




Рівень складності А
| 9А1. Якщо завантаження і розвантаження машини здійснюється без її зупинки то така машина називається: г) машиною безперервного транспорту; | 9А2. Який конвеєр зображений на рисунку 9А1: г) стрічковий;

| 9А3. Який конвеєр зображений на рисунку 9А2: в) скребковий:

|
9А4. Який конвеєр зображений на рисунку 9А3: д) пластинчастий.
| 9А5. На рисунку 9А4 представлено: д) ковшовий елеватор.

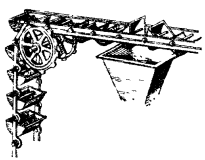
| 9А6. Який конвеєр зображений на рисунку 9А5: б) ковшовий;
|
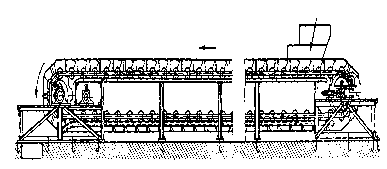
9А7. Який конвеєр зображений на рисунку 9А6: г) гвинтовий;

| 9А8. На рисунку 9А7 представлено схему: г) пневмотранспортної установки; 
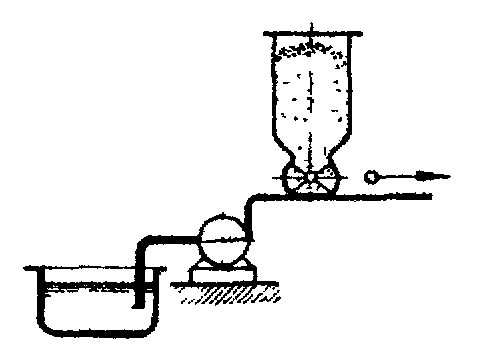
| 9А9. На рисунку 9А8 представлено схему: д) гідротранспортної установки.
|
9А10. Вантаж, який представлений на рисунку 9А9 називається: в) рядовим;

| 9А11. Вантаж, який представлений на рисунку 9А10 називається:
г) сортованим;

| 9А12. Що називається гранулометричним складом вантажу: в) кусковатість, яка характеризується лінійними розмірами частинок вантажу; |
| 9А13. Ступінь рухливості вантажу визначається: в) кутом природного укосу в стані спокою; | 9А14. Розмірність насипної щільності: г) кг/м3; | 9А15. Експлуатаційною продуктивністю називають: г) кількість вантажу, яка переміщається за одиницю часу, і визначається з врахуванням фактичних умов роботи машини і можливістю переміщення вантажу з різними властивостями; |
9А16. Який конвеєр зображений на рисунку 9А16: д) підвісний.

| 9А17. Який конвеєр зображений на рисунку 9А17: а) візковий перекидний вертикально замкнутий;
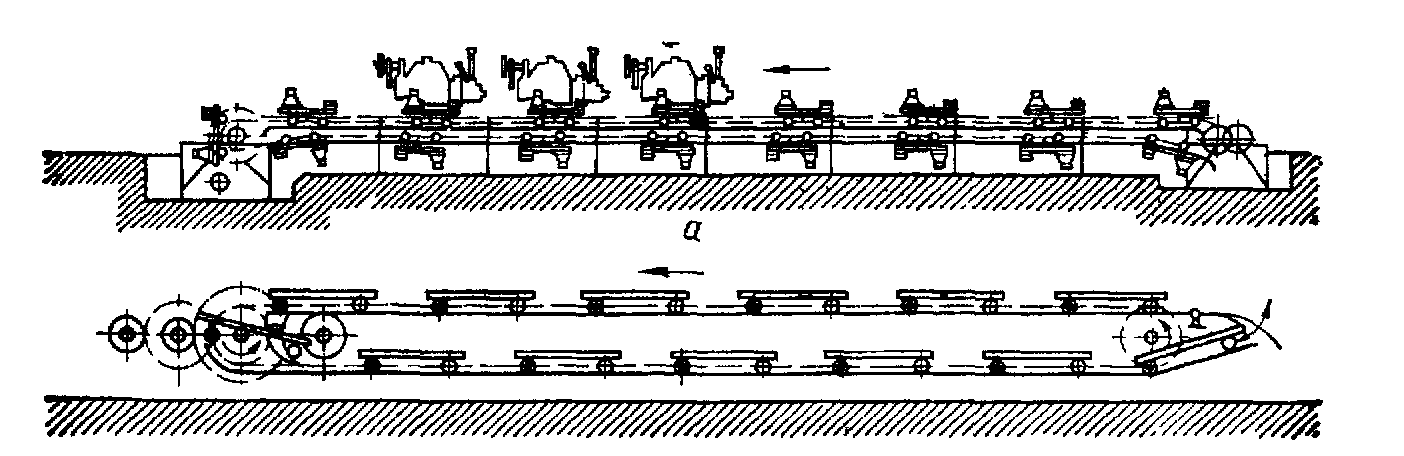
| 9А18. Який конвеєр зображений на рисунку 9А18: б) візковий неперекидний вертикально замкнутий;

