




Це код з трьома рівнями сигналів. Зміна сигналу відбувається на початку передавання біта. Якщо передається нуль,то зміни нема, а якщо одиниця, то відбувається зміна рівня сигналу на наступний, (0, 1, 0, -1, О,...). У сигналі коду MLT-3 неможливе синхронізування, однак такий сигнал генерує менше завад (ЕМІ) за рахунок меншої інтенсивності змін кодового сигналу.
Код 4В5В
Цей код використовують як додаток до інших методів кодування, наприклад до NRZ. У цьому методі кодування до кожних чотирьох бітів додають п'ятий. Із 32 комбінацій 5-бітового коду є 16 інформаційних, деякі службові та заборонені комбінації. Заборонені, наприклад, усі комбінації, в яких є три нулі та більше нулів (сім комбінацій). Виявлення такої комбінації - сигнал про помилку. Відсутність довгих нульових послідовностей полегшує синхронізацію. Схема кодування 4В5В використана в 100Base-T4 (TP-PMD).
Код РАМ-5
Кодом РАМ-5 кодують комбінації з двох бітів. Чотирьом можливим комбінаціям (00,01,10,11) відповідає певний рівень сигналу. П'ятеня зумовлює надлишковість, яку використовують для виявлення помилок. Код РАМ-5 застосовують для передавання в 1000 Base-TX паралельно по чотирьох парах. Швидкість передавання по одній з них - 250 Мбіт/с за тактової частоти 125 МГц.
ТЕСТИ ДЛЯ САМОКОНТРОЛЮ
Синхронне передавання:
а) використовується у низькошвидкісних мережах;
б) вимагає для передавання синхросигналу окремого дроту;
в) забезпечує синхронізацію на початку байта;
г) під час відсутності передавання інформації користувача пе
редається синхронізуючий сигнал;
2. Кодування - це:
а) шифрування інформації з метою її захисту;
б) процедура перетворення сигналу в іншу форму цифрового сиг
налу з метою більшої завадостійкості та швидкості переда
вання;
в) створення сигналу даних на підставі вихідної цифрової інфор
мації;
г) перетворення аналогового сигналу.
3. Чому код MLT-3 забезпечує менше випромінювання у довкілля?
4. Де використовують асинхронне передавання?
а) в каналах локальних мереж;
б) у швидкісних послідовних каналах;
в) для паралельного передавання на невелику відстань;
г) у низькошвидкісних послідовних каналах.
5. Плезіохронна цифрова Ієрархія — це:
а) набір пропускних здатностей мереж: зв 'язку;
б) стандартизований набір швидкостей передавання мідним ка
белем;
в) набір швидкостей передавання волоконно-оптичним кабелем;
г) впорядкована послідовність цифрових каналів зв 'язку.
M
Частина II
1 ТЕХНОЛОГІЇ ІНТЕРФЕЙСНИХ, ЛОКАЛЬНИХ ТА ГЛОБАЛЬНИХ КОМП'ЮТЕРНИХ МЕРЕЖ
ТЕХНОЛОГІЇ ІНТЕРФЕЙСНИХ МЕРЕЖ ЛОКАЛЬНІ МЕРЕЖІ БЕЗПРОВІДНІ МЕРЕЖІ ОБ'ЄДНАННЯ ЛОКАЛЬНИХ МЕРЕЖ
МЕРЕЖЕВІ ТЕХНОЛОГІЇ "ОСТАННЬОЇ" МИЛІ ТА ДОМАШНІ МЕРЕЖІ
ГЛОБАЛЬНІ МЕРЕЖІ
ТЕМА 5
ТЕХНОЛОГІЇ ІНТЕРФЕЙСНИХ МЕРЕЖ
5.1. Комп'ютерні інтерфейси
Спосіб організації та параметри передавання даних комп'ютером визначають числові та якісні характеристики доступу користувача до комп'ютерної мережі. В цьому розділі ми розглянемо комп'ютерні інтерфейсні технології, тобто технології, які використовують для приєднання периферійних пристроїв та організації невеликих мереж у безпосередньому оточенні комп'ютера (завдовжки від декількох до десятка метрів).
Бурхливий розвиток інтерфейсних технологій останнім часом привів до появи нових інтерфейсних портів, що підтримують технології USB або FireWire. У сучасних комп'ютерах поступово відмовляються від послідовного та паралельного портів, замінивши їх портами USB, Firewire, Bluetooth. Комп'ютери без застарілих типів портів (legacy free PC) мають простіше внутрішнє компонування, і значно ліпші параметри передавання.
5.2. Шини вводу-виводу комп'ютера
Архітектура вводу-виводу комп'ютера безпосередньо висуває обмеження щодо параметрів передавання даних. Розуміння цієї архітектури важливе й тому, що найновіші вирішення у цій області застосовують багато підходів, які були вперше розроблені для передавання на більші відстані у комп'ютерних мережах.
Шина РСІ Загальна характеристика та історія
| І |
# Шина РСІ - це паралельна шина для приєднання периферійних пристроїв.
Специфікація РСІ була розроблена корпорацією Intel у 1992 р. (версія 1.0). У 1993 р. з'явилася версія 2.0.

|
| Головні компоненти сучасного ПК обмінюються інформацією за посередництвом системних шин і під управлінням схемної логіки г реалізованої у наборі мікросхем (чіпсеті) (див. рис. 5.1). В. структурі ПК такі компоненти як центральний процесор, пам'ять та відеосис-тема взаємодіють особливо інтенсивно. У комп'ютері на базі РСІ їх взаємодія відбувається за посе- |
Шина РСІ замінила популярні раніше шини ISA, EISA та VLB. У свій час це була революційна розробка, яка у значній мірі підвищувала продуктивність комп'ютерів.
' - j —
редництвом спеціальної мікросхеми (північного мосту) (рис. 5.2).
Всі інші пристрої та сама шина РСІ взаємодіють з процесором та пам'яттю за посередництвом іншої мікросхеми - південного мосту.,ПК використовує велику кількість різноманітних шин та інтерфейсів для приєднання різного типу пристроїв (наприклад, для відеопідсистеми -AGP, жорстких дисків - АТА, периферійних пристроїв - РСІ). В значній мірі така різноманітність була породжена обмеженнями які має шина РСІ, коли параметри продуктивності цього інтерфейса не змогли задо-вільнити вимог щодо передавання. В ідеальній системі всі потреби щодо передавання між комп'ютерними підсистемами мала би задовільнити одна єдина шина.
Шина РСІ використовується сумісно багатьма приєднаними при-гтппямм Лпя ктрпувяння почполілом шини між поистооями викоиис

|
товують схему арбітражу шини. Власнеця схема вирішує
якому пристрою дозволено захопитишину для передавання. Захопивши шину,.—пристрій обмінюється даними з центральним процесором І
та пам'яттю за посередництвом південного мосту.
Процесор бачить периферійні пристрої як певні області пам'яті у своєму адресному просторі, так що він може читати і записувати команди та дані у ці області. При завантаженні комп'ютера РСІ шина ініціалізується і для периферійніих пристроїв виділяються діапазони адрес пам'-
яті для взаємодії з ЦП. Після ініціалізації пристрої переходять у режим чекання. У цьому режимі вони прослуховують шину, чекаючи на команди та дані.
Шина РСІ сполучена з локальною шиною процесора через мікросхеми мостів напряму. Це дає змогу одночасно виконувати декілька операцій, наприклад, зчитування пам'яті процесором та роботу пристрою з кешем моста. Це також забезпечило незалежність шини РСІ від типу процесора (тому РСІ працюють, наприклад у комп'ютерах Macintosh та з процесорами Alpha).
Версії та параметри продуктивності шини РСІ
Версія 1.0. Ширина шини-32 біти. Тактова частота-33 МГц. Максимальна швидкість передавання - 133 Мб на секунду.
