




В данной лабораторной работе исследуется САУ, где ОУ имеет сильно нелинейные свойства. Управление осуществляется с помощью пропорционального регулятора и нечеткого супервизора.
При этом объект управления с существенно нелинейными свойствами [ коэффициент
f(y) =  при управляющем воздействии
при управляющем воздействии  зависит от управляемой величины
зависит от управляемой величины  ], описывается уравнением:
], описывается уравнением:
 . (5)
. (5)
Структуру данного объекта можно представить как линейную часть с передаточной функцией
 , (6)
, (6)
охваченную квадратичной обратной связью (рис. 6).
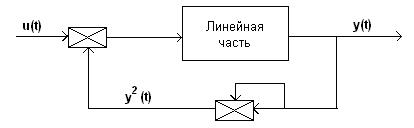
Рис. 6.
Цель управления: найти закон управления, который обеспечивал бы качественную работу системы автоматического управления при изменении рабочей точки (состоянии равновесия), т.е. значений y = const, для широкого диапазона рабочих точек (0<y<4). Обязательным является выполнение условия  .
.
Рассмотрим модель системы, в которой управление осуществляется с помощью пропорционального регулятора. Эту систему можно реализовать с помощью инструментального средства Simulink, как показано на рис. 7. Учтем, что на систему может действовать действует некоторое возмущающее воздействие g(t), которое на схеме представлено в виде блока Disturbance.
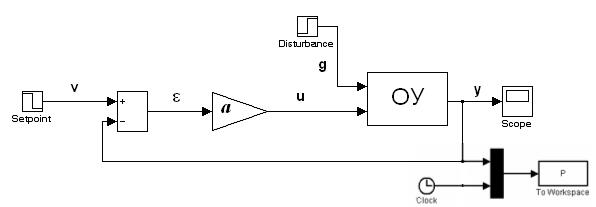
Рис. 7.
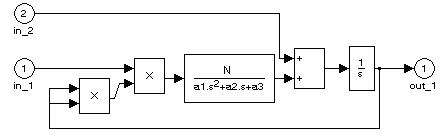
Внутренняя структура ОУ, включая линейную и нелинейную часть, может быть раскрыта с помощью рис. 8. С входа in_1 подается входное воздействие  , а с входа in_2 возмущающее воздействие g(t).
, а с входа in_2 возмущающее воздействие g(t).
 .
.
Рис. 8.
С помощью подбора можно найти удовлетворяющий нас коэффициент усиления пропорционального регулятора a, но только для одного входного (а соответственно и для одного выходного значения), т.е. для одной рабочей точки, например, для v(t)=1(t). Нетрудно убедиться, что, если рабочая точка изменится, то система перестанет качественно работать. В данной системе (рис. 7) нелинейность свойств вызвана коэффициентом при управляющем воздействии .
Чтобы исключить влияние указанной нелинейности, другими словами, осуществить точную линеаризацию ОУ [3], необходимо включить в систему блок регулировки параметров с нечетким супервизором. Разумно спроектировать нечеткий супервизор, на выходе которого формировалась бы функция
 . (7)
. (7)
При этом коэффициент пропорционального регулятора целесообразно находить по формуле
 , (8)
, (8)
где  - коэффициент усиления основного регулятора, обеспечивающий выполнение заданных требований в отношении перерегулирования или времени регулирования для v(t)=1(t). Тогда коэффициент kp можно найти по формуле (8), подставляя интересующее нас значение выходной величины y. Для конкретной системы схема, удовлетворяющая поставленной цели управления, может быть представлена в виде рис. 9.
- коэффициент усиления основного регулятора, обеспечивающий выполнение заданных требований в отношении перерегулирования или времени регулирования для v(t)=1(t). Тогда коэффициент kp можно найти по формуле (8), подставляя интересующее нас значение выходной величины y. Для конкретной системы схема, удовлетворяющая поставленной цели управления, может быть представлена в виде рис. 9.
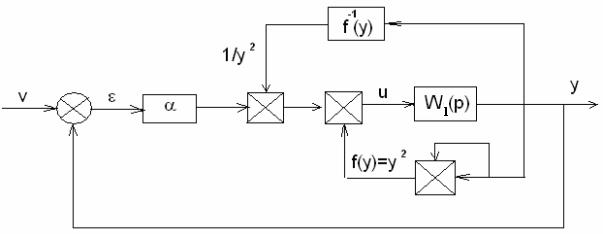
Рис. 9.
Супервизор нейтрализует нелинейность  при всех , поэтому система может рассматриваться как линейная (точно линеаризованная) (см. рис. 10).
при всех , поэтому система может рассматриваться как линейная (точно линеаризованная) (см. рис. 10).
