




В современном промышленном производстве все большее значение приобретает возможность оперативного доступа к достоверной и точной информации их любой точки управления производством, поскольку это определяющим образом влияет на эффективность работы предприятия, включая производительность труда, качество и конкурентоспособность выпускаемой продукции. Эта проблема решается путем создания интегрированной многоуровневой распределенной АСУ. Интегрированная система автоматизации предприятия может быть представлена в виде 5-уровневой пирамиды.
Нижний, нулевой уровень системы включает набор датчиков и исполнительных устройств, встраиваемых в конструктивные узлы технологического оборудования и предназначенных для сбора первичной информации и реализации исполнительных воздействий. Этот уровень называется уровнем I/O (ввода-вывода).
Первый уровень служит для непосредственного автоматического управления технологическими процессами с помощью различных УСО и ПК (промышленные контроллеры). Этот уровень получил название control (непосредственное управление).
Второй уровень, названный SCADA (Supervisory Control and Data Acquisition - сбор данных и диспетчерское управление), предназначен для отображения (или визуализации) данных в производственном процессе и оперативного комплексного управления различными агрегатами, в том числе и с участием диспетчерского персонала.
Третий уровень MES (Manufacturing Execution System) - средства управления производством - выполняет упорядоченную обработку информации о ходе изготовления продукции в различных цехах, обеспечивает управление качеством, а также является источником необходимой информации в реальном времени для верхнего уровня управления предприятием. Системы MES имеют ряд подсистем следующего назначения:
■ синтез расписаний производственных операций;
■ распределение ресурсов, в том числе распределение исполнителей по работам;
■ диспетчирование потоков заказов и работ;
■ управление документами, относящимися к выполняемым операциям;
■ оперативный контроль качества;
оперативная корректировка параметров процессов на основе данных о протекании процессов.
Современные АСУТП на базе промышленных контроллеров и SCADA-систем позволяют значительно повысить экономическую эффективность производства за счет повышения точности регулирования технологических режимов, снижения влияния человеческого фактора, применения развитых средств диагностики и противоаварийной автоматики, и т.д. Если рассматривать традиционную двухуровневую 


 информационную систему производственного предприятия «АСУТП - АСУП», то MES-решения занимают в ней промежуточное положение, выполняя роль поставщика, информации из АСУТП в АСУП и обратно. Данные из MES-системы могут быть интегрированы с другими системами для улучшения мониторинга, отслеживания динамики и выверки процесса производства. Они облегчают работу, как уровне управления, так и на производственных участках. Задачей АСУТП является улучшение работы одного процесса или технологической линии. MES-системы ориентированы на анализ того, как данный отдельный процесс влияет на производство в целом, они могут в зависимости от текущей рыночной ситуации оптимизировать это производство. Одной из наиболее сильных сторон MES-систем является то, что они позволяют комбинировать основные бизнес-цели предприятия и локальные производственные процессы наиболее эффективным образом.
информационную систему производственного предприятия «АСУТП - АСУП», то MES-решения занимают в ней промежуточное положение, выполняя роль поставщика, информации из АСУТП в АСУП и обратно. Данные из MES-системы могут быть интегрированы с другими системами для улучшения мониторинга, отслеживания динамики и выверки процесса производства. Они облегчают работу, как уровне управления, так и на производственных участках. Задачей АСУТП является улучшение работы одного процесса или технологической линии. MES-системы ориентированы на анализ того, как данный отдельный процесс влияет на производство в целом, они могут в зависимости от текущей рыночной ситуации оптимизировать это производство. Одной из наиболее сильных сторон MES-систем является то, что они позволяют комбинировать основные бизнес-цели предприятия и локальные производственные процессы наиболее эффективным образом.
Четвертый, верхний уровень управления определяется как MRP и ERP - планирование ресурсов предприятия. В России системы этого уровня больше известны под именем АСУП (автоматизированные системы управления предприятием). Они предназначены для автоматизации планирования производства и финансовой деятельности, снабжения и продаж, анализа и прогнозирования и т.д. Эту модель комплексной автоматизации предприятия можно упрощать, объединяя любые два соседних уровня, но принципиально подход остается одинаковым. Рассмотрим основные задачи, решаемые на различных уровнях управления.
В промышленные контроллеры {первый уровень) загружаются программы и данные из ЭВМ второго уровня, уставки, обеспечивающие координацию и управление агрегатом по критериям оптимальности управления технологическим процессом в целом, выполняется вывод информации на второй уровень управления служебной, диагностической и оперативной информации, т.е. данных о состоянии агрегата, технологического процесса. Особенность обмена информацией между первым и вторым уровнями состоит в высокой степени регулярности. Здесь применимы режимы обмена, соответствующие локальным промышленным сетям, которые в настоящее время выполняются в стандартах Bitbus, Profibus и т.п. Первый уровень управления реализуется, например, на промышленных контроллерах СМ1820М.ПК, ЭМИКОН, МИК, СИКОН и др. Второй уровень управления должен обеспечивать:
• диспетчерское наблюдение за технологическим процессом по его графическому отображению на экране в реальном масштабе времени;
• расчет и выбор законов управления, настроек и уставок, соответствующих заданным показателям качества управления и текущим показателям объекта управления;
• хранение и дистанционную загрузку управляющих программ в ПК;
• оперативное сопровождение моделей объектов управления типа «агрегат», «технологический процесс», корректировку моделей по результатам обработки информации от первого уровня;
• синхронизацию и устойчивую работу систем типа «агрегат» для группового управления технологическим оборудованием;
• ведение единой базы данных технологического процесса;
• контроль работоспособности оборудования первого уровня, переход на резервную схему в случае отказа отдельных элементов.
