




Кинетостатический анализ проводится без учёта упругих свойств звеньев и, как правило, приводит к результатам, не в полной мере соответствующим наблюдаемым в действительности. Поэтому практический интерес представляет изучение влияния упругих свойств отдельных элементов и всей системы гонщик-велосипед на её динамические характеристики. Из всего многообразия возможных динамических моделей рассмотрим модель его звеньев. При этом ограничимся только изучением влияния крутильных и изгибных деформаций, а также деформаций растяжения элементов привода.
Для такой динамической модели введём обозначения: J0, K01 – момент инерции периферийной части однотрубки, соприкасающейся с дорожным покрытием, и её приведённая крутильная жёсткость; J1, k12 – суммарный момент инерции однотрубки, обода и спицевого набора и их приведённая крутильная жёсткость; J2 – момент инерции втулки колеса и системы ведомых звёздочек; k23 – крутильная жёсткость цепной передачи; J3 – момент инерции системы ведущих звёздочек, кривошипов, педалей и части нижних конечностей гонщика; Mд – движущий момент; ф0, ф1, ф2, ф3 – угловые координаты вращения элементов модели вокруг своих осей.
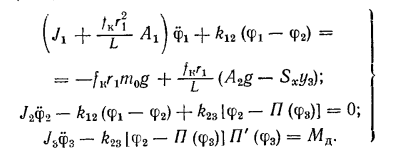
На основании уравнения (?! Омг) Лагранжа второго рода, кинетической и потенциальной энергий рассматриваемой системы получены уравнения движения:

Величины F0=F1 и r0=r1 соответствуют величинам, найденным при кинетостатических исследованиях. Учитывая это, а также пренебрегая величиной J0 вследствие её малости, вышеприведённую систему можно упростить:

Рассматривая упрощённый вариант движения велосипеда по горизонтальному участку (“a”=0) и случай одинаковых колёс (Y=0), а также полагая, что Sy=0, найдём

Где

В предыдущем равенстве x1=r1ф1 и, следовательно, уже упрощённая система уравнений запишется в виде
Обозначим закон угловых перемещений кривошипа через ф3(t), тогда получим

Где q3(t) – малые отклонения колебательного типа. Используя это уравнение, произведём линеаризацию функции положения цепной передачи П (ф3) и её производной П’ (ф3)

Функции ф1(t) и ф2(t) также представили как сумму их координат ф1’(t) и ф2’(t) и соответствующих отклонений q1(t) и q2(t):

В первом приближении силу сопротивления набегающего воздушного потока Sx можно считать постоянной и соответствующей средней скорости движения x’ср=ф3ir, где I – П’ (ф3) – передаточное отношение цепного привода. Тогда правая часть первого уравнения системы тоже будет постоянной и равной А3:

Движущий момент Мд будем считать функцией частоты вращения кривошипа p3

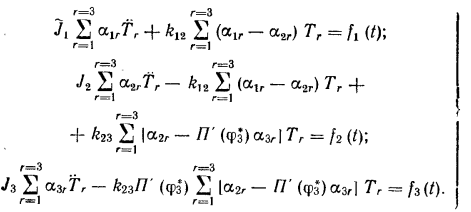
В результате система уравнений преобразуется к виду

Где

Кроме того, в системе уравнений опущены слагаемые второго порядка малости относительно величин q2 и q3.
Решение системы линейных, неоднородных, с переменными коэффициентами уравнений найдём с помощью метода разложения по формам собственных колебаний, для чего рассмотрим систему с нулевыми правыми частями и определим переменные собственные частоты w2 и нестационарные коэффициенты форм колебаний “a”jr (j =1, 2, 3). Решение однородной системы соответствующее частоте Wr, будем искать в виде

Где т – параметр, соответствующий времени, причём Фr(т)=Wr(т)
При этих условиях из уравнения вида решения однородной системы можно получить

Для существования отличных от нуля значений “a”jr необходимо выполнить равенство

Раскрыв частотный определитель, получим алгебраическое уравнение третьей степени относительно Wr2(t), из которого могут быть найдены три группы значений собственных частот: W1(t), W2(t) и W3(t), причём W1(t)=0. Отметим, что при П’(ф3)=const=I из системы уравнений, приведённой выше определяются три действительных значения собственных частот W1, W2, W3.
Для нахождения коэффициентов форм собственных колебаний положим a1r=1 и решим следующую систему

Преобразую систему уравнений найдём

Из системы уравнений видно, что коэффициенты форм собственных колебаний “a”jr переменны, так как они зависят от значений П’(ф3) и W1(t).
В этом случае решение системы уравнений будем искать в виде

После соответствующих подстановок найдём:
Из условия ортогональности форм собственных колебаний следует, что при S, не равной r, где s, r – номера форм колебаний, получим

На основании уравнений с учётом формулы выше имеем

Где f1(t), f2(t), f3(t) – правые части системы уравнений.
Рассмотрим реализацию уравнения на основе приближенных методов решения. Если выполняется условие

То удобно воспользоваться приближенным методом, в соответствии с которым частные решения уравнения

Записываются в виде:

Общее решение однородного уравнения представляется в следующей форме:

На основе частных решений общее решение неоднородного уравнения может быть простроено посредством метода вариации производных и постоянных:

Где

Определив функцию Tr и воспользовавшись всеми найденными ранее соотношениями, найдём:

