




Цель работы.
Убедиться в возможности управления процессом преобразования электрической энергии с помощью простейших регуляторов.
Убедиться в подтверждении законов Ома, Кирхгофа и Джоуля-Ленца.
Теоретическая часть.
Все электротехнические устройства, в которых протекает процесс превращения электрической энергии в какую-либо другую (тепловую, механическую, химическую и т.д.) называются приемниками электрической энергии. Но чаще термин «приемник электрической энергии», или просто «приемник», употребляется в более узком смысле, а именно приемником называются только те устройства, которые превращают электроэнергию с полезной целью.
В производственной практике часто возникает необходимость управления процессом превращения электроэнергии в приемнике. Например, при работе троллейбуса есть необходимость пуска, регулирования скорости, торможения тягового двигателя, который является приемником электроэнергии. В связи с этим в настоящее время применяется большое количество различных регуляторов. Все они имеют те или иные преимущества, но не лишены недостатков. Одним из основных недостатков регуляторов является потребление ими электрической энергии. Регулятор нагревается и КПД установки (приемник-регулятор) в целом уменьшается.
Как известно, КПД
 (1.1)
(1.1)
Или
 , (1.2)
, (1.2)
где Р2 – мощность приемника, Вт;
ΔР – мощность потерь, которая в случае установки, состоящей из приемника и регулятора, является в основном, мощностью регулятора, Вт;
Р1 = Р2 + ΔР – потребляемая мощность Вт.
Поэтому чем меньше энергии расходуется на нагрев регулятора, тем выше КПД установки.
Другими показателями регулятора являются: глубина регулирования, мощность регулирования, однозначность регулирования, плавность регулирования, удобство и т.д.
Глубину регулирования можно оценивать в процентах.
Глубина регулирования по напряжению
 (1.3)
(1.3)
Глубина регулирования по току
 , (1.4)
, (1.4)
гдеU2 и I2 – напряжение и ток приемника.
О линейности регулятора судят по соотношению
 или
или  , (1.5)
, (1.5)
где: ΔU2 и ΔI2 – приращения напряжения и тока приемника;
– приращение воздействия.
Регулятор будет линейным, если
 или
или  (1.6)
(1.6)
при любых значениях ΔZ. В противном случае регулятор нелинейный.
Воздействием Zу различных регуляторов могут быть: напряжение, ток, врем, линейное или угловое перемещение, или какой-либо другой фактор.
В работе исследуются два способа регулирования напряжения и тока (мощности):
а) изменением дополнительно регулируемого сопротивления, включенного последовательно с приемником (рис.1.1а);
б) изменением сопротивления, включенного параллельно-последовательно относительно приемника (рис.1.1б)
Способ а) специального названия не имеет, в данной работе он для краткости условно называется реостатным способом. Способ б) называют делителем напряжения. Регулирование этими способами тока и напряжении осуществляется путем перемещения движка на реостате, используемого в качестве регулятора. Роль воздействия Z здесь играет положение движка.
На рис.1.1. приняты следующие обозначения:
I – ток, протекающий в последовательной цепи регулятор-нагрузка при реостатном способе регулирования, А;
U1 – напряжение сети, В;
U2 – напряжение на сопротивлении RН нагрузки, В;
ΔU – падение напряжения на реостате RP регуляторе при реостатном способе регулирования, В;
I1 – ток во входной цепи регулятора при регулировании с помощью делителя напряжения, А;
I2 – ток, протекающий по сопротивлению нагрузки, А;
ΔI – ток, протекающий только в цепи регулятора, представляет собой разность между I1 и I2 A.
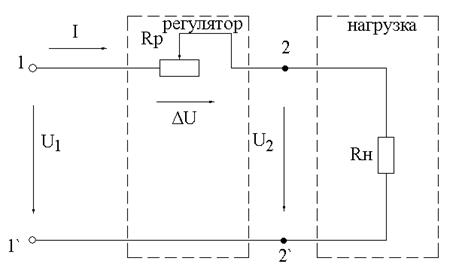
Рис.1.1. Схема включения регулятора.
а) реостатный способ

б)
Рис.1.1. Схема включения регулятора:
б) способ делителя напряжения.