Версія 2.2. Ширина шини- 64 біти. Тактова частота- 66МГц. Максимальна швидкість передавання - 533 Мб на секунду.
У шині РСІ передавання адрес і даних відбувається в різних циклах. Однак завдяки підтримці пакетного передавання та режиму володіння шиною передавання значно прискорене. Перед початком такого передавання передавач та приймач домовляються про обсяги передавання, а потім передавання відбувається безперервним потоком, який не можуть перервати інші пристрої.
Шина РСІ підтримує автоматичне конфігурування, Plug-and-Play, прямий доступ до пам'яті, перевіряння даних на парність.
На відміну від ISA, у якій кожен периферійний пристрій повинен користуватися окремим перериванням, РСІ дає змогу кільком пристроям застосовувати одне переривання. В ISA реалізоване "переривання за фронтом" (edge-triggered interrupt), тоді як у РСІ - переривання за рівнем (level-triggered nterrupt). У разі переривання за рівнем ПК відстежує рівень напруги на лінії переривань (а їх у РСІ чотири). Якщо рівень напруги змінився, наприклад, з 5 В до 0 -то це означає, що один з пристроїв, приєднаних до лінії, виставляє переривання. Після цього процесор опитує всі пристрої, приєднані до лінії, та визначає джерело переривання і передає керування програмі опрацювання переривань. Якщо після обслуговування переривання стан лінії відновився, то система починає виконувати інші функцій, інакше процес опитування поновлюється. Таким способом можна швидко опрацювати переривання від декількох пристроїв або чергу переривань від одного пристрою. В шині ISA, де про наявність переривання сигналізують імпульси по призначених для кожного пристрою лініях, можливе було "випадання" переривань; якщо процесор опрацьовує одне переривання, то ще один імпульс на лінії непомічений.
Недоліком шини РСІ є невелика кількість роз'ємів периферійних пристроїв, які можна приєднати до неї. Причина цього полягає в обмеженнях навантаження шини. Кожен пристрій, приєднаний до шини, генерує та керований електричними сигналами. Якщо таких пристроїв

|
багато, то розкид можливих значень струму й напруги на шині стає значним і може призвести до згорання мікросхем. Тому кількість пристроїв на шині РСІ обмежена десятьма; контролер РСІ на материнській платі теж є одним з них. Кожен слот РСІ вважають двома периферійними пристроями (він може підтримувати два пристрої РСІ на одному адаптері). (Крім того, є пристрої РСІ, інтегровані на материнській платі ПК, наприклад, контролери дисків АТА). Отже, максимальна кількість рознять РСІ на одній шині -три. Нестача рознять РСІ особливо відчутна для серверних
на для серверних вирішень, адже вони,як звичайно працюють з великою кількістю жорстких дисків та іншої периферії. Тому в серверах вводять додаткові шини РСІ, І використовуючи спеціальні мости (рис. 5.3).
Поява гігагерцових процесорів, що працюють з шиною пам'яті завширшки 64 біти, з одного боку, а також поява гігабітових локальних мереж, з іншого, привели до того, що шина введення-виведення РСІ стала вузьким місцем. Максимальна швидкість передавання для 64-роз-рядної шини РСІ частоти 66 МГц сягає 533 Мбайти за секунду, що недостатньо для сучасних застосувань. Можливість захоплення шини одним з пристроїв створює небезпеку блокування інших пристроїв. Крім того, шина РСІ не підтримує заміни адаптерів у гарячому режимі (за винятком специфікації Hot Plug PCI, розробленої фірмою Compaq), що необхідно для серверів, які працюють постійно. Загальна довжина шини, особливо на високих частотах, обмежена 90 см, що також недостатньо.
Недоліки РСІ та значне збільшення параметрів продуктивності периферійних пристроїв спонукають інженерів розробляти нові архітектури шин уведення-виведення. Як звичайно, ці архітектури вже грунтуються на технологіях комутації. Як приклад, розглянемо декілька таких архітектур.
Шина РСІ-Х
Специфікацію РСІ-Х запропонували фірми Compaq, IBM, HP 1998 p. Ця технологія працює на шині РСІ та вводить у ній деякі поліпшення, завдяки яким швидкість передавання суттєво збільшується (за частоти 133 МГц, ширини шини 64 біти швидкість становить 1066 Мбайт/с).
РСІ-Х 2.0 визначає шини з тактовими частотами 266 MHz та 533 MHz, що дозволяє досягнути максимальних швидкостей передавання до 2133 Мбайт/с.
У попередній шині РСІ декодування отриманого сигналу приймачем відбувалося під час того ж циклу шини, що й передавання. Це створювало жорсткі вимоги щодо часу декодування, та було перешкодою до збільшення тактової частоти шини. В технології РСІ-Х для декодування виділено окремий цикл шини, який незначно збільшує загальний час передавання.
У РСІ-Х до складу кожної трансакції передавання введена нова атрибутивна фаза, під час якої у 36-бітовому полі відбувається передавання даних про обсяг трансакції, її ініціатора, порядку проходження тощо.
Незважаючи на збільшення продуктивності, у шині РСІ-Х проблеми, властиві РСІ не були вирішені. Навпаки, технічних проблем з цією специфікацією стало більше. Збільшення ширини шини призвело до збільшення перехресних наведень, а збільшення тактової частоти зробило шину чутливішою до різних шумів та наведень.
Тому специфікація РСІ-Х не була широко впроваджена, її повинні замінити специфікації на базі комутованих структур, такі як РСІ Express.
Шина РСІ-е
РСІ Express (РСІ-е) є шиною, що реалізує головні принципи шини РСІ, але базується на новій архітектурі фізичного рівня.
Головною відмінністю шини РСІ-е від попередниці є перехід від архітектури зі спільною шиною до комутованої архітектури. Центром всіх комунікацій стає мікросхема комутатора, яка комутує потоки даних (рис. 5.4).
Перехід до комутованої архітектури дозволив:
^ спростити та здешевити комунікації між пристроями комп'ютера:
^> впровадити пріоритетне обслуговування для різних сполучень (реалізується комутатором)

|
^ команди та дані передаються у вигляді коротких пакетів.
Тому жоден з пристроїв не зможе моно-польно захопити та завантажити шину своїм передаванням. Ефективніше використовується пропусна здатність шини.
З'єднання між комутатором та пристроєм у шині РСІ-е називається
каналом (link). У свою чергу, канал може складатися з одного або більше lane. Lane - це базовий елемент сполучення РСІ-е. По кожному lane можна передавати одночасно один байт у дуплексному режимі. Один lane забезпечує швидкість передавання у 2.5 Гб/с. Якщо перепускної здатності одного lane недостатньо, окремі lane можна групувати, пропорційно нарощуючи пропускну здатність. Link який складається з одного lane позначають хі, двох - х2, і т. д. Шина РСІ-е може мати ширину xl,x2,x4,x8,xl6, тах32.
На практиці перехід до повністю комутованої архітектури вводу-виводу відбувається поступово. Для підтримки існуючої архітектури РСІ, наприклад у чіпсеті серії 900 фірми Intel, функції комутатора відіграють мікросхеми північного та південного мостів, до якого приєднують як канали РСІе, так і традиційні інтерфейси РСІ.
5.3. Передавання даних через послідовний порт RS 232C
Передавання даних через послідовний порт стандарту RS-232C використовує двопровідну лінію зв'язку, двополярні сигнали амплітудою 25 В. Стандарт розроблено в період слабкого використання інтегральних мікросхем. Максимальна швидкість передавання даних - 20 Кб/с, однак реальна швидкість залежить від відстані передавання.
-
Стандарт RS-232C розроблено ще 1969 р. американською асоціацією електронної промисловості (American Electronics Industries Association (AEIA, TEIA)), тому його інколи позначають як ЕІА RS-232C. ITU розробив комплекс аналогічних стандартів V.24 (механічні характеристики) і V.28 (електричні характеристики), які за функціями відповідають ЕІА RS-232C.