Три последних уравнения определяют перемещения, скорость и ускорения системы гонщик-велосипед в поступательном движении.
Анализ рассмотренной динамической модели показывает, что данная задача достаточно сложна и не допускает решения в конечном общем виде. Поэтому для исследования кинематики динамической модели необходимо ввести в уравнения движения конкретные значения всех параметров в виде функций 
Рассмотрим динамическую задачу в несколько упрощённой постановке, считая, что П’(ф3)=i=const. Предварительно установим закон изменения ф3(t), лоя чего приведём все моменты инерции и внешние силы к оси ведущей звёздочки:

Тогда уравнение движения ведущей звёздочки запишется в виде

Для того, чтобы движение системы было установившимся, необходимо выполнение равенства М0+Ai=0. В противном случае будут происходить или ускорение системы (при M0+Ai>0), или её торможение (при M0+Ai<0). В итоге получим нелинейное дифференциальное уравнение

Для решения уравнения примем ф3=p3t+дельта(ф3), где p3 – средняя частота вращения кривошипа; дельта(ф3) – малые периодические отклонения угловых перемещений ф3 в функции p3t. С учётом принятых допущений получим

После соответствующих подстановок получим

Так как значение дельта(ф3) определялось из кинетостатических представлений, то следует сделать вывод, что даже без учёта упругих свойств привода возможны колебания кинематических характеристик с высшими гармониками.
Обозначим коэффициенты уравнения через А1 и В1. При постоянных параметрах системы Wr(t)=Wr(0) частные решения представляются в виде yr1=sin(Wrt) и yr2=cos(Wrt). С учётом постоянства П’(ф3) зависимости f1(t), f2(t) и f(t) будут иметь вид

При полученных выражениях для возмущающих факторов интегралы, входящие в ранее приведённое уравнение, могут быть найдены в конечном виде и функции времени опишутся следующим уравнением”

Где

Поскольку входящие в предыдущее уравнение величины известны, задачу определения параметров движения системы гонщик-велосипед с учётом упругих свойств привода можно считать решённой. Из уравнения видно, что колебательный процесс имеет составляющие с собственными частотам Wr и три гармоники от внешнего возмущения со средней частотой p3. Для устойчивой работы необходимо обеспечить выполнение условия, определяющего возможные значения низшей собственной частоты колебаний W1, т.е. W1>>3p3.
Необходимо отметить, что основным фактором, влияющим на амплитудные значения функции Tr, а следовательно, и на интенсивность колебательных процессов, является величина дельта(M) переменной части движущего момента. Так, при дельта(М)=0 величины R,S и М равны нулю и колебания с частотой p3 или с частотами, кратными ей, отсутствуют. Остаются только колебания с собственной частотой, которые могут возбуждаться только случайными причинами, но, как известно, эти колебания достаточно быстро затухают, и при установившемся движении их можно не учитывать.
При проектировании и сравнительной оценке конструкции гоночных велосипедов и их приводных систем важнейшими характеристиками являются частотный спектр и чувствительность собственных частот к изменению параметров отдельных элементов системы, в частности приводной передачи. Проанализируем степень влияния жёсткостей k12 (крутильной жёсткости цепного привода) на значения собственных частот W2 и W3 при W1=0.
Исходные значения параметров, необходимых для расчёта, были определены экспериментально на стандартном цепном приводе. Так, жёсткостные характеристики цепного привода были определены согласно схеме ниже

Для этого ведомую звёздочку 1 жёстко фиксировали в специальном приспособлении. Цепь 2 имела возможность свободного провисания (положение ‘2) в меру общего натяжения цепи при настройке системы привода. Ведущее колесо 3 при положении к педали 4 усилия Q разворачивалось по часовой стрелке. Приведённая деформация x фиксировалась индикатором 5. В проведённом эксперименте приведённая жёсткость k23 складывалась из продольной жёсткости цепи, жёсткости провисающей цепи на участке AB, изгибной и крутильной жёсткости кривошипа и изгибной жёсткости оси педали.
Номинальные значения экспериментально определённых жёсткостей: k12=1770 Н/м; k23=202 Н/м. Изменение каждой из жёсткостей рассматривалось в диапазоне 0,1kij<=kij<=10kij, где через kij обозначены их номинальные значения. Моменты инерции элементов рассчитываемой модели были приняты: J1=0,72кг*м2 =z1/z2=48/14=3.43

На рисунке выше показаны рассчитанные зависимости W2 и W3 от k12. Как видно, изменение жёсткости k12 от 177 до 17700 Н/м вызывает увеличение собственной частоты W2 только в начале диапазона, а затем, начиная асимптотически стремиться к значению W2=200с-1. Это свидетельствует о том, что существующие значения жёсткости k12 достаточны и, например, применение более жёстких по параметрам крутильной жёсткости дисковых колёс не увеличивает значение собственной частоты W2. В то же время очевидно сильное влияние величины k12 на значение высшей собственной частоты W3. Последняя, однако, мало влияет на динамическую характеристику привода велосипеда.
На второй части рисунка дана аналогичная зависимость частот W2 и W3 от жёсткости k23, изменяющейся в диапазоне 20-2020 Н/м. Из графиков видно, что значения собственной частоты W2 более чувствительны к изменению жёсткости k23, чем значения W3. Вместе с тем изменение жёсткости k23 вблизи её номинальных значений не позволяет существенно изменить низшую собственную частоту.
В связи с изложенным при необходимости увеличения низшей собственной частоты W2 целесообразно одновременно увеличение жёсткостей k12 и k23. Так, при увеличении каждой из них в 1.5 раза по сравнению с номинальными значениями собственные частоты становятся равными w2=230c-1; W3=660c-1.
Использовалась литература:
Любовицкий В.П. – «Гоночные Велосипеды».

