




В данной лабораторной работе вам предлагается самим разработать базовые правила для нечеткого регулятора типа Такаги-Сугено для вашего варианта задания, играющего роль нечеткого супервизора.
1. Откройте приложение Simulink программы MATLAB7.X. Далее соберите схему, показанную на рис. 13 и соответствующую точно линеаризованной системе на рис.10, и установите значения параметров линейной части ОУ в соответствии с номером задания (варианты заданий приведены в приложении). Представленные на рис.13 блоки находятся соответственно в разделах библиотеки Simulink: Step, Sum, Gain, Scop e, Integrator, Mux – Commonly Used Bloks, Transfer Fcn – Continuous, To Workspace – Sinks, Clock – Sources.

Рис. 13
Найдите значение коэффициента a, при котором перерегулирование точно линеаризованной системы при v(t)=1(t) совпадает со значением, указанным в вашем варианте задания.
- Соберите схему моделирования, показанную на рис. 14.
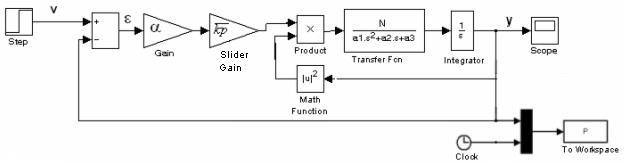
Рис.14
Представленные на ней блоки Math Function и Slider Gain находятся в разделе Math Operations. Установите начальное значение интегратора 0,1.
При  =1 и значении a, полученном в п.1, найдите перерегулирование
=1 и значении a, полученном в п.1, найдите перерегулирование  для v(t)=1(t).
для v(t)=1(t).
Для каждой требуемой рабочей точки y=yj, другими словами, для каждого задающего воздействия v(t)=yj1(t), где yj принимает значения 0,5; 1; 1.5; 2; 4, найдите путем симуляции модели значение коэффициента  j, при котором величина перерегулирования оказывается близкой к величине . Полученные данные занесите в таблицу 3.
j, при котором величина перерегулирования оказывается близкой к величине . Полученные данные занесите в таблицу 3.
Табл. 3
| y | 0,5 | 1,5 | |||

| 
| 
| 
| 
| 
|
3. Реализуйте супервизор, соответствующий таблице 3, с помощью таблицы задания.
3.1. С этой целью соберите схему, представленную на рис. 15, где блок Lookup Table (таблица задания) взят из раздела Lookup Tables.
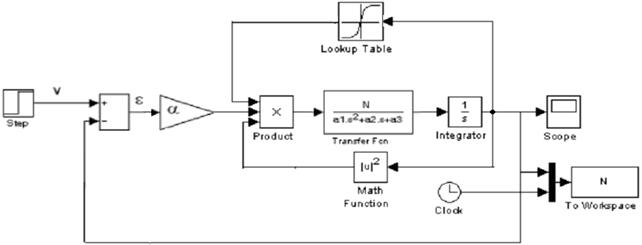
Рис.15
Затем щелкните мышью над блоком Lookup Table и в появляющееся окно внесите изменения в соответствии с рис. 16.
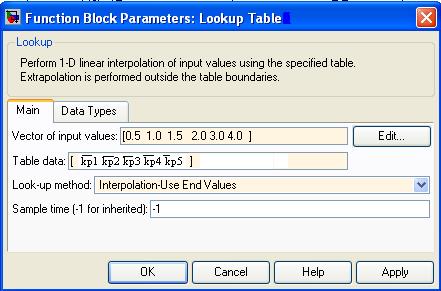
Рис.16
3.2. Убедитесь в том, что сконструированная таблица задания правильно аппроксимирует точки, соответствующие таблице 3. Для этого щелкните мышью над кнопкой Edit в окне на рис. 16 и в появляющемся окне Look Table Editor…(рис. 17) в меню Plot выберите команду Linear. После выполнения этой команды вы должны получить окно, подобное окну на рис. 18
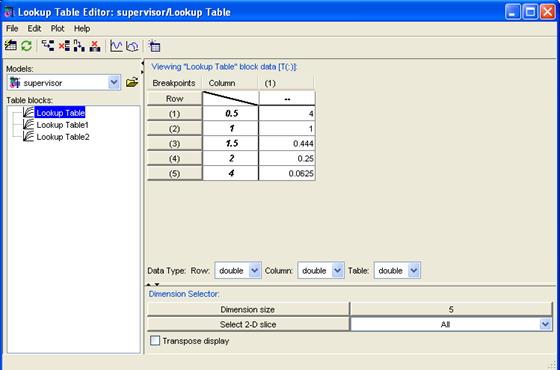
Рис. 17
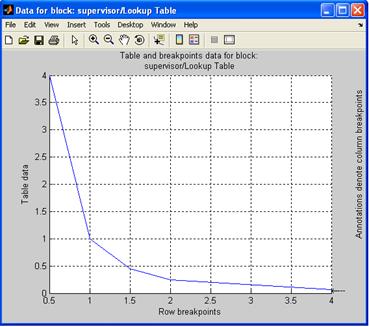
Рис. 18
3.3. Найдите перерегулирование системы управления с полученным супервизором в виде таблицы задания, подавая на вход сигнал v(t)=yj1(t), где yj принимает значения 0,5; 1.5; 2; 3; 4.
4. Реализуйте супервизор, соответствующий таблице 3, с помощью нечеткого контроллера типа Такаги-Сугено.
4.1.Для этого в командной строке MATLAB пропишите команду fuzzy. Перед вами
появится окно, представленное на рис. 19.

