




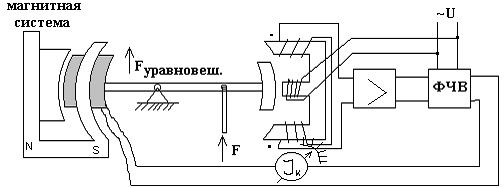
F – измеряемая сила действует на рычаг, который перемещается. Перемещение рычага измеряется дифференциальным трансформаторным датчиком. Вместо упругого преобразователя используется магнитная система. Переменный сигнал с выхода ФЧВ выпрямляется и подается в обмотку магнитной системы, которая оказывает усилие Fуравн. на рычаг.
Пусть F – увеличилась, что вызывает перемещение ферромагнитного сердечника датчика. При этом увеличивается переменное напряжение (сигнал) с выхода дифференциального трансформаторного датчика, которое выпрямляется и увеличивает ток в катушке магнитной системы, т.е. каждому значению силы F соответствует определенное значение тока магнитного преобразователя. Данный датчик, имея ООС, реализует статическое регулирование. Здесь есть статическая ошибка, которая тем больше, чем меньше коэффициент усиления системы.
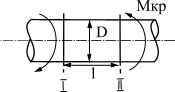
Показания прибора пропорциональны величине линейного момента.
Измерение крутящих моментов
Датчики, использующие закручивание упругого вала, называют торсиометрами.

Е – модуль упругости
 - длина сечения
- длина сечения
D – диаметр вала
Мкр – момент крутящий
1) Для измерения угла поворота сечений  могут использоваться любые датчики, например – емкостный датчик:
могут использоваться любые датчики, например – емкостный датчик:
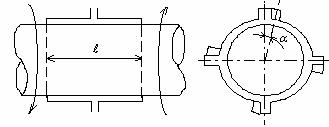
Емкость образуется пластинами. При закручивании изменяется площадь перекрытия SX = Scosα пластины, а следовательно изменяется емкость. Если вал вращается, то нужны контактные кольца, щетки.
2) Бесконтактный оптический датчик:

Если М=0, то вырезы одного диска не совпадают с вырезами другого. При увеличении крутящего момента сечения закручиваются, при этом площадь перекрытия отверстий увеличивается, увеличивая фототок датчика.

