




¬ «агальному випадку процес одержанн€ ћћ≈ включаЇ:
ü ¬иб≥р властивостей обТЇкта, €к≥ п≥дл€гають у в≥дображенн≥ обТЇкта, тобто визначаЇ степ≥нь ун≥версальност≥.
ü «б≥р ≥нфо про обран≥ властивост≥ обТЇкта-законом≥рност≥ функц≥онуванн€,дов≥дников≥ дан≥, необх≥дн≥ експериментальн≥ досл≥дженн€ ≥ тд
ü —творенн€ структури модел≥ мат вираз≥в, р≥вн€нь €к≥ описують в загальному випадку в≥дношенн€ м≥ж фазовими зм≥нними ≥ параметрами обТЇкта (тобто р≥вн€нн€ мат ф≥зики)
ü ќц≥нка точност≥ та розрахунок числових значень параметр≥в(м≥н≥м≥зац≥€ похибки заданоњ структури)
 (x)- точн≥ст ћћ
(x)- точн≥ст ћћ
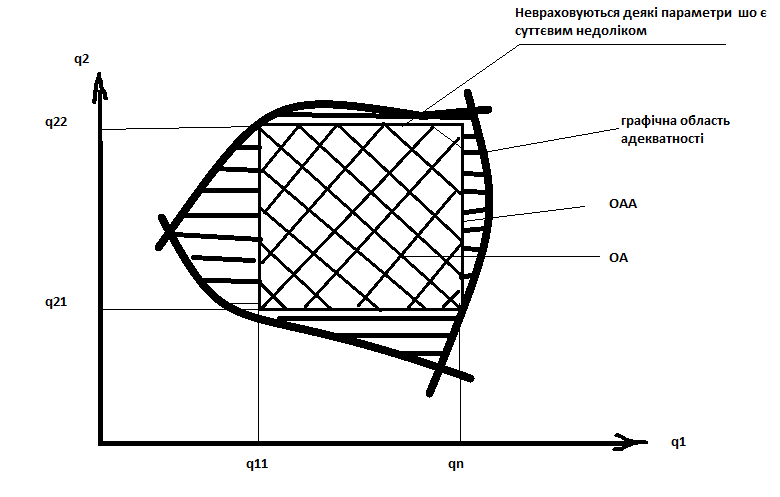
Ј ќц≥нка адекватност≥ ћћ пол€гаЇ в тому шо ми оц≥нюЇмо точн≥сть ћћ при певних значенн€х зовн≥шн≥х зм≥нних(а також вх≥дних значень).ƒл€ того щоб отримати ц≥ в≥домост≥ (вх≥дн≥ дан≥ при €ких модель працюЇ нормально необх≥дно побудувати область адекватност≥ в простор≥ зовн≥шн≥х парамет≥вQп в межах €ких похибка  неперевищуЇ заданого значенн€,€к правило ц€ область з нел≥н≥йними границ€ми ≥ потребуЇ складних обчислень.¬ межах вх≥дних параметр≥в ћћ видасть результат з потр≥бною точн≥стю.дл€ зменшенн€ обчислень використовують апроксимовану область адекватност≥ вписаний г≥пер-паралеп≥пед у задану область)
неперевищуЇ заданого значенн€,€к правило ц€ область з нел≥н≥йними границ€ми ≥ потребуЇ складних обчислень.¬ межах вх≥дних параметр≥в ћћ видасть результат з потр≥бною точн≥стю.дл€ зменшенн€ обчислень використовують апроксимовану область адекватност≥ вписаний г≥пер-паралеп≥пед у задану область)
ѕри одержанн≥ ћћ систем сл≥д використовувати б≥бл≥отеку з ћћ систем та мати дан≥ про структуру самоњ системи, €ка задаЇтьс€ у вигл€д≥ схеми або перел≥ку елемент≥в та њх взаЇмозвТ€зк≥в, €кщо дл€ де€ких тип≥в елемент≥в в≥дсутн≥ ћћ то дл€ них використовують розробку ≥ опис на вх≥дн≥й мов≥ з можливост€ми занесенн€ в б≥бл≥отеку елемент≥в.ѕри розробц≥ мат моделей сл≥д памТ€тати про однакову мову представленн€ внутр≥шн≥х представлень даних(пром≥жков≥ мову).ƒал≥ вудбуваЇтьс€ перетворенн€ цих вих≥дних даних в систему р≥вн€нь, з системи р≥вн€нь в алгоритм≥чну мову ≥ дал≥ в робочу програму дл€ розвинутих —јѕ– в≥дбуваЇтьс€ автоматично.
ѕ≈–≈“¬ќ–≈ЌЌя ћћ ¬ ѕ–ќ÷≈—≤ ќƒ≈–∆јЌяя –ќЅќ„»’ ѕ–ќ√–јћ јЌјЋ≤«”.
≥нцевий етап перетворень робоча програма у вигл€д≥ посл≥довност≥ елементарних под≥й арифметичних або лог≥чних операц≥й €к≥ реал≥зуютьс€ командами ≈ќћ.ѕроцес перетворенн€ ћћ €к≥ в≥днос€тьс€ до р≥зних ≥Їрарх≥чних р≥вн≥в ≥люструЇ:
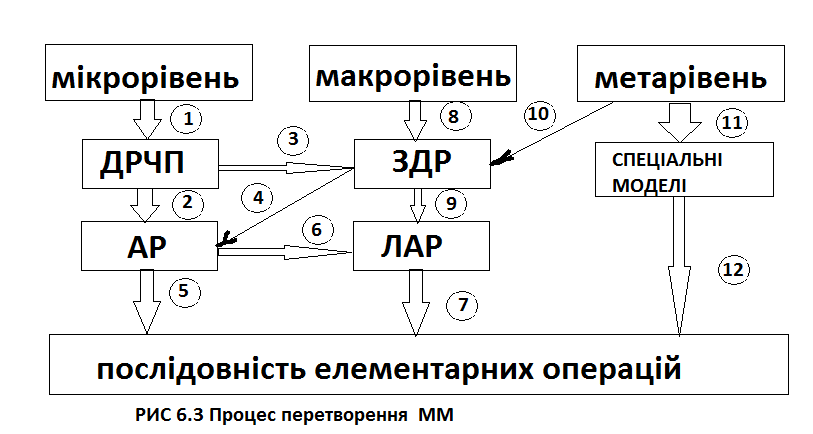
¬г≥лц≥ 1 в≥дпов≥даЇ постановка задач≥ €ка в≥дноситьс€ до макрор≥вн€ €к
ураЇвоњ,част≥ше всього у вигл€д≥ ƒ–„ѕ,чисельн≥ методи €кого заснован≥ на дескритизац≥њ зм≥нних та алгебрањзац≥њ задач.
ƒискритизац≥€-пол€гаЇ у зам≥н≥ неперервних зм≥нних, к≥нцевою множиною ≥х значень заданих дл€ досл≥дженн€ в просторовому ≥ часовому ≥нтервалах.
јлгебра≥зац≥€-пол€гаЇ у зам≥н≥ пох≥дних алгебраичними сп≥вв≥дношенн€ми.
ѕри розвитку ƒ–„ѕ використовують р≥зн≥ способи алгебрањзац≥њ ≥ дескритизац≥њ зм≥нних, ц≥ способи складають сутн≥сть метод≥в числового розв€зку.Ѕ≥льш≥сть ≥з них:к≥нцев≥ р≥зниц≥,-к≥нцев≥ елементи.