Рис. 19.
В пункте меню File выберите вкладку New FIS…, а затем тип контроллера Sugeno.
Дайте название файлу FIS, например, TS. Для этого экспортируйте файл в Workspace с помощью File/ Export/To Workspace … с выбранным именем. Затем обозначьте вход как y, а выход как kp.
Теперь необходимо произвести задание функций принадлежности. Для этого щелкните два раза по левому полю y.Далее постройте треугольныефункции принадлежности для y (рис. 21). Каждая вершина треугольника соответствует заданным вам значениям выхода системы yj. Для добавления к трем функциям по умолчанию дополнительных функций принадлежности используйте вкладку меню Edit -> Add MFs. В появившемся окне (рис. 20) введите в строку Number of MFs интересующее вас количество дополнительных вершин.

Рис. 20.
У вас должен получиться график, аналогичный представленному на рис. 21.

Рис. 21.
Теперь перейдите в правый блок kp. В появляющемся окне для переменных mf1, mf2, mf3 … задайте в строке Params значения найденных вами в п. 2.2 коэффициентов j. Окно для ввода коэффициентов показано на рис.22.

Рис. 22.
4.2. Спроектируйте базовые правила для нечеткого супервизора типа Такаги-Сугено. Для этого необходимо выбрать пункт Rules меню Edit. В появляющееся окно с помощью клавиши Add Rule введите базовые правила (рис. 23)..
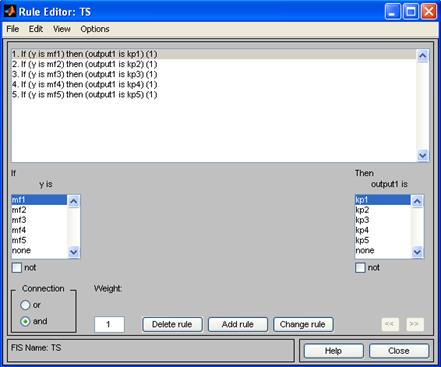
Рис. 23.
Теперь вы можете увидеть, каким образом формируются степени истинности правил и выходная величина нечеткого супервизора , а также кривую, характеризующую нелинейный закон изменения в зависимости от y. Для первого действия необходимо в окне правил (рис. 23) в меню View выбрать пункт Rules, для второго – в том же меню View пункт Surface. Вы должны получить два окна, представленных на рис.24 и рис.25.

Рис. 24.

Рис. 25.
Сохраните спроектированный супервизор в рабочую область MATLAB под именем TS, используя последовательно команды File -> Export -> To Workspace…
4.3. Теперь необходимо проверить удовлетворяет ли построенный вами контроллер заданным требованиям - обеспечивает ли он качественную работу системы автоматического управления.
Для этого необходимо собрать схему, представленную на рис. 26.
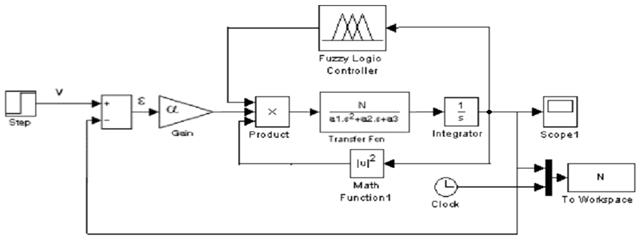
Рис. 27.
Входящий в нее блок Fuzzy Logic Controller находится в разделе Fuzzy Logic Toolbox библиотеки Simulink
В этот блок Fuzzy Logic Controller необходимо ввести имя файла, в котором содержится информация о спроектированном вами контроллере (этот файл вы сохранили в рабочей области MATLAB в п. 4.2).
4.4. Найдите перерегулирование системы управления с полученным нечетким супервизором, подавая на вход сигнал v(t)=yj1(t), где yj принимает значения 0,5; 1.5; 2; 3; 4, и запуская модель.
После запуска модели вы должны получить на Scope графики, отвечающие заданным требованиям.
5. Сравните качество системы с нечетким супервизором и системы с пропорциональным регулятором. Для этого соберите схему, показанную на рис. 28, и найдите реакции систем на вход v(t)=yj1(t), где yj принимает значения 0,5; 1; 1.5; 2; 4.

Рис. 28.
Сравните полученные графики. Сделайте выводы. Все схемы и результаты моделирования сохраните в отчет.
Содержание отчёта.
Отчёт должен содержать следующие данные:
1. Структурные схемы модели замкнутых систем для всех спроектированных супервизоров. Функции принадлежности и поверхность управления для нечеткого супервизора.
2. График зависимости, связывающий выход и вход супервизора, реализуемого с помощью таблицы задания.
3. Графики, изображающие реакции замкнутых систем, полученные в пп. 1., 2, 3, 4, 5.
4. Таблицу, используемую для построения супервизора.
Контрольные вопросы:
1. Каким образом осуществляется плановое изменение коэффициента усиления?
2. Объясните суть работы контроллера Такаги-Сугено.
3. Каким образом компенсируется нелинейность ОУ в нечетких супервизорах?
4. Объясните, почему для вычисления коэффициентов kp мы пользовались формулой (8).
.