Багато ПК мають апаратуру послідовного порту введення-виведен-ня, виконаного відповідно до стандарту RS-232C. Тому розглянемо інтерфейс RS-232C детальніше.
Спочатку інтерфейс RS-232C був призначений для приєднання терміналів. Сьогодні до послідовного порту приєднують модеми, віддалені принтери, плотери, мишку та інше обладнання.
У ПК реалізовано до чотирьох послідовних портів (СОМ1-СОМ4). Роз'єднувач послідовного порту на панелі ПК має 25 або 9 контактів (найчастіше використовують тільки дев'ять з них). Керуючим пристроєм послідовного порту є мікросхема UART (Universal Asynchronous Receiver/Transmitter), яка перетворює паралельний код у послідовний та передає його побітово у лінію, додаючи біти старту, зупинки та кон-тпппю Тяким ппотбом Rirr6v-

|
| 4 nt (DCE)), інший - підлеглим (Data 5.5). |
тролю. Таким способом відбувається асинхронне передавання. Через послідовний порт дані можна передавати на відстань до ЗО м. Під час передавання даних один з комп'ютерів є головним (Data Communication Equipment Terminal Equipment (DTE)) (рис. 5
5.4. Технологія USB
j # USB (Universal Serial Bus) - послідовна шина для приєднання пе- I риферійних пристроїв до комп 'ютера.
Історія розробки та версії
Стандарт USB розроблено фірмою Intel (уперше його підтримку реалізовано у чіпсеті Triton II - 82430НХ), його підтримують усі наступні чіпсети цієї фірми. Одночасно з Intel над стандартом працювали IBMCompaq, Digital, Microsoft, NEC, Northern Telecom; вони створили консорціум USB Implement Forum, який займається розвитком USB.
Шина USB дає змогу приєднувати, налаштовувати, використовувати пристрої під час роботи госта. Розподіл перепускної здатності шини, планований гостом та реалізовуваний шляхом розсилання маркерів.
Інтерфейс USB 1.0. працює зі швидкістю 12 Мбіт/с. Підтримуваними є два окремі канали передавання - високо- та низькошвидкісний. Швидкість передавання у низькошвидкісному каналі -1,5 Мбіт/с. Версія USB 2.0 працює зі швидкістю, в 40 разів більшою, тобто 480 Мбіт/с для швидкісного каналу.
Будова та порядок роботи
Топологія. У мережі USB є три типи пристроїв:
> гост (точніше, контролер USB госта) керує передаванням;
> хаб (концетратор) організовує приєднання інших хабів та при
строїв;
> функція - відповідає певному кінцевому пристрою, приєднаному до
мережі з чітко визначеною прикладною функцією (насправді в одному
пристрої може бути реалізовано і декілька різних функцій).
Мережа має топологію дерева, у корені якого розташований гост-контролер, гілками є хаби, а листям - функції. Звичайно гост-контро-лер інтегрований з кореневим хабом (Root hub), що забезпечує декілька портів (найчастіше-два) для приєднання пристроїв. Логічно пристрій, приєднаний до будь - якого хаба USB і правильно сконфігурований, можна трактувати як приєднаний безпосередньо до госта-контролера.
Функції відображають пристрої, здатні приймати та передавати інформацію по шині, реагувати на керівну інформацію. Вони можуть бути суміщені з хабом. Перед використанням функція повинна бути сконфігурована - для неї треба виділити частину смуги пропускання та обрати параметри налаштування.
Хаб - це кабельний концентратор. Він має декілька портів. У кожного хаба є висхідний порт (Upstream port), призначений для приєднання до госта або хабу верхнього рівня, та низхідні порти (downstream ports), призначені для приєднання хабів нижнього рівня та функцій. Хаб розпізнає приєднання та від'єднання пристрою від порту, може керувати живленням та обмежувати струм, що споживає порт. Хаб ізолює висо-кошвидкісні сегменти від низькошвидкісних.
Усім процесом передавання керує контролер. Він опитує приєднані пристрої, визначає пріоритети передавання, планує та дозволяє передавання. Отже, у мережі USB реалізовано певну модифікацію методу доступу з опитуванням.
Логічна структура, В системі USB можна виділити по три логічні рівні для госта і фізичного пристрою. Пристрій USB містить інтерфей-сну частину, частину пристрою і функційну частину. Гост має інтер-фейсну частину, системну та програмне забезпечення (ПЗ) пристрою.
ПЗ пристрою відповідає конкретному пристрою, та виконується на гост-комп'ютері (драйвер). Частиною гост-системи USB є системне ПЗ, яке створює системну підтримку USB, незалежну від конкретних пристроїв. Контролер госта USB - це апаратні та програмні компоненти, які реалізують обмін даними.
Модель передавання даних. Кожен пристрій USB можна описати як набір кінцевих точок (Endpoint), з якими гост-котролер обмінюється інформацією. Кінцеві точки мають низку параметрів, зокрема: Ч> номер точки, який однозначно ідентифікує її; Ч> необхідну частоту доступу до шини та допустимі затримки обслуговування;
0> потрібну пропускну смугу каналу; 0> вимоги до опрацювання помилок;
Ч> максимальні розміри пакетів, що приймаються та передаються; Чо тип обміну; Ч> напрям обміну.
Кожен пристрій має кінцеву точку з нульовим номером яка призначена для керування і завжди сконфігурована в разі приєднання пристрою до шини. Крім точки керування, можуть бути і додаткові точки, які реалізують корисний обмін даними. Низькошвидкісні пристрої можуть мати до двох додаткових точок, високо швидкісні - до 16 точок уведення і 16-виведення. Точки не можуть бути використані до їхнього конфігуру-вання (налаштування між точкою та гост-контролером каналу).
Канал (Pipe) описує модель передавання даних між гост-контролером та кінцевою точкою пристрою. Є два типи каналів: потоки (Stream) та повідомлення (Messages). Потік завжди однонапрямлений та доставляє дані з одного кінця каналу до іншого. Один номер кінцевої точки можна використовувати для позначення двох потоків (уведення та ви-ведення). Потік виконує такі типи обміну: суцільний, ізохронний, переривання. Дані потоку для USB неструктуровані.
З каналами пов'язані характеристики, відповідні для кінцевої точки (див. вище).
Під час роботи з повідомленнями гост надсилає запит до кінцевої точки, а потім передає (або приймає) пакет повідомлення, після цього відбувається передавання пакета стану кінцевої точки. Повідомлення опрацьовує гост, а після чого надходить наступне. Для доставлення повідомлень використовують обмін типу керування. Для кожного ввімкненого пристрою є канал повідомлень (Control Pipe 0), по якому і відбувається передавання інформації конфігурування, керування та стану.
Типи передавань даних. USB підтримує як одно-, так і двонапрямле-ний режими передавання. Передавання завжди відбувається між ПЗ госта та кінцевою точкою пристрою. Пристрій може одночасно підтримувати декілька каналів з різними кінцевими точками. Архітектура USB визначає чотири типи передавання даних:
•^ керівні пересилання (Control transfers). Використовують для конфігурування, ініціалізації пристроїв, керування ними. Протокол USB забезпечує гарантоване доставлення таких даних. Довжина поля даних такого пересилання не перевищує 8 байтів для низької швидкості і 64 - для високої;
•^ суцільні передавання (Bulk Data Transfers). Передають великі пакети без чітких вимог до часу доставлення. Пакети займають усю вільну смугу пропускання каналу, однак мають найнижчий пріоритет. Такі передавання відбуваються тільки на повній швидкості;
^переривання (Interrupt) -короткіпередавання (максимально8байт для низької швидкості, 64-для високої швидкості). Таким способом, наприклад, відбувається передавання окремого символу, уведеного з клавіатури, або координати курсора. Переривання є спонтанними і не повинні бути обслужені повільніше, німе того потребує відповідний пристрій;
•Ь ізохронні передавання (Isochronous Transfers) - передавання у ре-аАШому Масштабі часу, займають заздалегідь узгоджену частину про-ЩЄкНої спроможності каналу, мають заданий час передавання. У випадку виникнення спотворень недійсні пакети ігноровані.