якшо ƒ–„ѕ стац≥онарне (описуЇ статичн≥ стани, то дискретизац≥€ ≥ алгебрањзац≥€ перетворюЇ ƒ–„ѕ в систему јЋ√≈Ѕ–јѓ„Ќ»’ р≥вн€нь в загальному випадку €к правило нел≥н≥йних-2
Z=(x1,x2,x3, t)-стац≥онарне.
якшо ƒ–„ѕ нестац≥онарне описуЇ зм≥нн≥ в час≥ пол€ зм≥нних то алгебра≥зац≥ю ≥ дискретизац≥ю представл€ють у 2 етапи:
|
|
|
Ј ”суваютьс€ пох≥дн≥ по просторовим координатам
Z=(x1,x2,x3, t)-«ƒ–- 3
Ј ”суненн€ пох≥дних по часу-ј–-4
ƒл€ чисельного розв€зку «ƒ– при початкових умовах (задача ош≥) розроблено велику к≥льк≥сть чисельних метод≥в,методи чисельного ≥нтегруванн€.
–озв€зок системи ј– може бути або безпосередн≥м-5, за допомогою простих ≥нтеграц≥й «ейдел€,якоб≥. јбо через попередню л≥неаризац≥ю-6, що складаЇ сутн≥сть метод≥в Ќютона,розв€зок системи л≥н≥йних алгебраичних р≥вн€нь-Ћј–-7,¬» ќЌ”™“№—я за допомогою пр€мих метод≥в:ћетоди рамера,√ауса.
√≥лц≥ 8 в≥дпов≥даЇ перетворенн€ початкового опису €ка використовуЇтьс€ до макрор≥вн€, в систему «ƒ– ≥з в≥домими початковими умовами.якшо «ƒ– Цнел≥н≥йна, то подальш≥ перетворенн€ в≥дбуваютьс€ за охарактеризованими вище:4-5;4-6-7;
якщо ж «ƒ– л≥н≥йна то доц≥льний безпосередн≥й перех≥д в систему Ћј–-9
ƒо анал≥зу обТЇкт≥в на мета р≥вн≥:
Ј ѕерех≥д до системи «ƒ–-10
Ј ѕерех≥д до системи спец≥альних моделей:лог≥чн≥,анал≥тичн≥ ≥тд.
як≥ спрощено в≥дображають техн≥ко економ≥чн≥ показники обТЇкта-11
12- зведенн€ цих форм моделей до посл≥довност≥ елементарних операц≥й не викликаЇ н≥€ких труднощ≥в.—казане вказуЇ важливе значенн€ €ке в≥дводитьс€ в математичному забезпеченн≥ —јѕ– чисельними методом розв€зку.—истеми «ƒ– нел≥н≥йних та л≥н≥йних ј–.¬≥д ефективност≥ цих метод≥в залежить загальна активн≥сть виконанн€ проектних процедур функц≥онального проектуванн€.
ћетоди оптим≥зац≥њ.
1.методи оптим ≥зац≥й сутн≥сть та види, значна частина заданих оптим≥зац≥й в≥дноситьс€ до задач нел≥н≥йного програмуванн€, в цих задачах використовують алгоритм≥чн≥ задач≥, модел≥ шо обумовлюють необх≥дн≥сть пошуковоњ оптим≥зац≥њ, пошукова оптим≥зац≥€ пол€гаЇ у визначенн≥ малого околу точки х* в област≥ допуску параметр≥в хд, на основ≥ розрахунку ц≥льовоњ функц≥њ F(x) та функц≥њ обмеженн€, посл≥довн≥сть в≥дображаючих похибок визначаЇтьс€ методом пошуку екстрена.ћетоди оптим≥зац≥њ(пошук екстрена, можна шукати за наступними ознаками.: ≥льк≥сть керованих параметр≥в: за ц≥Їю ознакою методи оптим≥зац≥њ под≥л€ють на методи одном≥рного та багатом≥рного пошуку.€к правило метод одном≥рного пошуку граЇ лише допом≥жну роль в задачах програм, де к≥льк≥сть керованих параметр≥в звичайно знаходитьс€ в межах в≥д дек≥лькох одиниць до дек≥лькох дес€тк≥в, взалежност≥ в≥д характеристик екстрена на €кий ор≥Їнтований параметр розр≥зн€ють методи:безумовноњ, умовноњ, локальноњ та глобальноњ оптим≥зац≥њ.¬залажност≥ в≥д характеру ≥нформац≥њ,€ка використовуЇтьс€ дл€ вибору напр€мку пошуку, розр≥зн€ють:методи:0,1,2-го пор€дк≥в.
¬метод≥ 1-го пор€дку використовуютьс€ перш≥ пох≥дн≥ цв≥левоњ функц≥њ по керованим параметрам(складають вектор град≥Їнт цв≥левоњ функц≥њ) тому ц≥ методи також називають град≥Їнтними методами.
ћетоди 2 го пор€дку, кр≥м пох≥дних першого пор€дку використовуютьс€ ≥ пох≥дн≥ 2-го пор€дку,€к≥ складають матрицю √есе(квадратна матриц€ елементами €коњ Ї частков≥ пох≥дн≥ де€коњ функц≥њ)‘ормально нехай д≥йсну функц≥ю в≥д n зм≥нних:f(x1,x2,xn),€кшо у ц≥Їњ функц≥њ ≥снують вс≥ пох≥дн≥ 2 Цго пор€дку то можна визначити матрицю √есе.  (x)=
(x)= 
¬ методах 0-го пор€дку пох≥дн≥ не використовуютьс€. “аким чином зм≥стом будь €кого методу або алгоритму пошуковоњ оптим≥зац≥њ повинн≥ бути способи вибору:1.напр€мку пошуку,2.виб≥р кроку(значенн€ кроку),3‘ормули дл€ нормуванн€ керованих параметр≥в.(ќск≥льки керован≥ параметри р≥зн≥ ф≥зичн≥ величини то дл€ можливост≥ њх пор≥вн€нн€ необх≥дно пор≥вн€ти у в≥носних одиниц€х.