|
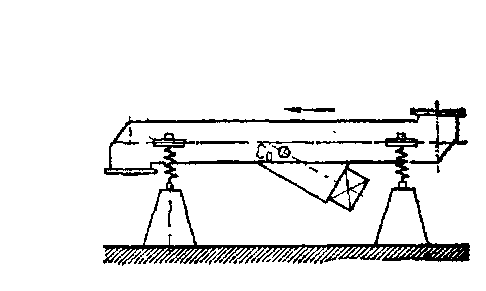
9А19. Який конвеєр зображений на рисунку 9А19: д) вібраційний з електромеханічним приводом на підвісках.

| 9А20. Який конвеєр зображений на рисунку 9А20: б) вібраційний з електромагнітним вібратором;

| 9А21. Який конвеєр зображений на рисунку 9А21: г) вібраційний на опорах;
|
9А22. На рисунку 9А22 зображена схема: а) приводного роликового конвеєра;

| 9А23. На рисунку 9А23 представлено схему: в) приводу роликового конвеєра;

| 9А24. Який конвеєр зображений на рисунку 9А24: г) крокуючий з гідравлічними механізмами підіймання

|
9А25. На рисунку 9А25 зображено: д) транспортувальна труба.

|
Рівень складності В
9В1. Як називається параметр, визначений за формулою  :
г) середньою кількістю вантажу, віднесеної до одиниці довжини вантажонесучого елемента машини; :
г) середньою кількістю вантажу, віднесеної до одиниці довжини вантажонесучого елемента машини;
| 9В2. Секундна масова продуктивність визначається за формулою:
б)  ; ;
| 9В3. Годинна масова продуктивність визначається за формулою:
в)  ; ;
|
9В4. За якою формулою визначається масова продуктивність конвеєра, наведеного на рисунку 9В4_9A5:
д) 

| 9В5. За якою формулою визначається об′ємна продуктивність елеватора, наведеного на рисунку 9В5_9A4:
б) 

| 9В6. За якою формулою визначається продуктивність при переміщенні окремих штучних вантажів:
д) 
|
9В7. За якою формулою визначається продуктивність при переміщенні окремих штучних вантажів партіями:
д) 
| 9В8. За якою формулою визначається масова продуктивність конвеєра, наведеного на рисунку 9B1:
д)

| 9В9. Потужність двигуна приводу вантажонесучого елемента машини витрачається: в) на подолання сил опору, які виникають: при переміщенні вантажонесучого елемента; при підійманні вантажу на певну висоту; внаслідок жорсткості стрічки або каната, при їх русі на криволінійних дільницях траси, сил тертя, які виникають в підшипниках опор, барабанів і зірочок, сил опору в вузлах завантаження і розвантаження, сил тертя в елементах приводу |
9В10. За якою формулою визначається лінійне навантаження від ваги вантажу, який переміщається:
б) 
| 9В11. В формулі для визначення сили опору роликових опор рухові стрічки  величини Х і У, згідно розрахункової схеми, зображеної на рис. 9В2, потрібно замінити на:
в) WXP i qXP; величини Х і У, згідно розрахункової схеми, зображеної на рис. 9В2, потрібно замінити на:
в) WXP i qXP;
| 9В12. В формулі для визначення сили опору роликових опор рухові стрічки  величини Х і У, згідно розрахункової схеми, зображеної на рис. 9В3, потрібно замінити на:
в) WPP i qPP; величини Х і У, згідно розрахункової схеми, зображеної на рис. 9В3, потрібно замінити на:
в) WPP i qPP;

|
9В13. В формулі  величини Х і У, згідно розрахункової схеми, зображеної на рис. 9В4, потрібно замінити на:
а) G′ і tgβ; величини Х і У, згідно розрахункової схеми, зображеної на рис. 9В4, потрібно замінити на:
а) G′ і tgβ;

| 9В14. В формулі  величини Х і У, згідно розрахункової схеми, зображеної на рис. 9В4, потрібно замінити на:
а) G′ і sinβ; величини Х і У, згідно розрахункової схеми, зображеної на рис. 9В4, потрібно замінити на:
а) G′ і sinβ;