Смуга перепускання шини USB розподілена між усіма каналами. Якщо надходить запит на виділення нового каналу, а перепускна здатність шини з урахуванням уже налаштованих каналів цього не дозволяє, запит буде відхилено.
Ізохронні передавання за типом синхронізації надавача та одержувача даних поділяють на >асинхронні, Асинхронні, >адаптивні. Вони визначають відповідні типи каналів USB.
Протокол обміну USB. Усі обміни (трансакції) складаються з трьох пакетів. Кожна трансакція планована і відбувається з ініціативи контролера, який надсилає пакет-маркер (Token Packet). Він містить тип і напрям передавання, адресу пристрою USB, номер кінцевої точки. Трансакція відбувається між гостом та кінцевою точкою. Джерело даних передає пакет або повідомлення про відсутність даних. Після успішного приймання приймач даних надсилає пакет підтверження (Handshake Packet).
Пристрій може відмовитися від запланованої трансакції надсилаючи відповідне повідомлення, якщо його буфери близькі до переповнення зверху або знизу (переповнення знизу - недостатня для ефективного передавання кількість даних). Маркери знехтуваних трансакцій повторно передаються у вільний для шини час. Планування передавань контролером дає змогу обслуговувати всі канали згідно з наявними вимогами.
Для виявлення помилок кожен пакет має CRC-код, що дає змогу виявляти всі одиничні та подвійні помилки. Апаратне забезпечення виявляє помилку передавання і після трьох невдалих спроб повідомляє клієнтське ПЗ.
Порядок роботи. Кожну трансакцію ініціює гост-контролер надсиланням маркера і завершує пакетом підтведження. Структуратрансакції така:
IN - Data - Handshake OUT - Data - Handshake
Контролер циклічно (з періодом 1 мс) формує кадри, в які укладаються всі заплановані трансакції. Кожен кадр починається надсиланням маркера SOF (Start of Frame), який є синхронізувальним сигналом для всіх пристроїв. У кінці кожного кадру виділено інтервал часу - (End of Frame (EOF)), упродовж якого хаби забороняють передавання у напрямі до контролера. Кожен кадр має номер. Гост-контролер оперує 32-бітовим лічильником, але в маркері SOF використовано тільки молодші 11 біт. Номер кадру збільшується у період EOF. Ґост планує завантаження кадрів так, щоби в них було місце для трансакцій керування та переривання. Вільний простір заповнюють суцільні передавання.
Для ізохронного передавання важливою є синхронізація контроле-pa та пристрою. Це завдання має такі варіанти вирішення:
> внутрішній генератор пристрою синхронізований символами SOF;
> частота кадрів налаштовується на частоту пристрою;
> швидкість передавання (приймання) пристрою узгоджена з часто
тою кадрів.
Частота кадрів контролера налаштовується на частоту внутрішньої синхронізації тільки одного пристрою. Період кадру може змінюватися в межах однобітового інтервалу.
Налаштування системи. Налаштування системи. USB підтримує динамічне приєднання і від'єднання пристроїв та їхнє автоматичне налаштування. Кожен хаб визначає стан своїх портів та відстежує ситуації приєднання і від'єднання пристрою й повідомляє про це контролер. Гост дає дозвіл на роботу порту і зв'язується з ним із використанням нульової адреси керування. Він визначає чи є новий пристрій ха-бом або функцією, та присвоює йому унікальну USB-адресу, а також створює канал керування з пристроєм через нульову кінцеву точку та USB-адресу. Якщо новий пристрій є хабом, то аналогічну операцію повторюють для всіх його портів. Якщо ж пристрій є функцією, то повідомлення про приєднання передає диспетчер USB відповідному ПЗ.
Якщо пристрій від'єднують, то хаб забороняє відповідний вихідний порт та повідомляє контролера, який видаляє пристрій з усіх таблиць керування. У випадку хабу аналогічну процедуру повторюють для всіх приєднаних пристроїв. У разі функції про факт від'єднання повідомляють відповідне ПЗ.
Функції пристроїв USB. Розглянемо головні функції, які виконують пристрої USB:
-Ь динамічне приєднання та від 'єднання. Після сигналу скидання пристрій повинен відгукуватися на нульову адресу. Після отримання USB-адреси, пристрій повинен відгукуватися тільки на цю адресу;
•Ь конфігурування пристрою виконує гост. У цьому разі використовувана інформація, зчитана з самого пристрою. Пристрій може мати багато інтерфейсів, кожному з яких відповідає своя кінцева точка. Інтерфейс може мати декілька альтернативних наборів характеристик. Для підтримки адаптивних драйверів дескриптори пристроїв мають поля класу, підкласу і протоколу;
•> передавання даних. Один з чотирьох визначених вище типів;
•Ь керування енергоспоживанням. У разі приєднання до шини пристрій не може споживати струм понад за 100 мА. У робочому режимі можна зробити заявку на струм до 500 мА;
•^ пристрій USB повинен підтримувати режим припинення (Suspended Mode), у якому споживає струм не більше 500 мкА. У випадку припинення активності шини пристрій автоматично зупиняється;
•^ можливість віддаленого пробудження (Remote Wakeup) дає змогу припиненому пристрою подати сигнал гост-контролеру, який також: може перебувати в припиненому стані, і поновити роботу системи.
Функції хабів. Хаб > комутує сигнали, > видає напругу живлення, >відстежує стан своїх портів. Він складається з контролера та повто-рювача. Повторювач є керованим ключем, що сполучає вихідний порт з вхідним. Контролер містить регістри пам'яті для взаємодії з гостом. Зміст цих регістрів можна прочитати за допомогою спеціальних команд. Команди також дають змогу конфігурувати хаб, зчитувати стан портів.
Роз'єми. Штепсель USB має чотири контакти: перший - VCC (живлення); другий - дані (D-); третій - дані (D+); четвертий - заземлення.
Використовують два типи рознять. Розняття типу A (Upstream Connector) застосовують для приєднання до хабів. Вилки встановлюють на кабелях, не від'єднаних від пристроїв (клавіатура, миша), а гнізда - на низхідних портах. Розняття типу В (Donstream Connector) встановлюють на пристроях, у яких з'єднувальні кабелі від'єднувані (принтерах, сканерах): вилку - на з'єднувальному кабелі, а розетку - на пристрої. Протилежна частина кабелю має вилку розняття А. Розняття типів А та В розрізняють механічно, що не допускає петлевих сполучень хабів. Конструкція рознять забезпечує пізніше сполучення і раніше від'єднання сигнальних ліній порівняно з лініями живлення.
Шина USB дає змогу приєднувати до 127 пристроїв. Пристрої можна приєднувати та від'єднувати без вимкнення комп'ютера, всі приєднані пристрої використовують один номер переривання.
Живлення приєднаних пристроїв також відбувається через USB. Є змога керувати енергоспоживанням приєднувальних пристроїв. Водночас через USB живляться тільки пристрої з малим енергоспоживанням. Інші пристрої мають власні джерела живлення.
.5. Технологія Firewire Загальна характеристика
Шина Firewire призначена для швидкісного обміну інформацією між розташованими близько (до 4,5м) пристроями. Одночасно передавання відбувається по двох лініях (швидкісній та низькошвидкісній). Швидкості передавання 100,200,400 Мбіт/с досягають завдяки стисненню. Розроблено стандарт ІЕЕЕ-1394Ь, який працює зі швидкостями до 800 Мбіт/с.