|
|
|
ритер≥њ зак≥нченн€ пошуку
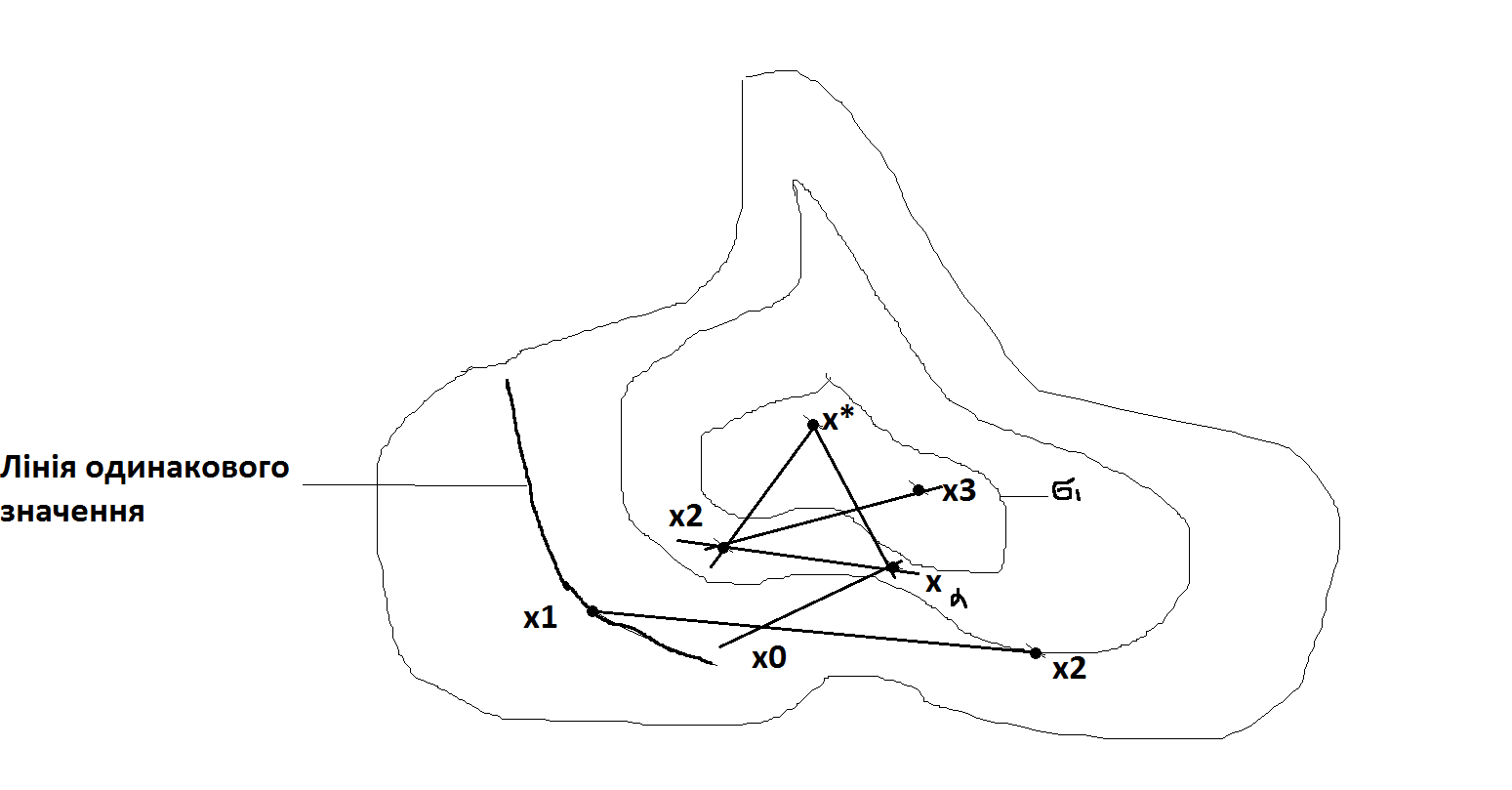
ѕри зображенн≥ геометрично р≥зних метод≥в пошуку, значенн€ ц≥льових функц≥й, зображенне л≥н≥€ми однакового р≥вн€(в межах 1 го р≥вн€ функц≥онуЇ приймаЇ однаков≥ значенн€),сам пошук в≥дображенн€ в≥др≥зку €кий зТЇднують точки.
ћетоди безумовноњ оптим≥зац≥њ
–озгл€немо основн≥ параметри пошуку безумовних локальних екстремум €к≥ використовуютьс€ в —јѕ–, вважаЇмо що виконанн€ задач м≥н≥м≥зац≥њ цв≥левоњ функц≥њ minF(X),X™Xд
рок в простор≥ керованих параметр≥в в цих методах задаЇтьс€ формулою:
 =
=  +
+ 
-прир≥ст кроку,  -попередн≥й крок,
-попередн≥й крок,  -даний крок.
-даний крок. 
 -значенн€ кроку,p-напр€м пошуку(вектор €кий вказуЇ напр€м),
-значенн€ кроку,p-напр€м пошуку(вектор €кий вказуЇ напр€м),  - норма вектору,х-в≥дображаюча точка, h-≥ндекс кроку,виб≥р значенн€ цього кроку може зд≥йснюватис€ 2 методами.
- норма вектору,х-в≥дображаюча точка, h-≥ндекс кроку,виб≥р значенн€ цього кроку може зд≥йснюватис€ 2 методами.
1.метод значенн€ кроку при €кому значенн€ кроку вибираЇтьс€ на початку ≥ не зм≥нюЇтьс€.
2.метод оптимального кроку тут дл€ вибору кроку розвТ€зуЇтьс€ задача одном≥рноњ м≥н≥м≥зац≥њ цв≥левоњ функц≥њ на промен≥ з напр€мком gk.
MinF( + - gk).«ак≥нченн€ пошуку пов€зуЇтьс€ з попаданн€м в заданий  -ок≥л оптимальноњ точки х*{{xk-x*}}
-ок≥л оптимальноњ точки х*{{xk-x*}} 
ритер≥й р≥зниц€ м≥ж останн≥м кроком ≥ оптимальноюточкою менша  проте оск≥льки х* Ї нев≥домим то €к правило в ≥терац≥йних методах зам≥сть умови:{{xk-x*}} виконуЇтьс€ умова, {{xk-xk-r}}
проте оск≥льки х* Ї нев≥домим то €к правило в ≥терац≥йних методах зам≥сть умови:{{xk-x*}} виконуЇтьс€ умова, {{xk-xk-r}}
ƒе r число €ке розд≥л€Ї кроки  , €к правило його приймають р≥вним к≥лькост≥ керованих параметр≥в тобто пошук припин€Їтьс€ у випадку, €кщо в≥дстань на €ку просунулась в≥дображаЇмо точка за 2 останн≥ кроки ви€вл€Їтьс€ меншою заданого значенн€ .
, €к правило його приймають р≥вним к≥лькост≥ керованих параметр≥в тобто пошук припин€Їтьс€ у випадку, €кщо в≥дстань на €ку просунулась в≥дображаЇмо точка за 2 останн≥ кроки ви€вл€Їтьс€ меншою заданого значенн€ .
ћетоди нульового пор€дку
ƒо метод≥в нульового пор€дку в≥днос€тьс€ методи заснован≥ на перебор≥ обмеженоњ множини обраних напр€мк≥в пошуку або на вигл€д новому вибор≥.1метод-покоординатного спуску(метод √ауса-«ейдел€).2.напр€м пошуку вибираЇтьс€ почергово вздовж вс≥х координатних в≥сей.ѕоложенн€ одиничного вектора м≥н€Їтьс€ в≥д кроку до кроку.«наченн€ кроку h-вибираЇтьс€ за методом оптимального кроку.(Ќапр€мок, вздовж координатних осей)
¬ умов≥ зак≥нченн€ пошуку р≥вн€н€ {{xk-xk-r}} , r-приймаЇтьс€ р≥вним розм≥рност≥ простору.
ћетод конф≥гурац≥й.
ƒаний метод включаЇ в себе виконанн€ цикл≥в ≥з n-крок≥в по координатного спуску.ѕ≥сл€ кожного циклу, робитьс€ 1 додатковий крок в напр€мку, €кий зТЇднуЇ точки початку ≥ зак≥нченн€ циклу.