Второй уровень управления реализуется на базе специализированных промышленных УВК, например СМ1820М.ВУ или на базе ПЭВМ. Диспетчерский интерфейс реализуется SCADA-системами, например, широко известным пакетом InTouch фирмы Wonderware. Связь с контроллерами и приложениями в SCADA-системах обычно осуществляется посредством технологий DDE, OLE, OPC или ODBC. Машины второго уровня должны объединяться в однородную локальную сеть предприятия (типа Ethernet) с выходом на третий уровень управления. В качестве каналов связи используют последовательные промышленные шины Profibus, CANbus, Foundation Fieldbus и др. В SCADA-системах в основном применяют ОС UNIX или Windows NT.
Третий уровень характеризуется необходимостью решения задач оперативной упорядоченной обработки первичной информации из цеха и передачи этой информации на верхний уровень планирования ресурсов предприятия. Третий уровень реализуется на ПЭВМ.
Для решения задач четвертого уровня выбирают многопроцессорные системы повышенной производительности
57. Обозначения, таблица истинности и работа логических схем:
Абсолютно все цифровые микросхемы состоят из одних и тех же логических элементов – «кирпичиков» любого цифрового узла. Вот о них мы и поговорим сейчас.
Логический элемент – это такая схемка, у которой несколько входов и один выход. Каждому состоянию сигналов на входах, соответствует определенный сигнал на выходе.
Итак, какие бывают элементы?
Элемент «И» (AND)
Иначе его называют «конъюнктор».
Для того, чтобы понять как он работает, нужно нарисовать таблицу, в которой будут перечислены состояния на выходе при любой комбинации входных сигналов. Такая таблица называется «таблица истинности». Таблицы истинности широко применяются в цифровой технике для описания работы логических схем.
 Вот так выглядит элемент «И» и его таблица истинности:
Вот так выглядит элемент «И» и его таблица истинности:
Поскольку вам придется общаться как с русской, так и с буржуйской тех. документацией, я буду приводить условные графические обозначения (УГО) элементов и по нашим и по не нашим стандартам.
Смотрим таблицу истинности, и проясняем в мозгу принцип. Понять его не сложно: единица на выходе элемента «И» возникает только тогда, когда на оба входа поданы единицы. Это объясняет название элемента: единицы должны быть И на одном, И на другом входе.
Если посмотреть чуток иначе, то можно сказать так: на выходе элемента «И» будет ноль в том случае, если хотя бы на один из его входов подан ноль. Запоминаем. Идем дальше.
Элемент «ИЛИ» (OR)
По другому, его зовут «дизъюнктор».
Любуемся:
Опять же, название говорит само за себя.
 На выходе возникает единица, когда на один ИЛИ на другой ИЛИ на оба сразу входа подана единица. Этот элемент можно назвать также элементом «И» для негативной логики: ноль на его выходе бывает только в том случае, если и на один и на второй вход поданы нули.
На выходе возникает единица, когда на один ИЛИ на другой ИЛИ на оба сразу входа подана единица. Этот элемент можно назвать также элементом «И» для негативной логики: ноль на его выходе бывает только в том случае, если и на один и на второй вход поданы нули.
Едем дальше. Дальше у нас очень простенький, но очень необходимый элемент.
 Элемент «НЕ» (NOT)
Элемент «НЕ» (NOT)
Чаще, его называют «инвертор».
Надо чего-нибудь говорить по поводу его работы?
Ну тогда поехали дальше. Следующие два элемента получаются путем установки инвертора на выход элементов «И» и «ИЛИ».
Элемент «И-НЕ» (NAND)
 Элемент И-НЕ работает точно так же как «И», только выходной сигнал полностью противоположен. Там где у элемента «И» на выходе должен быть «0», у элемента «И-НЕ» - единица. И наоборот. Э то легко понять по эквивалентной схеме элемента:
Элемент И-НЕ работает точно так же как «И», только выходной сигнал полностью противоположен. Там где у элемента «И» на выходе должен быть «0», у элемента «И-НЕ» - единица. И наоборот. Э то легко понять по эквивалентной схеме элемента:

Элемент «ИЛИ-НЕ» (NOR)
Та же история – элемент «ИЛИ» с инвертором на выходе.