* Firewire - це послідовна швидкісна шина. Передавання в ній повністю цифрове, синхронне, а також багатоканальне, тобто один пристрій може одночасно підтримувати зв 'язок з декількома іншими. Firewire може забезпечувати гарантовану смугу пропускання. Вона використовує мультиплексне квантування за часом і є різновидом системи з розподілом часу.
Головна сфера застосування Firewire - інтеграція побутової мультимедійної апаратури між собою та ПК (система може працювати і без ПК). З використанням Firewire приєднують такі типи пристроїв: ^ПК, ^>аудіо та ^>відео пристрої, ^принтери та ^сканери, ^жорсткі диски та ^і'хні масиви, ^цифрові відеокамери та ^магнітофони. З використанням Firewire можна сполучати і розташовані близько комп'ютери в локальну мережу.
Робота над прообразом мережі Firewire почалася ще 1988 р. в компанії Apple Computer. Мережа Firewire була задумана як заміна для паралельного SCSI інтерфейсу. У 1990р. розпочато розробку відкритого стандарту. Для цього вирішили використати напрацювання стандарту Apple. Було сформовано робочу групу з Apple Computer, Texas Instruments, Molex, Western Digital. Пізніше до цього колективу приєдналися IBM, Sony, Sun, Intel, Microsoft та інші провідні фірми. У грудні 1995 р. стандарт Firewire IEEE 1394 - 1995 p. нарешті схвалили. Цей стандарт відомий ще як ІЕС 1883.
Стандарт IEEE 1394 має три частини: перша описує 400 Мбітову шину, друга - гігабітову, третя - мости, що сполучають шини Firewire.
Структура. Окремий сегмент мережі IEEE 1394 (шина) складається з вузлів (до 63). Кожен вузол має один або декілька портів, до яких можуть приєднуватися інші вузли. Окремі шини об'єднують мостами, формуючи більші за розміром мережі. Максимальна кількість об'єднаних таким
способом шин -1023. Обмеження: між парою вузлів може бути не б 16 сегментів, унаслідок сполучення шин не повинні формуватися довжина кабелю, що сполучає два вузли, не перевищує 4,5 м.
| вання шиною. Firewire використовує чотири- або шестижиль-ний кабель (рис. 5.6, рис. 5.7), у якому є дві сигнальні пари та одна пара живлення. По од- І ному з дротів відбувається живлення (VP), а інший - це земля (VG). ДІ тотт, ппя пепелавання лани |

|
Логічна структура Firewire має деревоподібну форму. Один: строїв є кореневим. Якщо цей пристрій - ПК, то він може міститі між шинами IEEE 1394 та РСІ і виконувати додаткові функції з
| І). Дві скручені І Іаних та сигнал |
учені пари (ТРА та ТРВ) викорж;игналу синхронізації. По першії передається NRZ-сигнал даних другій - строб-сигнал, який зі свій стан, якщо два сусідні NRi виявилися однаковими. Кожна чена пара та весь кабель екрані Дроти живлення розраховані на до 1,5 А та напругу від 8 до 40 Б
Адресація
Кожен вузол має шестирозрядний номер, шина - десятирозря Максимальна кількість вузлів у системі - 64 449. Загальна довжи: реси - 64 біти. Т.ч. залишається ще 48 бітів для адресації застос кожного вузла, що дає 256 терабайт адресного простору.
Протокол IEEE 1394
Протокол охоплює функції > фізичного, > канального та >мере, го рівнів. Він передбачає можливість передавання ізохронних (їх редавання відбувається без очікування підтверджень) та асинхрі потоків. Асинхронні потоки складаються з повідомлень; кожне потребує окремого підтвердження Для
поліпшення часових napat

|
передавання асинхронних повідомлень допустимо передати 64 повідомлення без отримання підтвердження.
Фізичний рівень
Фізичний рівень відстежує рівень сигналу та стан зв'язку, кодування та декодування, синхронізацію. На МАС-підрівні відбувається арбітраж та ініціалізація шини. На LLC підрівні виконується надійне передавання синхронних та асинхронних пакетів. На мережевому рівні підтримуваний асинхронний протокол записування, читання, блокування та маршрутизації. Менеджер шини керує її конфігурацією, оптимі-зує арбітраж, керує споживанням електроенергії, призначенням керівного циклу, присвоєнням ідентифікатора синхронного каналу.
Метод доступу
Метод доступу в мережі - з розподілом часу. Один з вузлів, що відіграє роль "провідного циклів", періодично (через 125 мкс) передає в мережу часові позначки (індикатори), які визначають початок кадру. У кожному кадрі спочатку відбувається передавання ізохронних потоків, а потім - асинхронних. Для передавання асинхронних потоків резервують не менше 20 % кадру (рис. 5.8).
Асинхронний пакет має адреси відправника та отримувача. У випадку синхронного передавання відправник просить надати йому канал потрібної перепускної здатності. Наявний фізичний канал може бутиподілений максимально на 64 логічних канали. Кожен логічний каналотримує свій номер (ID), який є адресною інформацією в разі передавання синхронних данихїї її
Ініціалізація шини та порядок роботи
Операція ініціалізації шини виконується кожного разу під час при єднання чи від'єднання від шини нового пристрою. У цьому випадк; функції ізохронного адміністратора ресурсів та менеджера шини збе режені за пристроями, визначеними під час першої ініціалізації.
Один з пристроїв стає кореневим. Це як звичайно, останній з тих що брали участь у процесі ідентифікації. Отже призначення кореневе го пристрою може бути випадковим. Якщо потрібно закріпити корене вий пристрій за визначеним (наприклад, комп'ютером), то час ініціалі зації для цього пристрою штучно збільшують з використанням спе ціальної програми. Спочатку кожен вузол визначає статус своїх портів Ізольований порт отримує позначку нуль, "лист" дерева- один, а гілк< дерева -більше одиниці.
Кореневий пристрій стає "провідним циклів". Він має найвищий пріо ритет доступу до шини та синхронізує її роботу. Інші ролі мають "ізох ронний адміністратор ресурсів" та "адміністратор (менеджер) шини"
Під час ініціалізації в розподілі функцій беруть участь усі пристрої здатні їх виконувати. Перемагає пристрій з найбільшими функційним* можливостями (що залежать від його електроніки та ПЗ). Якщо більш* двох вузлів мають однакові можливості, то верх бере вузол з більши\ номером. Якщо жоден з пристроїв не в стані виконувати функції менеджера шини, то вона буде працювати без нього в режимі обмеженого адміністрування. Менеджер шини керує живленням, оптимізує використання перепускної здатності шини. Ці функції часто виконує одна: програм, що працює на комп'ютері.
Після призначення ізохронного адміністратора пристрої, які планують працювати з ізохронними потоками, запитують номер ізохронного каналу (максимальний - 63) та потрібну кількість часових інтервалів Адміністратор виділяє запитаний канал (або шукає інший, вільний } цей момент) та кількість слотів. Якщо адміністратор не може задовольнити запити пристрою з кількості інтервалів, то пристрій через деякий час буде повторювати запити доти, доки його заявка не буде прийнята
Арбітраж шини
Арбітраж забезпечує одночасне передавання в шині тільки одним вузлом, хоча всі вузли мають однакові права. Арбітраж відбувається у
|___!"!^а

|
кожному слоті передавання. Процедуру починають вузли, що мають зарезервовані ізохронні канали. Такий вузол надсилає запит на доступ до кореневого пристрою. Першим буде задоволене запит найближчого до кореня пристрою. Після "ізохронної паузи" - наступного і т. д. У цьому процесі не обов'язково беруть участь усі учасники ізохронного обміну. Після довшої перерви починається асинхронний арбітраж. Він подібний до ізохронного, тільки паузи між запитами довші, адже кожен запит повинен отримати підтвердження. Для того, щоб надати всім вузлам однакові права на передавання, кожному асинхронному вузлу дозволено передавати тільки один раз за період циклу.