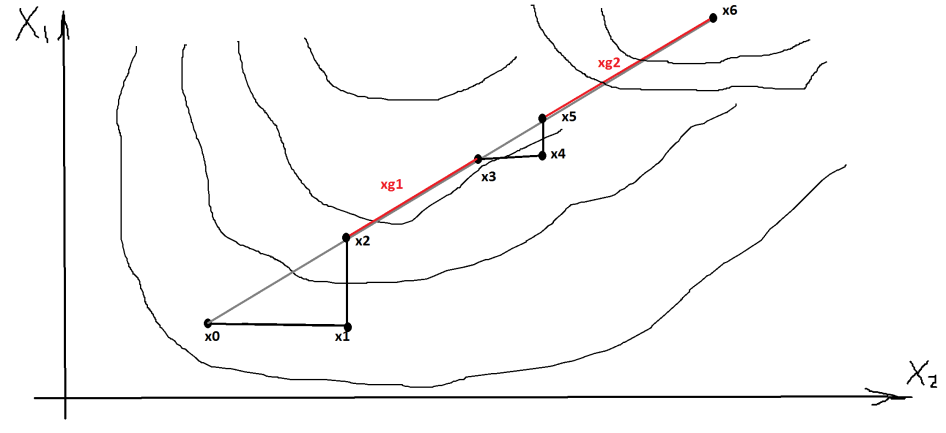
Xg- додатковий крок,€кий зТЇднуЇ напр€мок ≥ початок циклу.
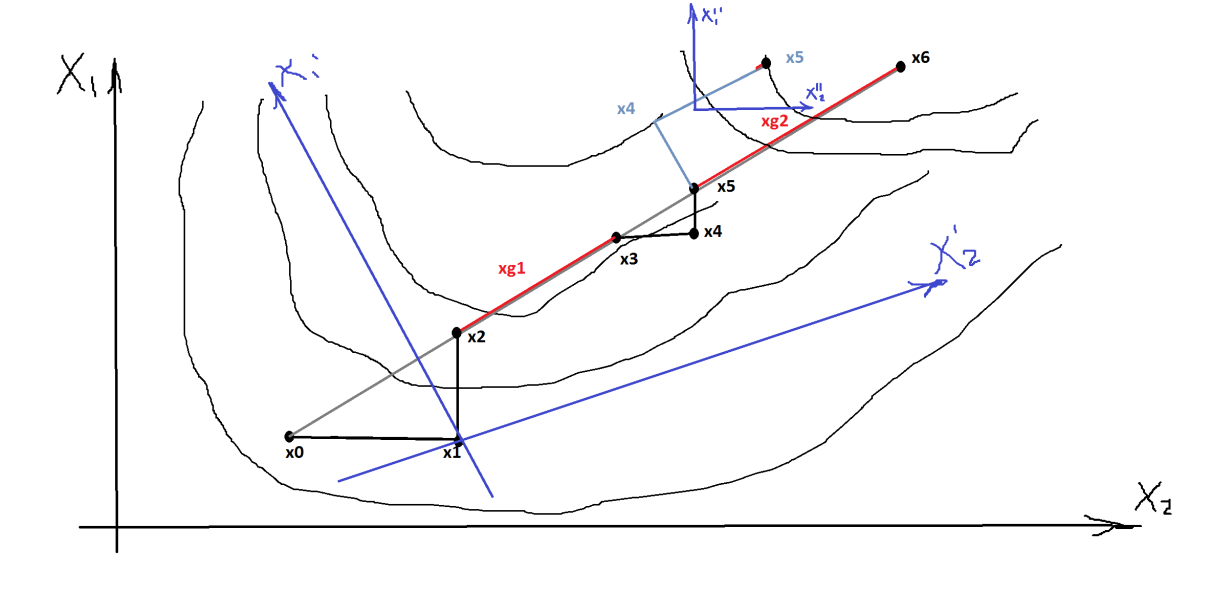
ћетод –озенброка
( повертанн€ координатних осей).¬даному метод≥ реал≥зована ≥де€ повороту координатних осей за методом конф≥гурац≥й.ѕ≥сл€ кожного додаткового кроку за вказаним методом зд≥йснюЇтьс€ поворот координатних осей таким чином щоб одна з координатних осей ви€вилась паралельною напр€мку додаткового кроку.«г≥дно даного методу вважаЇтьс€,що за менше число крок≥в знаходимо ок≥л оптимальноњ точки дельта 1.
ћетоди 1-го пор€дку
¬даних методах виконанн€ кожного кроку б≥льш трудом≥стке н≥ж в методах нульового пор€дку, оск≥льки дл€ виконанн€ кожного кроку обчислюЇтьс€ град≥Їнт ц≥льовоњ ф-≥њ.grad F(Xk-1), Xk-1-результат попереднього кроку, grad-зм≥на, найб≥льш швидка €когось параметру.
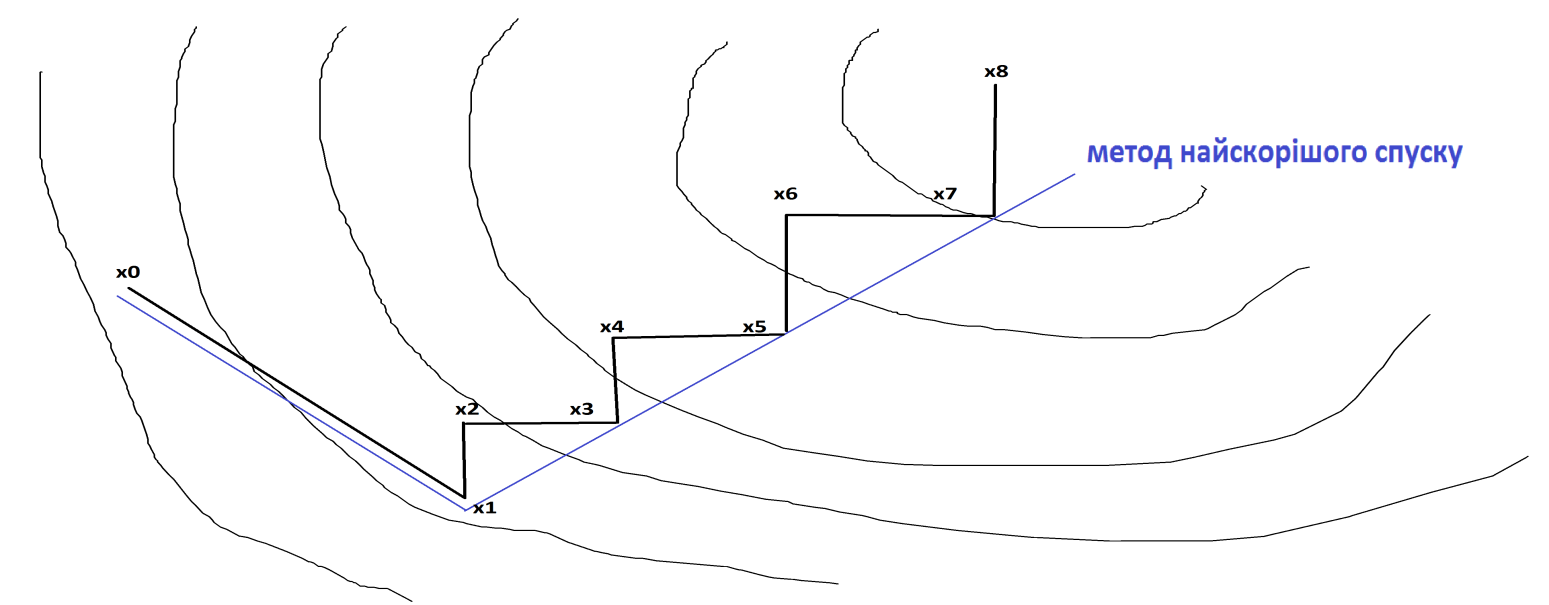
1 метод.ћетод найвищого спуску, напр€м пошуку Ї напр€мом найскор≥шого зменшенн€ ц≥льовоњ функц≥њ F(x),Pk=-grad F(xk-1),де grad F(xk-1)-вектор град≥Їнт в т х (х1,х2,х3Е),
grad F(X)-пох≥дн≥(dF/dx1, dF/dx2,Е)ƒл€ зак≥нченн€ пошуку використовуЇтьс€ критер≥й, в €кому r=1.5
напр€м пошуку на двох сус≥дн≥х кроках ортогональний.