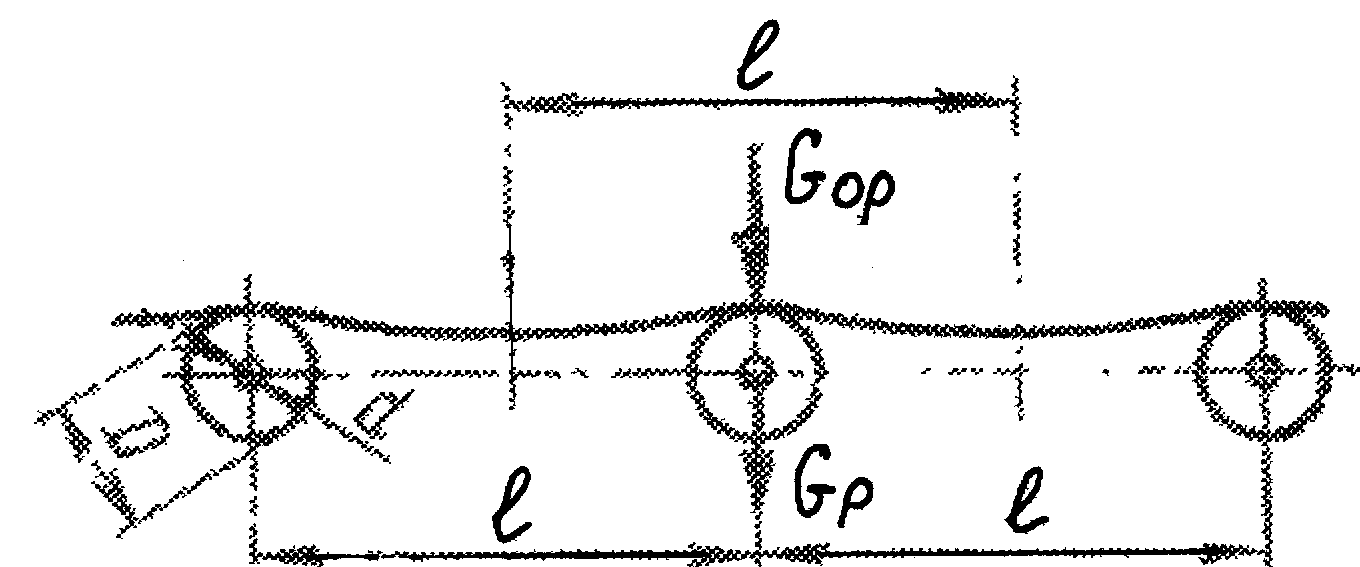
| 9В15. В формулі для визначення сили опору рухові стрічки  величини Х і У, згідно розрахункової схеми, зображеної на рис. 9В5, потрібно замінити на:
г) qXP i q0; величини Х і У, згідно розрахункової схеми, зображеної на рис. 9В5, потрібно замінити на:
г) qXP i q0;

|
9В16. В формулі для визначення сили опору рухові тягового органу  величини Х і У, згідно розрахункової схеми, зображеної на рис. 9В16, потрібно замінити на: г) qВ i q0; величини Х і У, згідно розрахункової схеми, зображеної на рис. 9В16, потрібно замінити на: г) qВ i q0;

| 9В17. В формулі для визначення сили опору рухові тягового органу  величини Х і У, згідно розрахункової схеми, зображеної на рис. 9В7, потрібно замінити на:
г) q0 і ω; величини Х і У, згідно розрахункової схеми, зображеної на рис. 9В7, потрібно замінити на:
г) q0 і ω;

| 9В19. За якою формулою визначається зв′язок між натягами SНБ і SЗБ (див. рис.9В8):
в) 

|
9В20. За якою формулою визначається зв′язок між натягами SНБ і SЗБ(див. рис.9В19): в) 

|