Передавання інформації відбувається цілою кількістю слів, кожне з яких має довжину 4 байти. Пакет складається з двох слів заголовка (мінімально) та змінної кількості слів в інформаційній частині. Контрольні суми захищають окремо заголовок та інформаційну частину пакета. Заголовок асинхронного пакета довший (чотири слова), ніж ізохронного, він містить адреси джерела та отримувача, керівні біти, які, між іншим, задають пріоритет пакета.
5.6. Передавання даних з використанням SCSI Загальна характеристика та історія розвитку
Паралельна шина SCSI використовується для приєднання різноманітних периферійних пристроїв починаючи з 80-х pp.
Прототипом SCSI був інтерфейс SASI (Sugart Associates System Interface) розроблений у 80-ті pp. Інтерфейс був призначений для приєднання периферійних пристроїв. На його основі був розроблений та прийнятий ANSI в 1986 р. стандарт SCSI -1. В тому ж році почали роботу над стандартом SCSI -2. Розробники ставили перед собою задачу об'єднати стандарт SCSI - 1 з системою команд SCSI, яка не встигла ввійти в першу версію стандарту. Крім цього було внесено і деякі конструктивні зміни: нові команди, диференціальну синхронізацію, збільшену частоту та швидкість передавання. Стандарт SCSI -2 було прийнято в 1993 р.
Подальший розвиток SCSI був направлений на збільшення тактової частоти і швидкості передавання та ширини шини. Так, з'явилися такі різновидності SCSI як Fast SCSI, Wide SCSI, Ultra SCSI та ін. (див. табл. 5.1.)

Ці різновиди розроблялися різними виробниками в межах стандарту SCSI -2. Виробники SCSI - пристроїв об'єднані в SCSI Trade Association, яка визначає прийнятність того чи іншого варіанту шини.
Топологія та принцип функціонування
З'єднання SCSI має топологію ланцюжка (рис. 5.9). На комп'ютері встановлюється адаптер SCSI, перший пристрій під'єднується до його роз'єму, другий - до відповідного роз'єму першого і т. д. З метою узгодження хвильового опору та уникнення відбиття сигналу від "висячих" дротів ланцюжка до вільних роз'ємів першого та останнього пристрою ланцюжка мусять бути приєднані спеціальні пристрої - термінотори  реса кожного пристрою вибирається апаратно з використанням спеціальних перемикачів в діапазоні 0-7. Як правило адаптер SCSI отримує адресу 7 як таку, що надає найвищий пріоритет у передаванні. Інші пристрої отримують адреси, починаючи з нульової. Рекомендується для повільних пристроїв, таких як накопичувачі на магнітних стрічках давати більші адреси (і більший пріоритет), ніж швидким пристроям таким як жорсткі диски (для того, щоби диски не захопили шини).
реса кожного пристрою вибирається апаратно з використанням спеціальних перемикачів в діапазоні 0-7. Як правило адаптер SCSI отримує адресу 7 як таку, що надає найвищий пріоритет у передаванні. Інші пристрої отримують адреси, починаючи з нульової. Рекомендується для повільних пристроїв, таких як накопичувачі на магнітних стрічках давати більші адреси (і більший пріоритет), ніж швидким пристроям таким як жорсткі диски (для того, щоби диски не захопили шини).
Шина SCSI-1 забезпечувала паралельне передавання на відстань до 6 м зі швидкістю 5 Мбіт/с. Передбачалося два режими передавання -асинхронний, в якому після кожного посилання команди мусило надходити підтвердження та синхронний режим. Максимальна кількість приєднаних пристроїв дорівнювала 8, що визначалося шириною шини та алгоритмом її роботи. На практиці значну частину пропускної здатності шини займали накладні видатки на організацію передавання (паузи, очікування підтверджень тощо). Реальна швидкість передавання досягала 1-2 Мб/с.
Стандарт SCSI -2 передбачав можливість використання більшої частоти сигналу (10 МГц - Fast SCSI) та збільшення ширини шини (16 біт - Wide SCSI). Для збільшення довжини кабелю приєднання стандарт передбачає використання крім несиметричних з'єднань і диференціальних (симетричних), коли сигнал зчитується як різниця сигналу на двох лініях. Це дозволило збільшити довжину сполучення до 25 м. Але диференціальна сигналізація несумісна із симетричною в межах однієї шини. Для кожних 8 бітів передається один біт контролю парності. Збільшився і список типів пристроїв, які підтримує SCSI. Визначено
| п'ять нових типів пристроїв. З метою кращого захисту від завад кабель SCSI використовує скручені пари, які розташовані концентричне трьома шарами. Зовнішній /І шар служить для передавання даних, середній -команд та сигналів керування, внутрішній - для в сигналів підтвердження, землі, тощо (рис. 5.10). Порядок роботи Головним пристроєм виступає адаптер SCSI на комп'ютері, який визначає, якому з приєднаних пристроїв передавати в результаті виконай- |
гт «ттч_ TT/~»nT,rv тї-гто тттлга/т-гг^гчіт»
ня процедури арбітражу. На початку адаптер визначає чи вільна шина. Якщо шина вільна, він передає по лініях даних свій ідентифікатор. У відповідь пристрої, що претендують на передавання, передають біт по відповідному дроту. Таким чином, максимальна кількість приєднаних пристроїв обмежується кількістю дротів у шині та їх паралельним використанням у процедурі арбітражу. Право на передавання отримує пристрій з найбільшим пріоритетом.
В наступних версіях шини SCSI, де ширина шини дорівнювала 16, 32,.... можливе під'єднання більшої кількості пристроїв. Вважається, що пристрої з адресами 0-7 мають більший пріоритет, ніж з адресами 8-15. Це зроблено для того, щоб у ланцюжку могли працювати і пристрої старого, 8-розрядного конструктива.
Пристрій, який виграв арбітраж, стає Ініціатором (initiator) та обирає свого партнера по передаванню (цільовий пристрій - target), активізуючи одну з восьми ліній шини. Цільовий пристрій керує передаванням. Спочатку він звертається до ініціатора із запитом команди, яку йому потрібно виконати. Ініціатор надсилає потрібну команду. Цікавим є те, що команда є досить загальною і не специфікує детально потрібні дії пристрою. Контролер пристрою сам інтерпретує команду та визначає послідовність своїх дій. Наприклад, ПК просить НЖД прочитати певний інтервал логічних дисків. Контролер перетворює логічну адресу в фізичну адресу, враховуючи організацію збереження даних на конкретному диску.
Цільовий пристрій організує передавання даних. Якщо передавання асинхронне, то після передавання кожного байта очікується підтвердження. У випадку синхронного передавання дані передаються суцільним потоком, з попередньо визначеною швидкістю. Після завершення передавання цільовий пристрій запитує ініціатора про підтвердження (статус передавання). Якщо помилок не було, і повторювати нічого не треба, то цільовий пристрій сповіщає про закінчення виконання команди.
Для кожного типу пристрою стандарт передбачав власний набір високорівневих команд. Для SCSI-1 визначено шість типів пристроїв:
^> пристрій довільного доступу (жорсткий диск);
^ пристрій послідовного доступу (накопичувач намагнітиш стрічці);
^ принтер;
"^ процесор;
Г и_ ти.

|
^ CDROM- записувач;
^ пристрій довільного доступу тільки для читання.
Довжина команди складає 6 байтів. Перший байт визначає тип команди або код операції. Решта байтів команди інтерпретуються залежно від змісту першого байту. Всі команди передаються в асинхронному режимі, але якщо у відповідь на них передаються дані, то передавання таких відповідей - синхронне.