ћетод спр€жених град≥Їнт≥в
Ќапр€м пошуку за даним методом знаходитьс€ за формулою:–к=-grad F(Xk-1+ 
 -коеф≥ц≥ент €кий враховуЇ попередню историю пошуку, завд€ки цьому, згладжуЇтьс€ траЇктор≥€ пошуку ≥ швидше дос€гаЇтьс€ екстремум.
-коеф≥ц≥ент €кий враховуЇ попередню историю пошуку, завд€ки цьому, згладжуЇтьс€ траЇктор≥€ пошуку ≥ швидше дос€гаЇтьс€ екстремум.  -напр€мок попереднього кроку,
-напр€мок попереднього кроку,  напр€мок даного кроку.
напр€мок даного кроку.
ћетоди умовноњ оптим≥зац≥њ
—тосовно до розв€зку задач умовноњ оптим≥зац≥њ представленоњ у вигл€д≥:minF(X),’д
|
|
|
’Ї’д, при ’д={x l(при) 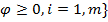
ћетод штрафних функц≥й
¬ ÷№ќћ” ћ≈“ќƒ≤ при ’д={x l(при) « обмеженим  перетворюЇтьс€ в задачу безумовноњ оптим≥зац≥њ(без обмежень),п≥сл€ цього стаЇ можливим застосуванн€ метод≥в пошуку безумовних екстремум≥в(метод найвищого спуску спр€жених град≥Їнт≥в,–озомброка ≥ тд)¬метод≥ штрафних функц≥й першопочаткова функц≥€ ‘(х) зам≥нюЇтьс€ на нову функц≥ю
перетворюЇтьс€ в задачу безумовноњ оптим≥зац≥њ(без обмежень),п≥сл€ цього стаЇ можливим застосуванн€ метод≥в пошуку безумовних екстремум≥в(метод найвищого спуску спр€жених град≥Їнт≥в,–озомброка ≥ тд)¬метод≥ штрафних функц≥й першопочаткова функц≥€ ‘(х) зам≥нюЇтьс€ на нову функц≥ю 
 функц≥€, при виконанн≥ обмежень пр€муЇ до нул€.
функц≥€, при виконанн≥ обмежень пр€муЇ до нул€.  l
l  l
l  i
i  .
.
ѕри порушенн≥ обмежень  зб≥льшуЇтьс€, шо приводить до р≥зкого зб≥льшенн€
зб≥льшуЇтьс€, шо приводить до р≥зкого зб≥льшенн€  , тобто компенсуЇтьс€ порушенн€ умови ≥ таким чином можна використовувати бузумовну оптим≥зац≥ю.
, тобто компенсуЇтьс€ порушенн€ умови ≥ таким чином можна використовувати бузумовну оптим≥зац≥ю.
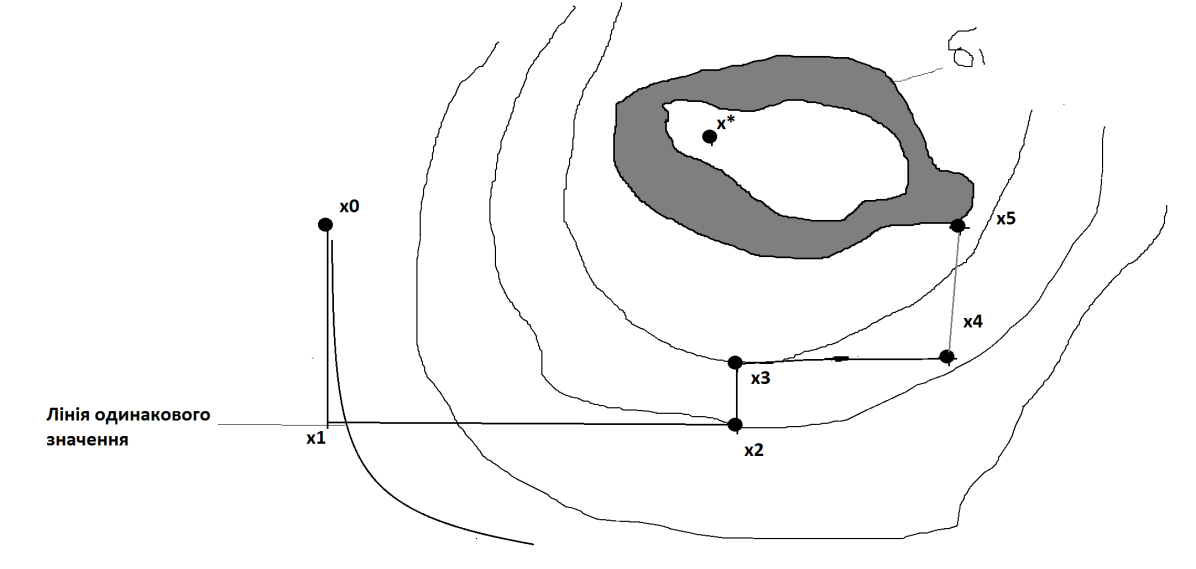
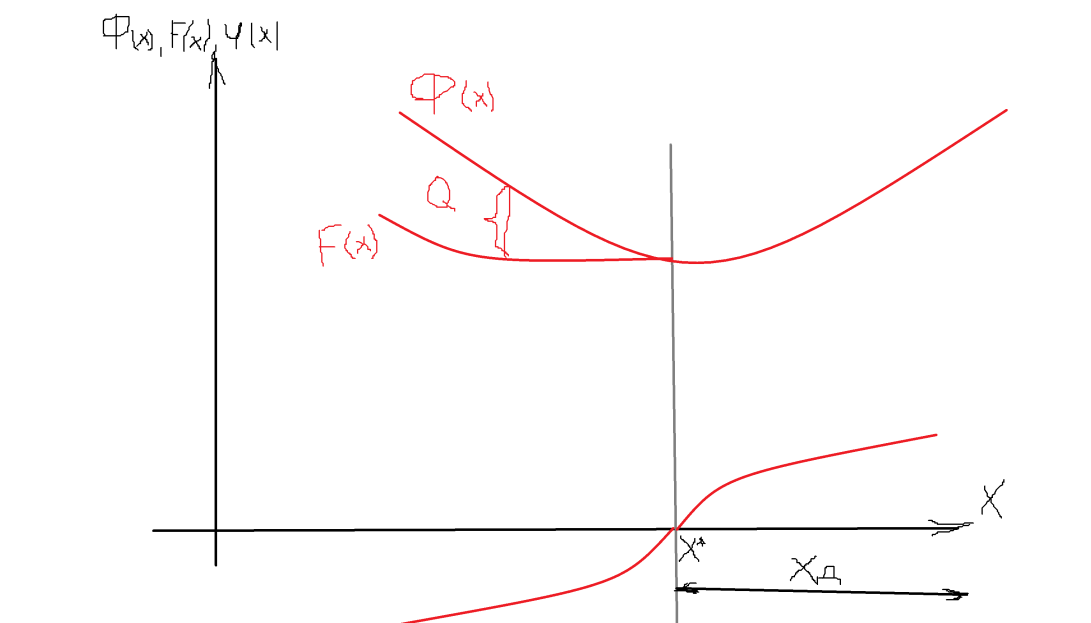
ћетод проекц≥й вектор град≥Їнт.
