




Если расчетные величины  превышают нормы, то необходимо подобрать автоматическое устройство, которое бы улучшало эти характеристики. Простейшим устройством такого типа является демпфер тангажа. Его уравнение упрощенно записывается в виде:
превышают нормы, то необходимо подобрать автоматическое устройство, которое бы улучшало эти характеристики. Простейшим устройством такого типа является демпфер тангажа. Его уравнение упрощенно записывается в виде:
 (руль высоты);
(руль высоты);
 (поворотный стабилизатор);
(поворотный стабилизатор);
 ;
;
 .
.
Можно показать, что добавление этих уравнений к системе уравнений коротко-периодического движения самолета приводит к новому выражению для коэффициента затухания  :
:
 , где:
, где:
 – по рисунку для руля высоты;
– по рисунку для руля высоты;
 – см. формулу выше;
– см. формулу выше;
 – для поворотного стабилизатора.
– для поворотного стабилизатора.
 (в диапазоне
(в диапазоне  ) и рассчитать ряд новых величин
) и рассчитать ряд новых величин  и соответственно новых значений параметров
и соответственно новых значений параметров  . В результате расчетов подбирается значение передаточного числа демпфера тангажа
. В результате расчетов подбирается значение передаточного числа демпфера тангажа  ,обеспечивающее наилучшее соответствие параметров переходного процесса нормируемым значениям.
,обеспечивающее наилучшее соответствие параметров переходного процесса нормируемым значениям.
Динамические характеристики управляемости
Если в правую часть уравнения коротко-периодического движения самолета внести в качестве возмущения константу – скачкообразное изменение положения руля высоты  или стабилизатора
или стабилизатора  (т.е. управляющее воздействие), то
(т.е. управляющее воздействие), то  .
.
Управляемость принято рассматривать, если произвести замену  на перегрузку
на перегрузку  :
:
 ,
,
 .
.
 , получим:
, получим:

 , здесь:
, здесь:
 – постоянная времени;
– постоянная времени;
 – относительный коэффициент демпфирования;
– относительный коэффициент демпфирования;
 – коэффициент усиления самолета по перегрузке;
– коэффициент усиления самолета по перегрузке;
 – градиент руля по перегрузке.
– градиент руля по перегрузке.
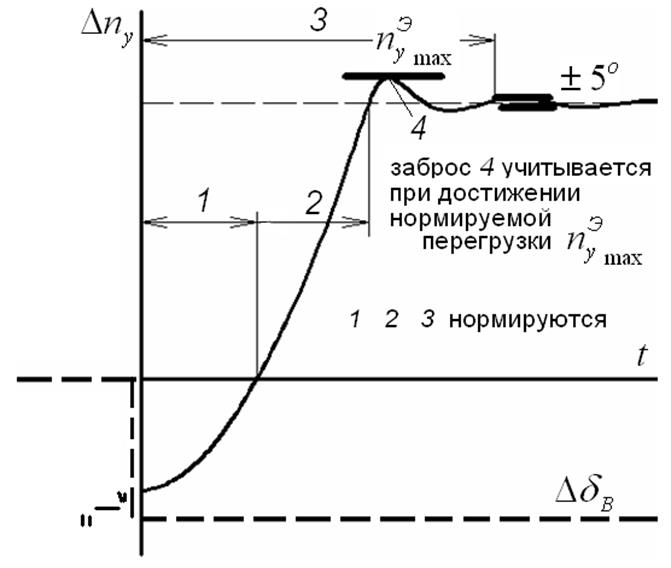
Анализ решения уравнения такого типа (относительно  ) рассмотрен ранее однако переходный процесс имеет несколько другой вид: при ступенчатом отклонении руля высоты вверх с целью создания положительной перегрузки
) рассмотрен ранее однако переходный процесс имеет несколько другой вид: при ступенчатом отклонении руля высоты вверх с целью создания положительной перегрузки  в первый момент проявляется сила на руле высоты
в первый момент проявляется сила на руле высоты  , направленная вниз, что создает «просадку» по перегрузке.
, направленная вниз, что создает «просадку» по перегрузке.
1 время просадки,
2 время срабатывания,
3 время переходного процесса,
4 заброс.
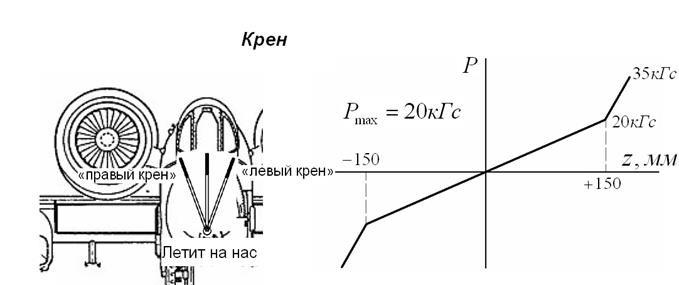
10.4. Основные показатели управляемости – усилия P и перемещения Х, создаваемые летчиком на ручке управления;
 .
.





Практическая работа №1
1. Измерение зависимости  стабилизатора от
стабилизатора от 
 |
2.
|
 на ручке управления от перемещения ручки
на ручке управления от перемещения ручки 

Летчик создает реальное усилие и двигает ручку управления по тангажу с обычной скоростью и останавливает ее на расстоянии  ,
,  ,
,  от нейтрали при движении на себя (кабрирование) и от себя (пикирование).
от нейтрали при движении на себя (кабрирование) и от себя (пикирование).
Зона нечувствительности
Замер зоны нечувствительности
Градиент усилия по перемещению