Следующий товарищ устроен несколько хитрее:
Элемент «Исключающее ИЛИ» (XOR)

 Он вот такой:
Он вот такой:
Операция, которую он выполняет, часто называют «сложение по модулю 2». На самом деле, на этих элементах строятся цифровые сумматоры.
Смотрим таблицу истинности. Когда на выходе единицы? Правильно: когда на входах разные сигналы. На одном – 1, на другом – 0. Вот такой он хитрый.
Эквивалентная схема примерно такая:
 Ее запоминать не обязательно.
Ее запоминать не обязательно.
 Собственно, это и есть основные логические элементы. На их основе строятся абсолютно любые цифровые микросхемы. Даже ваш любимый Пентиум 4.
Собственно, это и есть основные логические элементы. На их основе строятся абсолютно любые цифровые микросхемы. Даже ваш любимый Пентиум 4.
Далее мы позанудствуем о том, как синтезировать цифровую схему, имея ее таблицу истинности. Это совсем несложно, а знать надо, ибо пригодится (еще как пригодится) нам в дальнейшем.
Ну и напоследок – несколько микросхем, внутри которых содержатся цифровые элементы. Около выводов элементов обозначены номера соответствующих ног микросхемы. Все микросхемы, перечисленные здесь, имеют 14 ног. Питание подается на ножки 7 (-) и 14 (+). Напряжение питания – смотри в таблице в предыдущем параграфе.
58. Интегральные оценки качества САР:
Интегральные оценки дают обобщенную оценку быстроты затухания и величины отклонения регулируемой координаты, в виде единого числового значения.
Находят применение первые три ИТ-оценки из перечисленных в списке:
1. I 1 и I 2 – линейные ИТ-оценки (не чувствительны к высшим производным координат САР).
2. I и I ′ – квадратичные ИТ-оценки (первая не чувствительна к высшим производным координат САР; вторая – к неподвижному режиму).
3. I + T 12 I ′ – улучшенная квадратичная ИТ-оценка (чувствительна к постоянной и к скоростной составляющим в движении координат САР).
4. I + T 12 I ′+ T 24 I ″+… – ИТ-оценки более высоких порядков (чувствительны к постоянной составляющей в движении координат САР, к их скорости, к ускорению,...).
 Пусть имеем переходные функции h (t).
Пусть имеем переходные функции h (t).
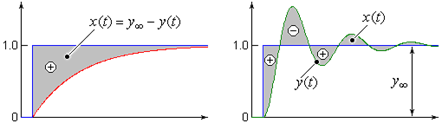 Рассмотрим линейные ИТ-оценки:
Рассмотрим линейные ИТ-оценки:
 .
.
Очевидно, что чем меньше значение оценки I 1 или I 2, тем лучше переходный процесс, но:
a. Оценка I 1 не может применяться к колебательному переходному процессу.
b. Аналитическое вычисление оценки I 2 по коэффициентам уравнения ошибки затруднено.
c. Одно значение оценки I 2 может соответствовать переходным процессам с разной колебательностью (если совпадают мажоранты и миноранты).
 Ограничения "a" и "b" для оценок I 1 и I 2 преодолеваются квадратичными ИТ-оценками I и I ′:
Ограничения "a" и "b" для оценок I 1 и I 2 преодолеваются квадратичными ИТ-оценками I и I ′:
 .
.
Заметим, что оценку I ′ можно получить нахождением оценки I, если подать на вход САР не ступенчатую 1(t), а дельта функцию δ(t)=1′(t). Применение оценки I ′ ограничено тем, что она не чувствительна к установившемуся значению ошибки x ∞.
 Ограничение "c" и другие ограничения оценок I 1, I 2, I и I ′ снимаются улучшенной квадратичной ИТ-оценкой:
Ограничение "c" и другие ограничения оценок I 1, I 2, I и I ′ снимаются улучшенной квадратичной ИТ-оценкой:
 ,
,
где: x 0 – начальное значение отклонения в переходном процессе; I + T 12 I ′ – не формула, а составной символ обозначения данной ИТ-оценки.
Очевидно, что I + T 12 I ′ будет минимальна при T 1 x ′+ x =(T 1 p +1) x =0. Решение этого ДУ есть экспонента: x (t)= x 0 e − t / T 1, а y (t)=1− x (t)= y 0(1− e − t / T 1).
Т.е. улучшенная квадратичная ИТ-оценка I + T 12 I ′ будет иметь минимум при приближении переходной функции к экспоненте с заданной постоянной времени T 1.
 Можно использовать улучшенные ИТ-оценки более высоких порядков. Например:
Можно использовать улучшенные ИТ-оценки более высоких порядков. Например:
 .
.
Здесь оценка будет иметь минимум, только при перемещениях координат САР с определенными скоростью и ускорением, которые задаются постоянными времени T 1 и T 2 соответственно. Идея другого способа выбора параметров оценки заключена в том, что коэффициенты ДУ второго порядка можно выразить в виде затухания ζ и резонансной частоты q, которыми должна обладать настраиваемая САР.

