координатном способе задания движения
Пусть движение точки задано уравнениями движения в декартовых координатах:  .
.
Для каждого момента времени t по этим уравнениям можно определить координаты точки в этот момент и указать ее положение в пространстве. Придавая t всевозможные значения, получим множество положений движущейся точки в пространстве — ее траекторию. Следовательно, уравнения движения одновременно являются уравнениями траектории точки в параметрической форме, причем параметром служит время t.
Чтобы получить уравнение траектории в виде зависимости между координатами точки, достаточно из уравнений движения исключить время.
2 Спроецируем силы  на ось x (рис. 6.15). Проекция
на ось x (рис. 6.15). Проекция
силы (как и любого другого вектора) на ось x есть алгебраическая величина, равная произведению модуля силы на косинус угла между силой и положительным направлением оси x. Если этот угол острый — проекция положительна, если тупой — отрицательна, если сила перпендикулярна оси, — ее проекция на ось равна нулю, если сила параллельна оси, — ее проекция равна модулю силы. Так, для сил, изображенных на рис. 6.15:


Рис. 6.15. Изменение проекции в зависимости от угла наклона силы к оси
Можно дать еще одно определение проекции силы на ось: про екцией силы на ось называется расстояние между двумя перпендикулярами, опущенными на эту ось из начала и конца вектора силы. Если направление силы совпадает с положительным направлением оси, — ее проекция положительна, если не совпадает — отрицательна. Проекция силы на ось в отличие от силы величина скалярная.
Модуль и направление силы можно определить по ее проекци ям на две взаимноперпендикулярные оси (рис. 6.16):

Из треугольника АВС, поскольку АС = FX и B С = FY, следует, что модуль силы F равен

Направление силы определяют косинусы углов:
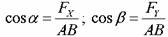

Рис. 6.16. Нахождение силы по её проекциям на оси координат
Проекцией силы  на плоскость Оху называется вектор
на плоскость Оху называется вектор  , заключенный между проекциями начала и конца силы
, заключенный между проекциями начала и конца силы
 на эту плоскость (рис. 6.17). Таким образом, в отличие от проекции силы на ось, проекция силы на плоскость есть величина не скалярная, а векторная, так как она характеризуется не только своими числовыми значениями, но и направлением в плоскости
на эту плоскость (рис. 6.17). Таким образом, в отличие от проекции силы на ось, проекция силы на плоскость есть величина не скалярная, а векторная, так как она характеризуется не только своими числовыми значениями, но и направлением в плоскости
Оху. По модулю  , где
, где  — угол между направлени
— угол между направлени
ем силы  и ее проекцией
и ее проекцией  .
.

Рис. 6.17. Проекция силы на плоскость
В некоторых случаях для нахождения проекции силы на ось удобнее найти сначала ее проекцию на плоскость, в которой эта ось лежит, а затем найденную проекцию на плоскость спроектировать на данную ось. Например, в случае, изображенном на рис. 6.17:

Проекции силы на координатные оси можно обозначать соответствующими заглавными буквами X, Y, Z, то есть FX = X, FY = Y, FZ = Z.
Экзаменационный билет № 16
- Теорема о сложении ускорений. Теорема Кориолиса.
- Геометрическое и аналитическое условия равновесия.
- Задача.

