




ЗМІСТ
ВСТУП.............................................................................................................4
ЛАБОРАТОРНА РОБОТА № 1 Ідентифікація об’єктів управління в
часовому просторі.........................................................................................6
ЛАБОРАТОРНА РОБОТА № 2 Ідентифікація об’єктів управління в
частотному просторі...................................................................................17
ЛАБОРАТОРНА РОБОТА № 3 Ідентифікація об’єктів управління по двох точках частотної характеристики.....................................................24
ЛАБОРАТОРНА РОБОТА № 4 Ідентифікація об’єктів управління в складі замкнутих систем..............................................................................31
перелік посилань................................................................................42
ВСТУП
В практиці автоматизації технологічних процесів, приходиться розв’язувати завдання дослідження динаміки об’єктів автоматизації, на основі математичного опису об’єктів вибирати закони функціонування регуляторів, досліджувати якість перехідних процесів замкнутих систем.
Подібні дослідження можна проводити на діючих об’єктах. Як показує практика подібних досліджень, вони потребують великих матеріальних і часових затрат, а в більшості випадків проведення подібних досліджень взагалі неможливе. Пов’язано це з тим, що часто необхідно дослідження проводити в критичних режимах, які недопустимі для технологічного обладнання. Крім того, якщо річ йде про розробку і проектування нових об’єктів і систем управління ними то об’єкт досліджень взагалі ще не існує.
На практиці проведення таких досліджень широке використання отримали дослідження з використанням моделей.
Розрізняють три основні види моделей:
– фізичні;
– алгоритмічні;
– математичні.
Найбільш зручними з точки зору дослідження статичних і динамічних характеристик в практиці розробки автоматичних систем управління є математичні моделі.
Математичні моделі можуть бути записаними як у вигляді алгебраїчних рівнянь, систем алгебраїчних рівнянь, у вигляді диференційних
рівнянь, систем диференційних рівнянь, у вигляді передаточних функцій.
Оскільки технологічні об’єкти є достатньо складними, то в своїй більшості вони як правило, описуються диференційними рівняннями, системами диференційних рівнянь, а в практиці автоматизації технологічних процесів використовуються передаточні функції, які в свою чергу є не що інше як операторна форма запису диференційних рівнянь.
Маючи передаточну функцію об’єкта або систему диференційних рівнянь якою описується об’єкт можна побудувати частотні, статичні і динамічні статичні характеристики. Для побудови статичних характеристик необхідно систему рівнянь якою описується об’єкт розв’язати відносно вхідної дії, а для отримання динамічних характеристик необхідно ту ж систему розв’язати в часовому просторі при відповідній формі вхідної дії і відповідних початкових умовах.
Тому завдання отримання математичних моделей актуальне для вирішення проблем автоматизації. Оскільки теплоенергетичні об’єкти є складними об’єктами і в більшості випадків не піддаються аналітичному опису, то на практиці ідентифікації таких об’єктів використовують різноманітні експериментальні методи.
ЛАБОРАТОРНА РОБОТА 1
ІДЕНТИФІКАЦІЯ ОБ’ЄКТІВ УПРАВЛІННЯ В ЧАСОВОМУ ПРОСТОРІ
Ціль роботи: Вивчення методики ідентифікації об’єктів управління в часовому просторі.
Одним з найпростіших методів ідентифікації (отримання точної математичної моделі) є ідентифікація технологічних об’єктів в часовому просторі. Оскільки технологічні об’єкти є достатньо складні і у більшості своїй не піддаються аналітичному опису то для отримання опису таких об’єктів в вигляді диференційних або систем диференційних рівнянь на практиці часто використовують експериментальні перехідні функції об’єктів.
Перехідна функція – це реакція об’єкта або системи управління на одиничну ступінчату дію. Перехідна функція може бути отримана як експериментальним шляхом так і шляхом розв’язання диференційного рівняння при Х=1 і нульових початкових умовах. Виходячи з цього - перехідна функція є не чим іншим як точним розв’язком того рівняння яким описується об’єкт і вигляд якого необхідно отримати. Таким чином завдання ідентифікації в цьому випадку полягає в розв’язанні зворотного завдання динаміки. Тобто по відомому розв’язку необхідно отримати саме диференційне рівняння.
Наприклад, експериментальна перехідна функція об’єкта має вигляд наведений на рисунку 1.