Min F(X);Xд={xl  ¬даному метод≥ застосовуЇтьс€ задача оптим≥зац≥њ стосовно обмежень типу р≥вностей.ƒаний метод волод≥Ї високою ефективн≥стю, в процес≥ пошуку екстремума використовують кроки 2 тип≥в.
¬даному метод≥ застосовуЇтьс€ задача оптим≥зац≥њ стосовно обмежень типу р≥вностей.ƒаний метод волод≥Ї високою ефективн≥стю, в процес≥ пошуку екстремума використовують кроки 2 тип≥в.
1типу Цзабезпечують виконанн€ обмежень використовуютьс€ в тих випадках коли обмеженн€ пом≥тно порушен≥ тобто,  ,
,  роки першого типу використовуютьс€ в напр€мку до нормал≥ г≥перповерхн≥ обмежень, спуск на г≥перповерхню обмежень на рис, кроки х1,х3,х5,х7.
роки першого типу використовуютьс€ в напр€мку до нормал≥ г≥перповерхн≥ обмежень, спуск на г≥перповерхню обмежень на рис, кроки х1,х3,х5,х7.
роки другого типу-зд≥йснюютьс€ дл€ того щоб просуватис€ до умовного екстремуму(в напр€мку дотичноњ до г≥перповерхн≥ обмежень, до тих п≥р поки не порушуютьс€ обмеженн€ х2,х4,х6, дан≥ методи повинн≥ мати механ≥зм, €кий дозвол€Ї у випадку перетинанн€ т≥л повних обмежень повернутис€ за цю л≥н≥ю назад.
“ехн≥чне забезпеченн€ —јѕ–
1.—клад техн≥чного забезпеченн€ техн≥чних засоб≥в та вимоги.
2.–≥вн≥ техн≥чного забезпеченн€ —јѕ–
3.—труктура технвчного забезпеченн€ —јѕ–.(локальн≥ обчислюван≥ мереж≥)
1.“ехн≥чне забезпеченн€ —јѕ– служить дл€ забезпеченн€ роботи, основних вид≥в забезпеченн€ —јѕ–,я¬Ћя™ —ќЅќё сокупн≥сть техн≥чних пристроњв, серед €ких вид≥л€ють наступн≥ 5 груп.
ѕристоњ програмноњ обробки даних(м≥кропроцесори,оперативн≥ запамТ€товуюч≥ пристроњ,оперативна пам'€ть.)
-ѕристроњ п≥дготовки≥ вводу даних:дисководи,флешки,сканери, принтери,д≥г≥тайзери.
ѕристоњ вводу ≥нформац≥њ:ѕринтер,плотер(принтер ј1,ј2 формату,широкоформатниий)
ѕринтери-матричний(до сих п≥р використовуЇтьс€ в банках),встроений,лазерний.ј÷ƒѕ-аналоговий цифровий друкуючий пристр≥й),фотонаборн≥ установки.ј÷ƒѕ-той же самий принтер малого розм≥ру(≥нформац≥€ передаЇтьс€ аналоговому вигл€д≥≥ передаЇтьс€ в лог≥чний 0 або 1.ѕристр≥й взаЇмод≥њ людини з ≈ќћ(вив≥д та вв≥д ≥нформац≥њ в ≥теративному режим≥):миш≥,клав≥атура,св≥тлове перо,с≥т≥лус,татч скр≥пи(Їмн≥сн≥ резистивн≥ –S-ћј“–»÷≤).ѕристроњ передач≥ даних:обчислюван≥ мереж≥,р≥зн≥ формати безпров≥дноњ передач≥ даних.(≤ -порт,вайфай,блютуз).—клад ≥ обЇм р≥зних пристроњв визначають виход€чи з такихњ вимог:достатн€ продуктивн≥сть,Їмн≥стьпам€т≥,доступ до потр≥бноњ ≥нформац≥њ, та зв'€зок м≥ж проектувальниками.
2.–≥вн≥ техн≥чного забезпеченн€ —јѕ–
—труктура техн≥чного забезпеченн€ —јѕ– на великих та середн≥х п≥дприЇмствах багатор≥внева,вид≥л€ють наступн≥ р≥вн≥:
1.р≥вень центральне обчисленн€ комплекса дл€ розв€зку найб≥льш складних в обчислювальному в≥дношенн≥ задач р≥вн€нь математичноњ ф≥зики,моделюванн€ та ≥нш≥ €к≥ потребують великих обТЇм≥в обчислень.
2.р≥вень ≥нтерактивного граф≥чного комплексу, призначений дл€ оперативноњ взаЇмод≥њ з проектувальником, складаЇтьс€ з дек≥лькох ѕ“ , типовий ѕ“ €вл€Ї собою автоматизоване робоче м≥сце(ј–ћ),€ке складаЇтьс€ ≥з самого компютора, мон≥тор, системний блок та перифер≥йного обладнанн€ дл€ роботи проектувальника-мережеве та локальне.¬се залежить в≥д економ≥чноњ активност≥.ј–ћ под≥л€ють на ун≥версальн≥ та спец≥ал≥зован≥,в≥дкрит≥ та закрит≥. ун≥версальн≥- системи €к≥ мають в своњй основ≥ ун≥версальн≥ засоби,2-ох,3-ох м≥рноњ граф≥ки в €ких адаптац≥€ до конкретних областей застосуванн€, зд≥йснюЇтьс€ шл€хом включенн€ в них пакет≥в прикладних програм.
|
|
|
—пец≥ал≥зован≥ ј–ћ- система в €ких машинна граф≥ка ≥нформуЇ забезпеченн€ а ≥нод≥ тех. «асоби жорстко звТ€зан≥ з обТЇктом проектуванн€(компас, APM-WIN MACHIN)
¬≥дкрит≥ ј–ћ-—»—“≈ћ» я ≤ ƒќѕ”— јё“№ участь користувача в розвитку тех. «асоб≥в, закрит≥ -недозвол€ють або це повТ€зано з незначними складност€ми.
3.р≥вень- –≥вень тех комплексу дозвол€Ї виготовл€ти р≥зну продукц≥ю на програмно керованому обладнанн≥(р≥зн≥ роботизован≥ л≥н≥њ, верстати з “ѕ )(TESLA ј¬“ќћќЅ≤Ћ≤). оли техн≥чне забезпеченн€ —јѕ– розташовано у р≥зних прим≥щенн€х на територ≥њ п≥дприЇмства або у тих випадках коли необх≥дний одночасний доступ дек≥лькох користувач≥в до певних ≥нформац≥йних ресурс≥в, то вс≥ техн≥чн≥ засоби доц≥льно обТЇднувати у локально обчислювану мережу.