В стандарті SCSI -2 було введено дві нові команди: Disconnect та Reconnect. Вони дозволяли периферійному пристрою тимчасово звільнити шину під час виконання внутрішніх операцій, наприклад, пошуку даних на диску, та поновити з'єднання, коли пристрій готовий до передавання. За рахунок цього збільшили ефективність використання шини. Загалом в SCSI -2 ефективність використання досягла 70 %. З'явилася можливість формування гостом черг команд для одного пристрою і наступним пересиланням цілого набору послідовних команд. Контролер пристрою може опрацьовувати отриманий набір команд та оптимізувати процес їх виконання (наприклад - в елеваторному пошуку, коли запити до диску сортуються так, щоб забезпечити мінімальне переміщення головок диску).
Перспективи розвитку технології- SCSI З
Історія розвитку стандартів SCSI призвела до появи різноманітних вирішень, не завжди сумісних одне з одним. Розробка стандарту SCSI-3 була наступним кроком у напрямку універсалізації, розбиття єдиного стандарту на множину несумісних, об'єднаних тільки загальною архітектурою та набором команд технологій. На сьогодні розроблена загальна архітектура стандарту SCSI-3, яка передбачає можливість використання для реалізації передавання різноманітних інтерфейсних технологій, в т. ч. і послідовного передавання.
Стандарт SCSI-3 є не одним документом, а цілим набором документів, пов'язаних один з одним. На сьогодні визначена архітектурна модель SCSbS, Набір стандартів передбачає єдиний стандарт на архітектуру (SCSI Architectural Model- SAM) та нефіксований набір стандартів для конкретних її реалізацій.
Стандарт на загальний метод доступу (Common Access Method) визначає архітектуру засобів доступу госта, та відповідні сервіси. Стандарти на конкретні набори команд (Device-Type Specific Command Set)исують моделі конкретних типів пристроїв та команди, з якими працює цей пристрій.
Для опису архітектури SCSI-3 використано об'єктну парадигму: її сформульовано в термінах незалежних об'єктів, що взаємодіють та надають один одному через визначені інтерфейси визначені сервіси.
5.7. Будова та принципи функціонування адаптеру локальної мережі
Адаптери локальних мереж безпосередньо приєднуються до роз'ємів розширення комп'ютера та дозволяють досягти значно більших швидкостей передавання, ніж інші інтерфейсні порти. Фактично ця швидкість передавання обмежена тільки швидкістю передавання шини вводу-ви-воду та швидкістю, яка підтримується локальною мережею.
Будова та складові частини адаптеру
Розглянемо основні складові частини та особливості роботи адаптера локальної мережі на прикладі адаптера N1 5210 для мережі Ethernet фірми Interlan Inc.
Центральною частиною адаптера є сопроцесор INTEL 82568, який виконує деякі функції по опрацюванню кадрів канального рівня протоколу. Сопроцесор кодує інформацію перед передаванням у мережу, декодує її після прийому, виявляє та виправляє помилки, повідомляє ЦП про надходження даних, виконує головні функції по реалізації МАС - підрівня
протоколу канального рівня. Використання спеціалізованого сопроцесора дозволяє розвантажити ЦП та підняти загальну швидкодію системи.
Важливою частиною адаптера є оперативна пам'ять (8 Кбайт). У цю пам'ять записують інформацію перед передаванням і післяприймання. Пам'ять відображається на адресний простір комп'ютера (параметр Base Memory Adress). її може одночасно зчитувати і записувати як ЦП, так і мережевий співпроцесор.
У роз'єднувач розширення можна приєднати додаткову мікросхему пам'яті, або мікросхему постійної пам'яті (ПЗП) для автоматичного завантаження комп'ютера через мережу.
Вісім регістрів стану та керування дають змогу ЦП та співпроцесо-ру обмінюватись командами. Регістри перенумеровані за їхнім зміщенням від базового значення (параметр I/O Base Adress) - від OOh до 07h.
ПЗП адреси для адаптерів мережі Ethernet містить унікальну мережеву адресу комп'ютера, визначену фірмою-виробником адаптера. Жодна з цих адрес не може повторитися. Кожна фірма-виробник має адреси з певного діапазону. Довжина фізичної адреси для мережі Ethernet - 48 біт.
Перемикачі дають змогу конфігурувати параметри адаптера.
Кабельні роз'єднувачі призначені для приєднання адаптера до мережі. В адаптері, який розглядаємо, є два роз'єднувачі для приєднання адаптера до тонкого (BNC-роз'єднувач) або до товстого (AUI- роз'єднувач) Ethernet.
Крім того, на платі адаптера також розміщено трансивер (приймач-передавач) для роботи з тонким Ethernet. Товстий Ethernet використовує зовнішній трансивер.
Роз'єднувач приєднання до системної шини ПК. Роглянувши форму роз'єднувача, кількість та конфігурацію контактів, можна визначити розрядність адаптера і тип шини, для якої його спроектовано.
Робота адаптера під час приймання та передавання даних
Передавання даних. Комунікаційне програмне забезпечення будує кадри Ethernet та записує їх у пам'ять адаптера. У регістри керування та стану записується команда передати кадр, адреса та кількість інформації для передавання. Мережевий співпроцесор аналізує значення регістрів, бере кожен кадр, опрацьовує його згідно з вимогами протоколу і передає у мережу.
Приймання даних. Мережевий співпроцесор постійно стежить через трансивер за кадрами в мережі та виділяє ті, які призначені для конкретного адаптера. У випадку надходження такого кадру, співпроцесор
еревіряє правильність даних, розміщує їх у пам'яті, записує в регістри керування команду приймання даних, адресу їхнього розміщення у пам'яті і видає для центрального процесора переривання з визначеним номером. ЦП та комунікаційне ПЗ відкидає службові дані, аналізує прийняті дані та переміщує їх у головну пам'ять.
Конфігурування адаптера
Конфігуруванням адаптера задають такі параметри:
Ч> I/O Base Adress - адресу нам 'яті, куди відображаються регістри стану та керування;
^> Base Memory Adress - адресу нам 'яті, куди відображається внутрішня нам 'ять адаптера;
^IRQ- номер переривання, за яким ЦП повідомляють про прийняті дані.
Конфігурування адаптера відбувається шляхом задання значень параметрів з використанням перемикачів. Сучасні адаптери, як звичайно, не мають перемикачів, їх конфігурують спеціальними програмами, доданими до адаптера. Адаптери, що відповідають вимогам стандартів Plug and Play, можна конфігурувати автоматично засобами операційної системи. Для збільшення швидкості пересилання інформації часто використовують механізми прямого доступу до пам'яті (DMA). Номер каналу DMA у цьому випадку - це ще один парамеі:р Конфігурування адаптера.
Визначальним для сучасної епохи є перехід від класичних мереж зі швидкістю близько 100 Мбіт/с до швидкісних, що передають дані зі швидкістю 1000 та 10000 Мбіт/с. Використання в одній мережі різнош-видкісних технологій передбачає, щоб адаптери підтримували функцію автоузгодження, тобто автоматично узгоджували швидкість передавання зі своїм партнером. Високі вимоги щодо швидкості зумовлюють і зміни в структурі адаптерів. Розглянемо, наприклад, мережу Gigabit Ethernet. ПК з 32-розрядною PC] шиною здатні передавати трафік 1 Гбіт/с, а адаптери з 64-розрядною шиною - 2 Гбіт/с. Водночас з такою швидкістю можна завантажити практично 100 % ресурсів ЦП, На виконання інших завдань не залишиться ресурсів. Тому адаптери Gigabit Ethernet мають вбудований RISC процесор, що виконує інтелектуальні функції вивантаження, які налагоджені на параметр» конкретного комп'ютера. Дані з мережі відразу надходять у пам'ять і стають доступними для застосувань. Щоб зменшити завантаженість ЦП. регулюють співвідношення кількості переривань та обсягу отриманої
інформації. За одне переривання приймається велика кількість кадрів. Співвідношення кількості кадрів на одне переривання можна задати вручну або автоматично. Це дає змогу створити "адаптивні" переривання, частота яких залежить від завантаження
Г?1 ТЕСТИ ДЛЯ САМОКОНТРОЛЮ
/. У шині РСІ передавання:
а) послідовне; б) паралельне.