Рисунок 1 – Перехідна функція об’єкта управління
Як видно із наведеного рисунка перехідна функція має вигляд перехідної функції аперіодичної ланки n–го порядку. На початковому відрізку часу вихідний сигнал практично не міняє своєї величини по амплітуді, тобто відстає або запізнюється відносно вхідного сигналу. Тому в якості передавальної функції моделі об′єкта можна вибрати передавальну функцію наступного вигляду:
 , (1)
, (1)
де К – коефіцієнт підсилення об’єкта, Т – постійна часу, τ – величина запізнення, n – порядок об’єкта.
Для визначення початкової величини коефіцієнтів К,Т, n, τ можна скористатися методикою представленою в [1 ]. Приклад визначення коефіцієнтів при n = 2 наведено на рис. 1.
Якщо математична модель точно описує об’єкт, то перехідна функція моделі повинна точно відтворювати перехідну функцію об’єкта отриману експериментальним шляхом на протязі всього часового діапазону. Для перевірки адекватності моделі та об’єкта необхідно описати модель системою диференційних рівнянь і розв’язати отриману систему у часовому просторі при Х = 1. Для зручності структуру моделі об’єкта можна представити в наступному вигляді.
Рисунок 2 – Розрахункова схема
Оскільки: 
 ;
; 
 ;
;
 .
.
То можна записати наступні вирази:
 (2)
(2)
Таким чином отримана система диференційних рівнянь в операторній формі. Якщо в системі рівнянь (2) провести заміну Р на d/dt то систему рівнянь можна записати в звичайній формі:
Y1′ = (KX - Y1)/T
Y2 ′ = (Y1 - Y2)/T (3)
Y3′ =2 (Y2 - Y3)/τ
Y4′ =2 (Y3 - Y4)/τ
Далі шляхом розв’язання системи диференційних рівнянь в часовому просторі будується перехідна функція моделі і проводиться аналіз її ідентичності з перехідною функцією об’єкта управління, що отримана експериментальним шляхом. Якщо ці перехідні функції збігаються з необхідною точністю на протязі всього часового простору то процес ідентифікації рахується закінченим. В противному випадку коригується величина коефіцієнтів К,Т, n, τ в ту чи іншу сторону і процедура повторюється.
Таким чином процес ідентифікації можна умовно розбити на чотири основних етапи:
1. Експериментальне визначення перехідної функції об’єкта управління.
2. Вибір структури моделі.
3. Визначення числових значень коефіцієнтів, що входять в вибрану структуру моделі.
4. Перевірка адекватності моделі і об’єкта управління.
Процедуру ідентифікації можна спрощено представити в вигляді блок-схеми.

Рисунок 3 – Блок – схема процедури ідентифікації
В тих випадках, коли шляхом зміни величини коефіцієнтів К,Т, n, τ не вдається отримати позитивних результатів, необхідно змінити структуру математичної моделі.
Завдання на лабораторну роботу
1. Вивчити методику ідентифікації.
2.В залежності від номера варіанту із завдання вибрати перехідну функцію об’єкта.
3. Вибрати структуру моделі.
4. Визначити величину коефіцієнтів моделі.
5. Перевірити адекватність моделі і об’єкта.
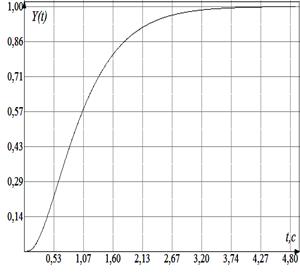

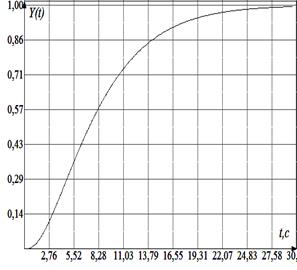

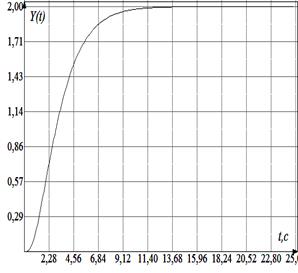



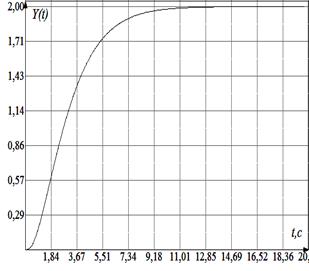
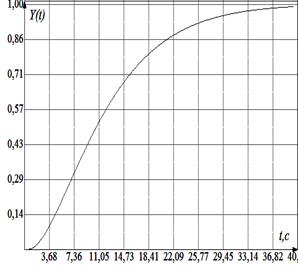

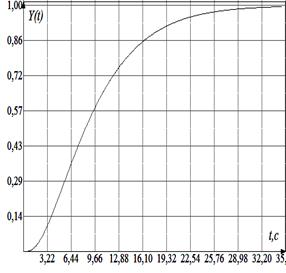
Рисунок 4 – Завдання на лабораторну роботу
ЛАБОРАТОРНА РОБОТА 2