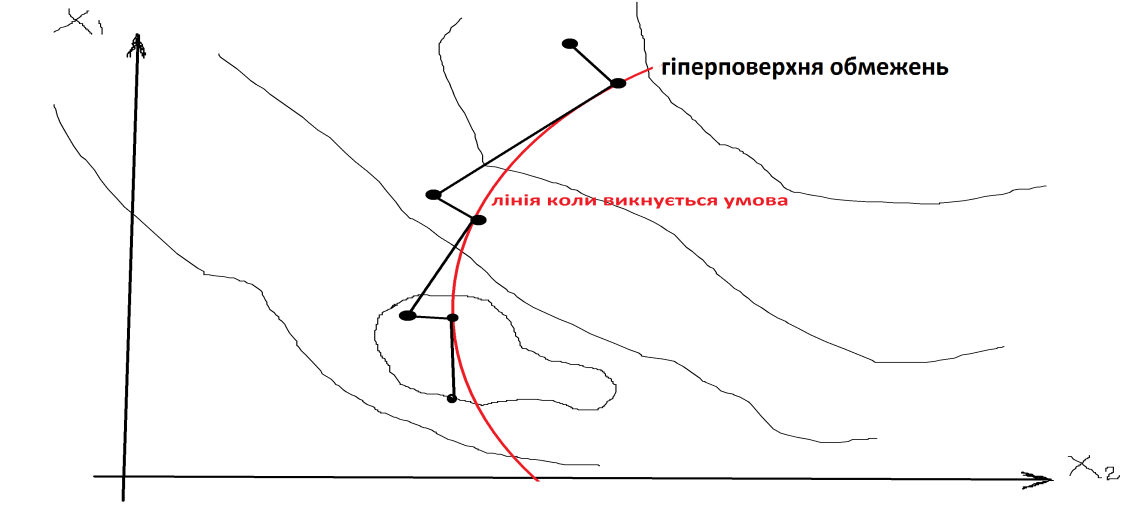
Ћќћ характеризуЇтьс€ ¬Ћј—“»¬ќ—“яћ»:розташуванн€ на обмежен≥й територ≥њ, висока швидкод≥€, низька варт≥сть засоб≥в передач≥ ≥нформац≥њ у цифров≥й форм≥, економ≥чна ефективн≥сть.’арактеристики Ћќћ визначаЇ розташуванн€ вузл≥в ≥ зЇднань м≥ж ними найб≥льш поширен≥ 3 наступн≥ типолог≥њ:з≥ркова(рад≥альна), к≥льцева, шинна.
1.«≥ркова тополог≥€ х-с€ тим що вс≥ вузли п≥дЇднуютьс€ до центрального вузла або сервера(окремою л≥н≥Їю звТ€зку.)ѕереваги: простота, центральний вузол(÷¬) маЇ просту фресац≥ю.«–”„Ќќ коли багато канал≥в ≥ один обслуговував центру.ƒана типолог≥€ забезпечуЇ нап≥вшинний ступ≥нь захисту ≥ незалежн≥сть швидкод≥њ в≥д ≥нших вузл≥в.Ќ≈ƒќЋ≤ »: над≥йн≥сть системи залежить в≥д центрального вузла, надзвичайно висока довжина л≥н≥й звТ€зку, пропускна здатн≥сть з  алежить в≥д швидкод≥њ центрального вузла.
алежить в≥д швидкод≥њ центрального вузла.
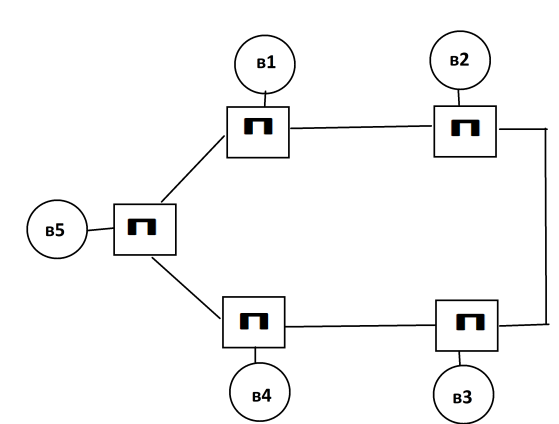 2.к≥льцева с кладаЇтьс€ з вузл≥в прийому передавач≥в що п≥дЇднуЇтьс€ до загальноњ мереж≥ ≥ керуЇ.ѕринцип роботи:прийом ≥ передача даних по к≥льцу ≥ доступ до л≥н≥й звТ€зку вузла €кий до нього п≥дЇднаний.як правило ≥нформац≥€ передаЇтьс€ по одному напр€мку в к≥льц≥.¬протокол≥ передач≥ даних Ї ≥нформац≥€ про в≥дправник ≥ адресат, при €кому, €кшо адресат неотримуЇ ≥нформац≥ю вузол в≥дправленн€ вилучаЇ њњ з к≥льца.
2.к≥льцева с кладаЇтьс€ з вузл≥в прийому передавач≥в що п≥дЇднуЇтьс€ до загальноњ мереж≥ ≥ керуЇ.ѕринцип роботи:прийом ≥ передача даних по к≥льцу ≥ доступ до л≥н≥й звТ€зку вузла €кий до нього п≥дЇднаний.як правило ≥нформац≥€ передаЇтьс€ по одному напр€мку в к≥льц≥.¬протокол≥ передач≥ даних Ї ≥нформац≥€ про в≥дправник ≥ адресат, при €кому, €кшо адресат неотримуЇ ≥нформац≥ю вузол в≥дправленн€ вилучаЇ њњ з к≥льца.
ѕ≈–≈¬ј√»: в≥дсутн≥сть залежност≥ в≥д роботи ÷¬, дуже проста маршрутизац≥€,несправн≥ вузли,можуть бути легко ≥дентиф≥кован≥.
Ќ≈ƒќЋ≤ »: швидк≥сть передач≥ в≥дносно невелика, залежн≥сть швидкост≥ мереж≥ в≥д однакових тип≥в мереж≥.
Ў»ЌЌј ћ≈–≈∆ј.
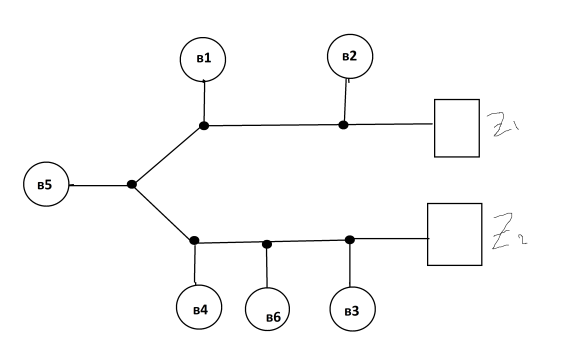
Z1,z2-узгоджуюч≥ навантаженн€.Ўинна мережа характеризуЇтьс€ тим шо ≥нформац≥€ керуЇтьс€ у шину через вузли ≥ доступаЇ до вс≥х вузл≥в, шо п≥дЇднан≥ до шини ≥ шинн≥й мереж≥,передача ≥нформац≥њ зд≥йснюЇтьс€ 2 способами.:1.немодульованим сигналом, що €вл€Ї собою нул≥ та одиниц≥.2.модульованим сигналом.
