




Действие гидравлических поглощающих аппаратов основано на протекании жидкости через калиброванные (дроссельные) отверстия из одной полости в другую, что создает упругое сопротивление при ударах в автосцепку. Для обеспечения восстановления аппарата в исходное состояние и быстрой подготовки его к восприятию последующих ударных нагрузок в качестве упругого элемента применяют инертный газ. Гидрогазовые поглощающие аппараты разработаны в двух вариантах: ГА-ЮМ и ГА-500. Гидравлический поглощающий аппарат ГА-100М (рис. 3.60, а) состоит из корпуса 7, имеющего цилиндрическую внутреннюю поверхность; нажимного поршня (стакана) 2, внутри которого размещен плавающий поршень 3; промежуточного дна 4, закрепленного в корпусе стопорными кольцами 7; второго плавающего поршня 5; штока б, который проходит через центральное отверстие промежуточного дна 4 и упирается одним концом в поршень 5. Другой конец штока меньшего диаметра свободно проходит в центральное отверстие днища поршня 2, в котором находятся дроссельные отверстия 8 и перепускные пазы 9. В аппарате имеются три основные полости А, В и С. Полость А низкого давления заполняется нейтральным газом — азотом при начальном давлении 0,4 МПа. Полость В заливается рабочей жидкостью АМГ. Полость С высокого давления заполняется нейтральным газом при начальном давлении 9 МПа. Под действием внешней нагрузки Т поршень 2 перемещается внутрь корпуса 7 вдоль неподвижного штока б. При этом рабочая жидкость через дроссельные отверстия 8 и пазы 9 перетекает из полости В в пространство B1, (рис. 3.60, б), воздействуя на плавающий поршень 3, перемещая его и сжимая газ в полости А. При дальнейшем движении днище поршня 2 упирается в выступ штока б, перекрывает пазы 9, увеличивая гидравлическое сопротивление аппарата. Затем под действием поршня 2 шток 6 начинает перемещаться, давит на плавающий поршень 5, преодолевая давление сжатого газа в полости С и сдвигая его вправо.

Таким образом, в полостях А и С повышается давление газа, что способствует сравнительно быстрому возвращению частей аппарата в исходное положение при снижении силы Т. Положительным качеством гидравлических аппаратов является более выгодная форма силовой характеристики (рис. 3.60, в). Здесь сила удара в процессе сжатия не имеет скачков, что обеспечивает плавное движение вагонов в поезде, а также при маневровых соударениях. Кроме того, чем больше скорость соударения, тем выше энергоемкость аппарата, то есть обеспечивается саморегулирование характеристик. Это следует из диаграммы (рис. 3.60, в), где скорости соударения V1 < V2 < V3. Гидравлический поглощающий аппарат ГА -500 (рис. 3.61) состоит из корпуса 2 и входящего в него плунжера 8. В аппарате две газовые А и Б и три гидравлические В, Г и Д камеры. Камеры В и Д разделены промежуточным дном 4, в котором укреплен регулирующий стержень 5, имеющий продольные профилирующие канавки. Газовая камера низкого давления А отделена от гидравлической камеры Д плавающим поршнем 3; 1 — заглушки заправочных отверстий.
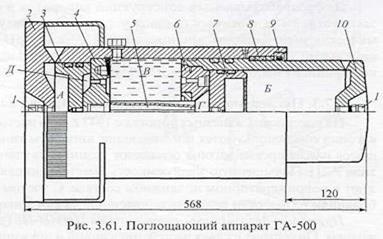
Гидравлические камеры В и Г разделены жестко закрепленной в плунжере 8 диафрагмой 6, которая снабжена центральным отверстием для пропуска регулирующего стержня 5 и дополнительными дроссельными отверстиями, перекрываемыми обратным клапаном. Связь гидравлических камер В и Д осуществляется также через дроссельные отверстия в промежуточном дне 4. Зарядка газовых камер азотом производится через штуцера 1, снабженные прямыми клапанами. Зарядное давление газа в камере А составляет 3,5 МПа, в камере Б— 9 МПа. Рабочей жидкостью в гидравлических камерах служит масло АМГ-10. Работа аппарата ГА-500 сводится к следующему. При воздействии на аппарат продольных сжимающих сил плунжер 10 входит внутрь корпуса 2, вытесняя жидкость из камеры В через отверстия жиклеров в промежуточном дне 4 в камеру Д и сжимая газ в камере А При дальнейшем перемещении плунжера 10 плавающий поршень 3 упирается в дно корпуса 2, жидкость из камеры В при этом через отверстия жиклеров в диафрагме 6 и профильные канавки штока 5 перетекает в камеру Г, перемещая плавающий поршень 7 и сжимая газ в камере Б. Перетекание жидкости через калиброванные отверстия создает сопротивление, зависящее от скорости приложения нагрузки к аппарату. После снятия с аппарата сжимающих сил давлением газа в газовых камерах А и Б на плавающие поршни 3 и 7 жидкость из камер Д и Г выжимается в камеру В, в результате чего происходит восстановление аппарата. Наличие в аппарате регулирующего элемента в виде стержня 5, имеющего профильные канавки, позволяет создавать необходимое сопротивление аппарата в зависимости от скорости соударения единиц подвижного состава, что обеспечивает улучшение условий его работы. Гидравлический аппарат ГА-500 может быть использован как для четырехосного так и для восьмиосного подвижного состава. Аппараты данного типа в отличие от пружинно-фрикционных не требуют приработки и реализуют свою максимальную энергоемкость с момента начала эксплуатации. Основные параметры рассмотренных выше поглощающих аппаратов приведены в табл. 3.8. Для разрабатываемых конструкций аппаратов в связи с перспективными условиями эксплуатации удлиненных поездов установлены следующие основные требования: динамическая энергоемкость при продольной силе 1,5 МН должна быть не менее 45 кДж; максимальный ход аппарата — 70—100 мм; сила начальной затяжки — в пределах 25—50 кН; коэффициент необратимого поглощения энергии — не менее 0,5.