2. У шині РСІ-е передавання:
а) послідовне; б) паралельне; в) з комутацією пакетів.
3, Сполучення х8 шини РСІ-е має пропускну здатність:
а) 5 Гб/с; б) 100 Мб/с в) 10 Гб/с;
г) 1 Гб/с; д) 20 Гб/с.
4. Мережа USB має топологію:
а) кільцеву; б) деревовидну; в) ланцюжкову; г) шинну.
5, Сполучення SCSI має топологію:
а) кільцеву; б) деревовидну; в) ланцюжкову; г) шинну.
Лабораторна робота
Вивчення параметрів налаштування мережевих інтерфейсів
Метою лабораторної роботи є вивчення та документування параметрів налаштування мережевих інтерфейсів комп 'ютера.
Засоби та передумови
Робота виконується у навчальному класі, обладнаному локальною комп'ютерною мережею. В локальній мережі встановлені комп'ютери з операційною системою Windows 2000 або Windows XP. Кожен комп'ютер обладнано декількома мережевими інтерфейсами (наприклад -Ethernet, Bluetooth, Wi-Fi).
Порядок виконання роботи
1. Увійдіть у систему та відкрийте вікно Device Manager.Control Panel -> System -> Hardware-> Device Manager.
2. У дереві пристроїв знайдіть гілку Мережевих адаптерів. Для кож
ного з адаптерів запротоколюйте такі властивості як МАС - адресаномер переривання IRQ, діапазон адрес пам'яті.
3. Визначте параметри налаштування мережевих інтерфейсів іншимшляхом. У командному рядку наберіть команду ipconfig /all.
Запротоколюйте вивід та поясніть його

|
ТЕМА 6 ЛОКАЛЬНІ МЕРЕЖІ
6. 1. Мережа Ethernet Загальна характеристика та історія розвитку
Локальна мережа Ethernet проста, дешева, надійна та ефективна, має високу швидкість передавання даних і завдяки цьому стала найпоширенішою. У більшості сучасних материнських плат інтегровано адаптер Ethernet.
Перший лабораторний варіант Ethernet розробила фірма Xerox (відділення в Пало-Альто) ще 1975 р. У1980 p. Xerox, DEC та Intel опублікували специфікацію Ethernet, яка охоплювала фізичний та канальний (МАС) рівні протоколу. Сьогодні мережа Ethernet схарактеризована в стандартах ІЕЕЕ-802.3 та ЕСМА-82. Завдяки простоті, дешевизні, здатності до масштабування Ethernet є лідером серед інших типів локальних мереж. Ця технологія продемонструвала значний потенціал розвитку та стала основою для технологій комутованого Ethernet, Fast Ethernet та Gigabit, 10 та 40 Gigabit Ethernet.
Принцип дії та метод доступу
Локальна мережа Ethernet відноситься до класу локальних мереж, в яких використовується середовище передавання спільне для багатьох робочих станцій. Проблему ефективного використання, розподілу єдиного середовища між багатьма користувачами та вирішення можливих конфліктів (колізій), вирішує метод доступу.
Методом доступу у мережі Ethernet є МДКН/ВК(Метод доступу з контролем несучої та виявленням колізій - CSMA/CD - Carrier Sense Multiple Access with Collision Detection). Цей метод відноситься до конкурентних методів доступу, в яких розробники вирішили дати змогу будь-якій станції передавати інформацію тоді, коли їй буде потрібно, а також спробували мінімізувати наслідки неминучих у такому випадку конфліктів.
Метод доступу МДКН/ВК може бути описаний як набір двох простих правил, які повинні виконувати всі робочі станції.
І....... —^І
ч> Першим з таких правил є контроль сигналу-носія, тоото прослухо-вування каналу, або "слухай перш ніж говорити". У таких мережах станція постійно прослуховує канал. Якщо канал вільний, станція починає передавання, якщо ж зайнятий - чекає. Звідси і походить перша частина назви методу доступу - метод доступу з контролем сигналу-носія (МДКН - Carrier Sense Multiple Access (CSMA)). Однак виявилося, ще й тут також можливі одночасні передавання декількох станцій (колізії) Чому ж вони виникають?
Час поширення сигналу мережею скінченний. Якщо одна станція почала передавання, а до другої сигнал ще не дійшов, то вона теж мож«почати передавання. Тоді й виникає колізія (рис. 6.1).
Нехай Д?.. = t. -1. - різниця часу між печатками передавання кадри станціями / тау; т.. - час поширення сигналу від станції / до станції j Тоді умову виникнення колізії між передаваннями станцій і тау можне записати так:
Д^.. <т.,
V. V
а умову виникнення колізії в мережі - так:
3(У)(Д^<тр.
Для ефективного використання каналу треба зменшити тривалісті колізії. Водночас, потрібно дати час усім станціям зафіксувати наявністі колізії. Томустанції,якіувійшлуколізію,передаютьшумовупо
|
слідовність протягом часу 2т, причому
т = тахт..
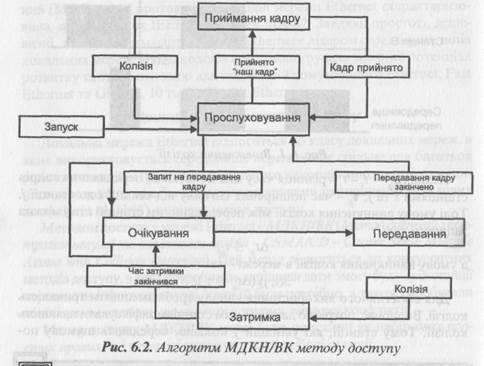
^> Другим правилом роботи МДКН/ВК є правило виявлення та опрацювання колізій. Як правило, сам факт наявності колізії визначається адаптером по збільшенню рівня напруги в середовищі передавання. При виявленні колізії станції можуть певний час підтримувати сигнал колізії, так щоби всі станції мережі змогли виявити колізію. Після цього передавання переривається. Станції, які не передали свої кадри внаслідок колізії, знову спробують передати інформацію, але через часовий інтервал, що вибирається з використанням датчика випадкових чисел. Завдяки цьому зменшується ймовірність взаємного блокування повторних передавань. Якщо ж наступна спроба передавадня була знов невдалою, передавання знов відкладається на випадковий інтервал часу, але середнє значення розміру цього інтервалу зростає з кожною наступною невдалою спробою передавання. На рис. 6.2 подано алгоритм МДКН/ВК методу доступу.
Станція постійно прослуховує середовище передавання і аналізує адреси всіх кадрів, що передаються. Якщо кадр адресовано цій станції, то вона його приймає, а потім знову прослуховує середовище. У випадку, коли від вищого рівня протоколу надійшов запит на передавання кадру, то станція його передає відразу, якщо середовище передавання вільне, або чекає доки воно звільниться. Якщо передавання закінчилося нормально, то станція прослуховує середовище. Якщо ж виявлена колізія, то станція визначає випадковий інтервал затримки і знову очікує звільнення середовища.
Перевагою МДКН/ВК є висока ефективність, а також те, що тут немає службової інформації. Недоліки методу: > мережа з МДКН/ВК ефективна, якщо навантаження мале; >із збільшенням навантаження вплив колізій збільшується. У мережі з МДКН/ВК також не можна гарантувати часу передавання кадру.
Різновиди технологічних вирішень
Топологічна структура, параметри та вартість реалізації мережі Ethernet залежать від типу кабельного з'єднання та технічного вирішення. Різні типи мережі за їх технічний вирішеннями маркують так:
NNNN Base-XX
У познач