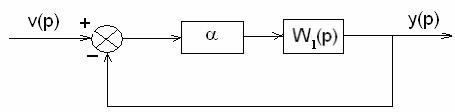
Рис. 10
Отсюда коэффициент a следует выбирать, используя структуру на рис. 10 и исходя из требований, предъявляемых к проектируемой системе.
В общем случае вид функции f(y) точно не задан. Поэтому после определения коэффициента a включаем на вход объекта еще один усилительный блок с заранее неизвестным коэффициентом  (рис. 11). Затем, считая заданным, чему равно f(y) при y=1 (в рассматриваемом случае f(1)=1) определяем реакцию системы (рис.11) на v(t)=1(t) и находим величину перерегулирования
(рис. 11). Затем, считая заданным, чему равно f(y) при y=1 (в рассматриваемом случае f(1)=1) определяем реакцию системы (рис.11) на v(t)=1(t) и находим величину перерегулирования  , которое обычно оказывается меньше заданного значения перерегулирования для проектируемой системы. После чего для каждой требуемой рабочей точки y=yj, j=1,2,…,n, другими словами, для каждого задающего воздействия v(t)=yj1(t) находим путем симуляции модели значение коэффициента j, при котором величина перерегулирования оказывается близкой к величине .
, которое обычно оказывается меньше заданного значения перерегулирования для проектируемой системы. После чего для каждой требуемой рабочей точки y=yj, j=1,2,…,n, другими словами, для каждого задающего воздействия v(t)=yj1(t) находим путем симуляции модели значение коэффициента j, при котором величина перерегулирования оказывается близкой к величине .
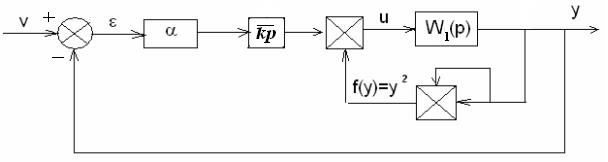
Рис.11
Полученные данные сводим в таблицу 2.
Табл. 2
| y1 | y2 | … | yn |

| 
| … | 
|
Следующий шаг – реализация супервизора, осуществляющего интерполяцию точек, определяемых Табл.2. Такой супервизор можно реализовать, применяя блок задания таблиц Lookup Table из категории Lookup Tables средства Simulink или нечеткий контроллер Такаги-Сугено. В последнем случае приходим к нечеткому супервизору.
Рис. 12 иллюстрирует, каким образом можно аппроксимировать желаемую кривую изменения коэффициента (y) для n=3, т.е. используя три точки (другими словами, три правила) и тем самым осуществить нечеткое супервизорное управление. Разумеется, чтобы повысить точность аппроксимации, можно добавить еще правила, которые очевидно улучшат качество управления.
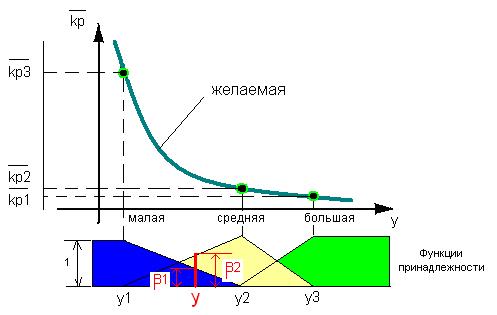
Рис. 12.
Из диапазона изменения управляемой величины y измеряются три значения y, им присваиваются характеристики малая, средняя и большая. Далее выбираются треугольные функции принадлежности. Используя полученные данные, можно составить нечеткие правила для данного случая (трех выбранных точек)(трех оредставляется действительным между ложью и истиной.:
Если управляемая величина y большая, То коэффициент усиления  .
.
Если управляемая величина y средняя, То коэффициент усиления  .
.
Если управляемая величина y малая, То коэффициент усиления  .
.
При этом
 , (9)
, (9)
где  ,
,  ,
,  - переменные, показывающие степень истинности данной предпосылки.
- переменные, показывающие степень истинности данной предпосылки.
Правила не аналогичны заданию таблиц, так как нечеткая арифметика интерполирует форму нелинейной функции. Показано, что объем памяти, требуемый для хранения информации о функциях принадлежности и правил значительно меньше, чем для таблиц задания, в особенности для систем с несколькими входами, в результате чего скорость вычислений может быть повышена.
Наконец, заменяя блок  (рис. 9) блоком задания таблиц или нечетким супервизором, получаем искомую систему, которая должна удовлетворять предъявляемым требованиям.
(рис. 9) блоком задания таблиц или нечетким супервизором, получаем искомую систему, которая должна удовлетворять предъявляемым требованиям.