ѕередача модульованих сигнал≥в дуже схожа на рад≥оканал, у €кому дл€ р≥зних рад≥останц≥й вид≥л€ютьс€ р≥зн≥ низьк≥ частоти.—пособи оптим≥зац≥њ часового розд≥ленн€ шини складають сутн≥сть р≥зних метод≥в доступу до шини.
ѕ≈–≈¬ј√»: недоступн≥сть до мереж≥, можлив≥сть нових п≥дключень, ефективна пропускна здатн≥сть.
Ќ≈ƒќЋ≤ »: в≥дсутн≥й р≥вном≥рний розпод≥л м≥ж ресурсами обмеженн€ довжини л≥н≥й звТ€зку(використовують п≥дсилювач≥ сигнал≥в). ≥нтернет побудован≥ по способу передач≥ модульованих сигнал≥в.
≤Ќ‘ќ–ћј÷≤…Ќ≈ «јЅ≈«ѕ≈„≈ЌЌя.
≤нформац≥йне забезпеченн€ —јѕ– складаЇтьс€ з ≥нформац≥йного фонду ≥ засобу керуванн€ фондом ≥нформац≥йний фонд включаЇ в себе ≥нформац≥йно необх≥дну дл€ виконанн€ автоматизованого проектуванн€.—истема керуванн€ ≤‘ забезпеченн€, збер≥ганн€ ≥ доступ до ≥нформац≥њ.
ѕризначенн€ Ѕанк≥в даних-≤‘ може орган≥зувати у вигл€д≥ файловоњ б≥бл≥отечноњ системи, проте вони Ї морально застар≥лими ≥ не забезпечують ефективну роботу з цими даними.÷≥л≥сн≥сть ≥ правильн≥сть колективне користуванн€ дос€гаЇтьс€ при орган≥зац≥њ ≥нформац≥йного фонду у вигл€д≥ банк≥в даних(ЅЌƒ),шо складаютьс€ з бази даних (Ѕƒ) ≤ системи управл≥нн€ Ѕƒ.Ѕƒ-це сукупн≥сть взаЇмоповТ€заних баз даних, €к≥ використовуютьс€ б≥льш н≥ж одним користувачем або компонентами —јѕ–.—”Ѕƒ-це програмна система,€ка забезпечуЇ застосуванн€:введенн€ баз даних.
¬имоги до Ѕƒ ≥ —”Ѕƒ
Ќайб≥льш важлив≥ Ї повнота ≥ достов≥рн≥сть даних, €к≥ характеризують ц≥л≥сн≥сть даних. р≥м цих двох п-≥в до Ѕƒ висуваЇтьс€ вимоги до м≥н≥м≥зац≥њ часу даних ≥ обробки даних ≥ ступ≥нь захисту.
ласиф≥кац≥€ банк≥в ≥ баз даних;Ѕƒ-Ѕƒ+—”Ѕƒ.ƒо основних ознак класиф≥кац≥й:
1. ступ≥нь ун≥версальност≥(ун≥версальн≥,спец≥ал≥зован≥)-—”Ѕƒ
2.Ѕƒ:проектнозалежн≥,проектнонезалежн≥
”н≥версальн≥ можна використовувати в р≥зних програмах, вимагають ≥дентичност≥ —ƒ €к≥ мають р≥зну проблемну ор≥Їнтац≥ю.
—пец≥ал≥зован≥ -—”Ѕƒ дл€ окремих напр€мк≥в(економ≥ка-1-S)
ѕроектнозалежн≥ Ѕƒ-м≥ст€ть ≥нфо про проекти що в≥дбуваютьс€,≥ ц€ ≥нформац≥€ часто зм≥нюЇтьс€.
|
|
|
ѕроектнонезалежн≥ Ѕƒ-(арх≥ви)-≥нфо зм≥нюЇтьс€ дуже р≥дко.
2. «а масштабами застосуванн€:≥нтегрован≥ (загальн≥),локальн≥ ≥ окремих пакет≥в прикладних програм(ѕѕѕ).
≤Ќ“≈√–ќ¬јЌ≤ Ѕƒ дл€ вс≥Їњ —јѕ–:загальн≥-ц≥ла система —јѕ–,Ћќ јЋ№Ќ≤-одна з п≥дсистем —јѕ–.
3. «а м≥сцем розташуванн€ Ѕƒ:централ≥зован≥,розпод≥лен≥.
÷ентрал≥зован≥-т≥ €к≥ розташовуютьс€ в одному компТютер≥(в центрально обчислювальному корпус≥,сервер≥)
–озпод≥лен≥-розташован≥ на кожному компТютер≥(залежить в≥д частоти звертань)
4.«а типом структурованост≥: сильно структурован≥ (фактограф≥чн≥),у €ких ч≥тк ф≥ксован≥ к≥льк≥сть ≥ формати пол≥в. слабоструктурован≥ (документальн≥)реченн€ звичайноњ мови,де к≥льк≥сть пол≥в майже не обмежуЇтьс€(нотатки, прим≥тки, в ≥нформац≥йно пошукових системах)
5. «а типом прийн€тноњ модел≥ даних.ћодель даних.ѕредставленн€ про предметну область у вигл€д≥ структури даних-означенн€ даних:≥Їрарх≥чна(дерево)-дана модель даних волод≥Ї тим, що забезпечуЇ найб≥льш швидкий доступ доних про те вона надзвичайно незручна дл€ користувача.
- мережева -под≥бна до ≥Їрарх≥чноњ, зам≥сть дерева, графи р≥зних форм,займаЇ середн≥ позиц≥њ по швидкод≥њ ≥ зручност≥ роботи з даними.
- рел€ц≥йна модель даних представл€Їтьс€ у вигл€д≥ таблиць та звТ€зк≥в м≥ж ними. Ќайб≥льш зручна у користуванн≥, за допомогою €коњ створюють, запити зв≥ти, корегуванн€ даних тощо.
–ел€ц≥йний п≥дх≥д.
—укупн≥сть модел≥в даних ≥ в≥дпов≥дн≥ операц≥њ по робот≥ з даними називають п≥дходом,символ≥чне представленн€ в≥дношень,сукупн≥сть таблиць.
—хема в≥дношенн€- записуЇтьс€ у вигл€д≥ Q(A1,A2,ЕAn)
Q-≥м€ в≥дношенн€,ј≥-атребут.–озгл€немо приклади таких в≥дношень:
R1(Ўƒ,≤ƒ,маса,√ќ—“,матер≥ал)
R2(Ў¬,≤¬,маса,застосуванн€)
R3(Ў¬,Ўƒ,к≥льк≥сть деталей).
”рел€ц≥йному п≥дход≥ операц≥њ це д≥њ над в≥дношенн€ми, вибираЇтьс€ за запитами користувач≥в на мов≥ ман≥пулюванн€ даними SQL.
ѕриклад.¬обчисленн≥ в≥дношень можуть використовуватись оператори в наступн≥й форм≥ –,Q(S):L-«јћ≤Ќ»“»,створити,видалити,знайти. Q-назва в≥дношенн€, S-перел≥к атрибут≥в, L-предикат,виражаЇ умови €ким повинн≥ задовольн€ти дан≥ у в≥дношенн≥.ѕриклад:необх≥дно знайти детал≥ ≥ створити њх перел≥к, маса б≥льше 100г.—творити R4(R,Ўƒ): R1.маса б≥льше 100г.

